高可靠航天伺服多相容錯電機的選型研究
2019-02-19 07:17:58張中哲史晨虹劉春慶徐志書
導彈與航天運載技術 2019年1期
關鍵詞:故障
趙 輝,張中哲,史晨虹,劉春慶,徐志書
(北京精密機電控制設備研究所,北京,100076)
0 引 言
伺服電機是航天機電伺服系統的核心動力元件,其性能的優劣對整個伺服系統的性能起著決定性作用。隨著航天技術的發展,對航天機電伺服系統的可靠性和比功率的要求也越來越高,而多相電機在高可靠以及容錯前提下的高比功率有著先天的優勢,已成為提升航天機電伺服系統性能的一個研究熱點[1]。
在多相電機的方案構型中,隨著電機相數的增加,其驅動器硬件規模、資源成本以及控制算法的復雜性也會相應增加[2]。因此,考慮到實際應用的可行性,目前對于多相電機的選擇大多為四相、五相及六相3種電機。本文分別對3種多相電機進行相應仿真,分析3種電機在正常以及一相開路故障狀態下的運行狀況,推導一相開路容錯控制算法并進行仿真驗證,從而在3種多相容錯電機方案中進行最優選型。
1 多相容錯電機方案構型
1.1 多相容錯電機的電磁方案
為了滿足航天工程的實際應用,其機電伺服系統所采用的多相電機應具有高可靠性、高比功率、短時大功率輸出能力以及平穩轉矩輸出等特性[3]。
本文中待研究的四相、五相、六相電機選型方案分別為四相八槽十極、五相十槽十二極、六相十二槽十四極,且均采用分數槽集中繞組結構。分數槽集中繞組結構可以杜絕不同相之間的短路,使得不同相繞組之間實現物理隔離、磁隔離及熱隔離,避免了故障的蔓延,提高了系統的可靠性。同時,分數槽電機線圈端部較短,能夠有效減少銅損,提高電機效率,降低電機熱負荷[4],從而滿足航天伺服電機的短時大功率輸出特性。
對于極槽匹配的選擇,本文選擇槽數和極數接近的極槽配合,其目的在于使電機繞組因數盡量高,從而提高伺服電機比功率。而對于定子槽數Q與轉子極對數p滿足Q=2p-1的極槽配合方案,使電機有一個徑向不平衡磁拉力,該力除了對轉子臨界轉速和動態響應產生不利的影響外,還會導致額外的振動和噪聲,影響電機壽命,降低可靠性[5]。因此,本文采用Q=2p-2的極槽配合方案。
1.2 多相容錯電機的結構方案
多相電機采用表貼式 Halbach永磁體結構,相比平行充磁和徑向充磁,Halbach充磁方式優點在于可以使電機具有更高的功率密度和更低的轉矩波動。更重要的一點,Halbach充磁方式由于其磁自屏蔽性的特點,轉子磁場單邊分布,因此,Halbach式永磁電機可以采用薄鐵心甚至無鐵心設計,以此降低轉子轉動慣量,提高電機比功率。
2 基于Ansoft多相容錯電機仿真分析與選型
利用Ansoft軟件平臺,對所選擇的四相八槽十極、五相十槽十二極、六相十二槽十四極3種方案容錯電機進行有限元仿真分析,通過對磁密、轉矩、轉矩波動以及電機損耗等各項性能參數進行比較分析,以確定最優選型。同時,基于航天伺服電機的特性要求,提出以下前提條件:
a)3種方案容錯電機設計外形、尺寸均相同,即盡量使其具有基本相同的功率密度;
b)有較大輸出功率,要求電機轉速7000 r/min時轉矩70 N·m以上,輸出功率大于50 kW;
c)可以平穩輸出轉矩,其轉矩波動不大于5%;
d)具有一相開路故障的容錯能力,在故障狀態下運行可以保持原力矩輸出,且轉矩波動不大于10%;
e)電機具有較高效率,其銅耗、鐵損等損耗盡可能低。
2.1 正常狀態下運行的仿真分析
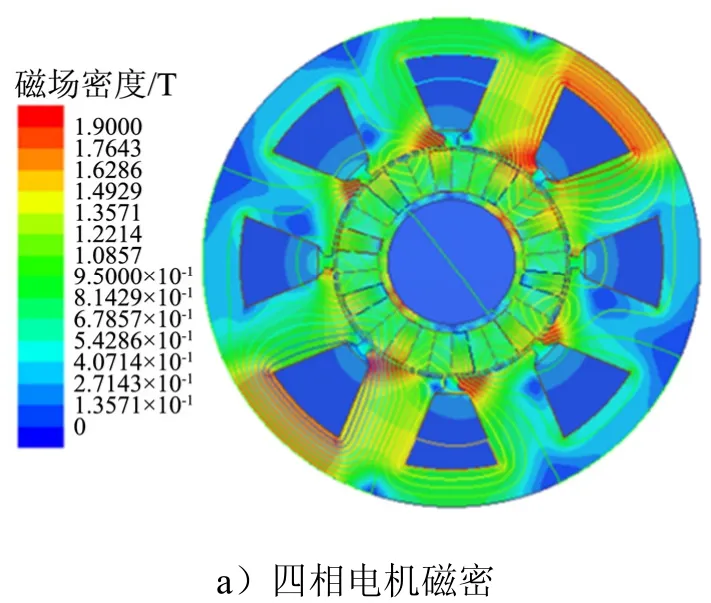
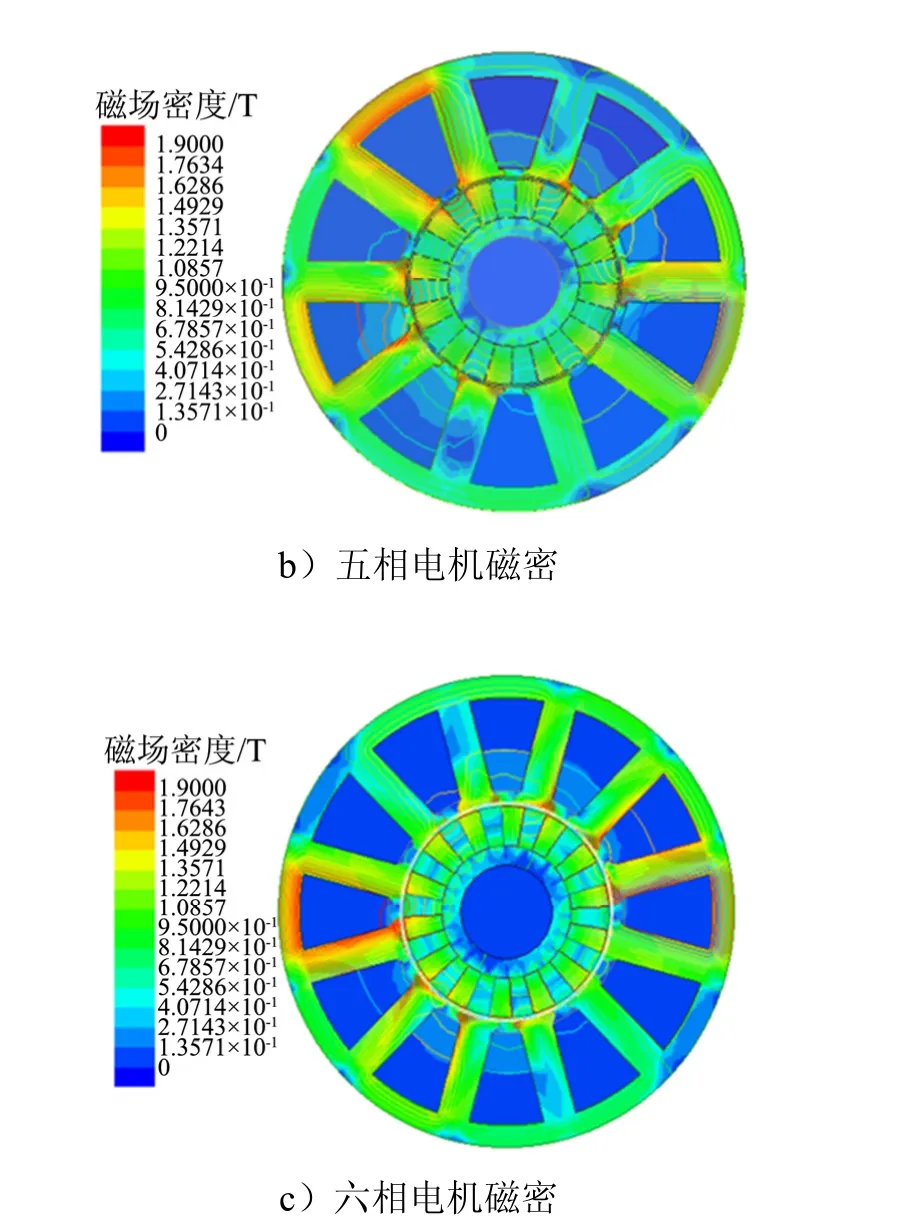
3種方案電機負載運行磁場密度云圖如圖1所示。
續圖1
由圖1可以看出,在正常狀態下,四相電機定子存在較大程度的飽和,經過仿真計算,其定子局部最大磁場密度達到2.6 T,若要消除飽和,則需增加電機尺寸,此時電機質量會相應增大,功率密度也會隨之減小。相比之下,五相和六相多相容錯電機定子齒部磁場飽和程度適中,可以做到較大的功率密度。
正常狀態下運行,3種電機輸出轉矩曲線如圖 2所示。
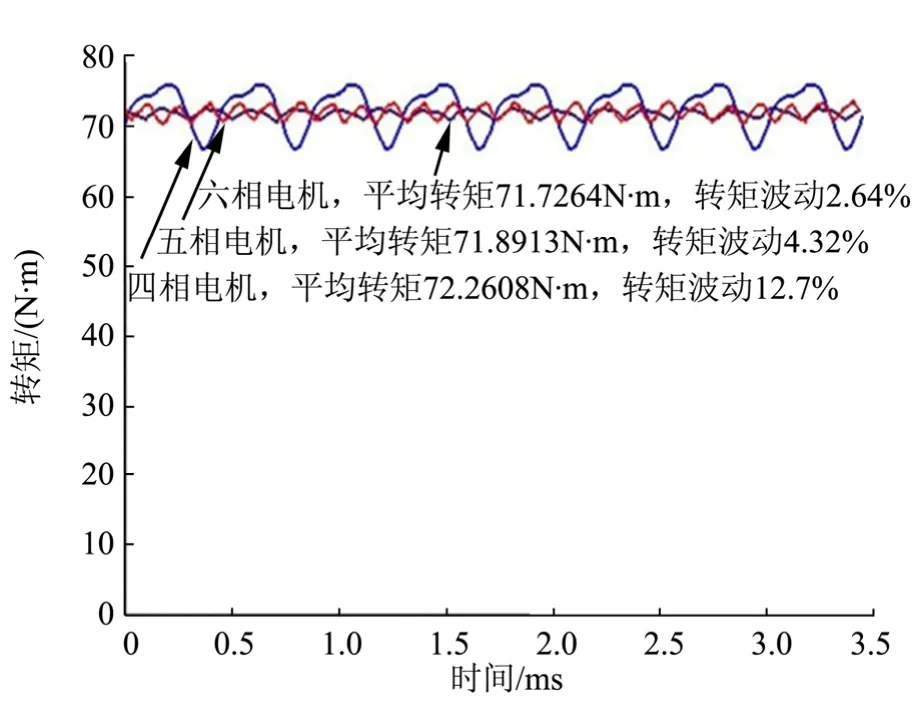
圖2 正常狀態下3種方案電機轉矩Fig.2 Three Schemes of Motor Torque Chart under Normal State
由圖 2可知,3種方案的電機的平均轉矩在7000 r/min下均能達到72 N·m左右,滿足前提條件的要求。在轉矩波動方面,四相電機的轉矩波動較大,達到 12.7%,不能滿足平穩輸出的前提條件,與此相比,五相及六相電機運行更加平穩,其轉矩波動分別為4.32%和2.64%。由此可以看出,四相電機運行穩定性較差,轉矩波動很大,而大的轉矩波動也會影響電機壽命,從而降低電機的容錯性能和可靠性。
3種方案電機在正常狀態下運行的性能參數對比如表1所示。
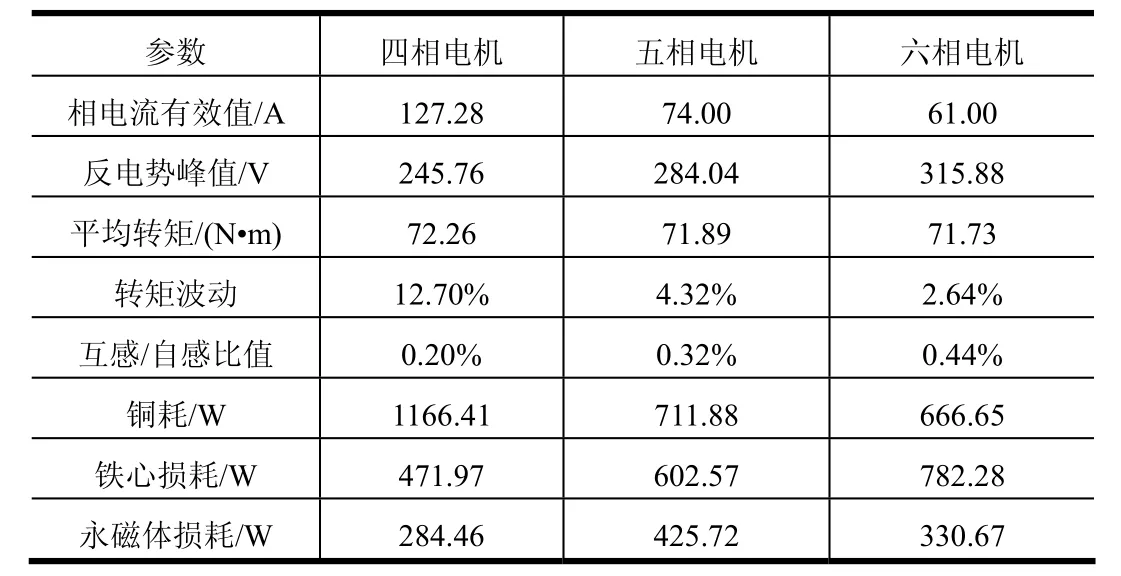
表1 正常狀態運行參數表Tab.1 Table of Operating Parameters under Normal State
由表 1中可以看出,采用集中式繞組的電機,其互感與自感之比均在1%以下,證明此種繞組方式不僅可以做到物理及熱隔離,還可以進行磁隔離,有利于提高電機的容錯性能。
在電機損耗方面,鐵心損耗隨著電機相數的增加而增加,而永磁體損耗差距較小,四相、六相電機均為300 W左右,五相電機較大,為425.72 W。銅耗方面由于四相電機相電流有效值較大,因此其銅耗相對于五相及六相電機較大,而銅耗是永磁同步電機損耗所占比值最大的一部分。由此可見,四相電機的損耗更大,達1.9 kW,而五相、六相電機損耗相仿,均為1.7 kW左右。
2.2 一相開路狀態下運行仿真分析
在電機各種可能發生的故障中,開路故障出現概率最大,其中逆變器電子元件失效、焊點接觸不良、振動或沖擊造成的脫落等均會造成開路故障。故障發生后,電機繞組分布和定子磁動勢均不對稱,使電機平均轉矩下降,轉矩波動增大,嚴重影響電機正常運行。圖3為3種方案電機在某一相開路后運行的轉矩仿真圖。由圖3可以看出,發生一相開路故障后,電機性能嚴重下降,3種電機平均輸出轉矩由72 N·m下降到57 N·m,下降了20%,轉矩波動也增大到了50%。此時電機不能正常運行,需對電機進行容錯控制。
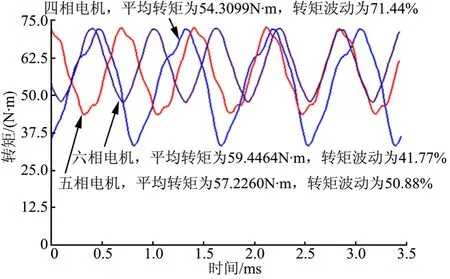
圖3 開路狀態下3種方案電機轉矩Fig.3 Three Schemes of Motor Torque Chart in Open State
2.3 一相開路故障下容錯運行的仿真分析
對于多相容錯電機,當某一相發生開路故障后,系統經過檢測和診斷,將相應相的IGBT功率管關斷,切除故障相,驅動控制器切換容錯控制算法,通過補償剩余相的電流,基于磁動勢不變原則,重新形成圓形旋轉磁場,使電機繼續平穩運行。
本文以銅損最小為約束條件,基于磁動勢不變原則,以四相電機為例進行開路補償電流的推導。
四相容錯電機正常運行時各項電流表達式:

式中 iA為A相電流;iB為B相電流;iC為C相電流;iD為D相電流;ω為電流角頻率; Im為相電流幅值
進一步得到電機定子磁動勢的表達式:

式中 fA, fB, fC, fD分別為電機各相磁動勢; Ns為匝數;θs為電角度。
定子合成磁動勢表達式為

令電機故障后的定子合成磁動勢與故障前保持一致,可得:

以銅損最小為目標定義目標函數:
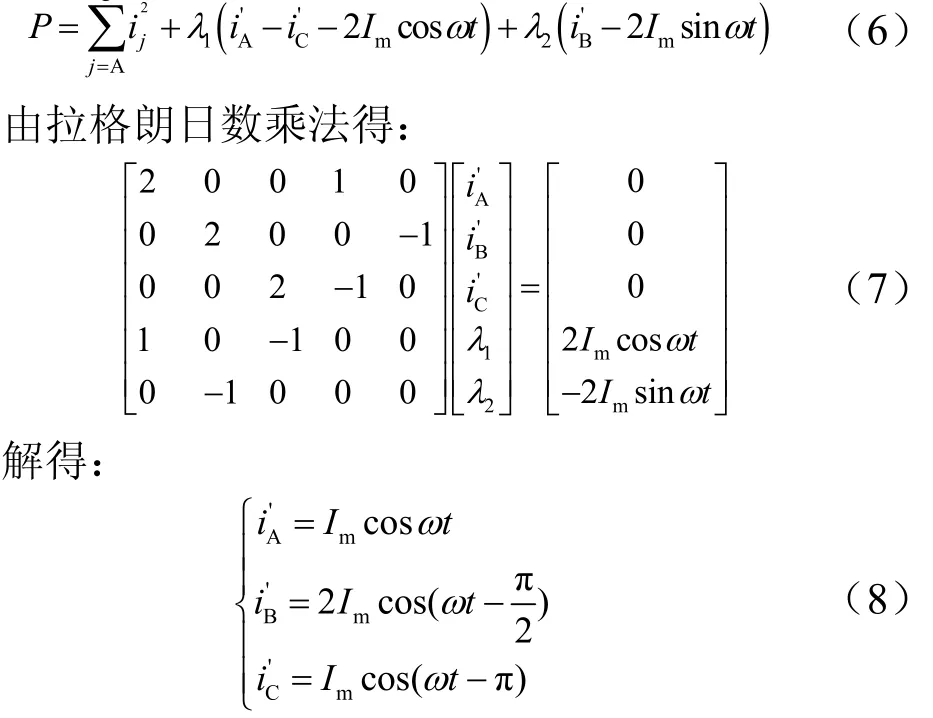
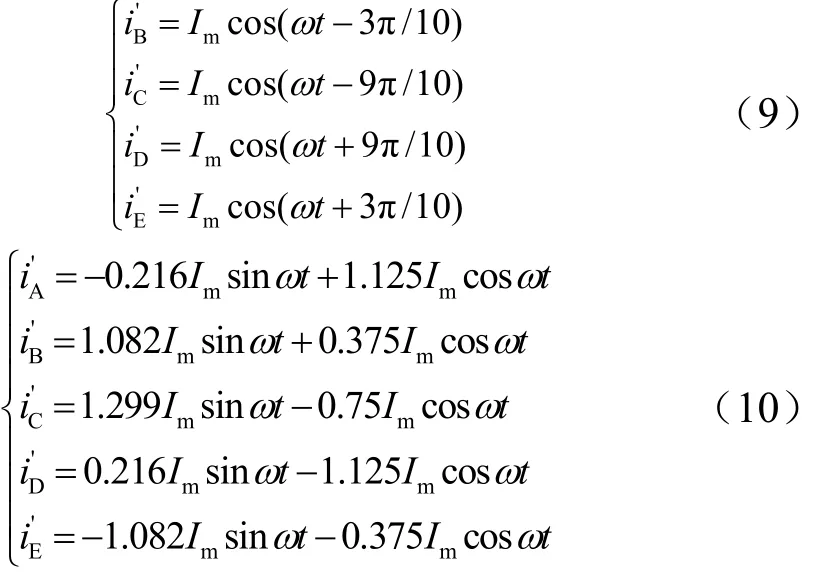
同理可推導五相與六相開路補償電流表達式,分別如式(9)和式(10)所示:水平,但四相電機容錯控制后,轉矩波動增大9.97%,為22.67%,遠高于轉矩波動不大于10%的指標。
對于開路故障的仿真,令故障相電流為0,正常相輸入補償電流,利用有限元軟件進行仿真分析,得出電機輸出轉矩曲線,將正常運行、一相開路及容錯運行3種模式下的轉矩進行對比,3種方案對比結果如圖4所示。
由圖4可以看出,與開路故障下的運行狀態相比,進行容錯控制后的電機輸出轉矩趨于平穩,平均轉矩提高,證明容錯方案的可行性。五相電機在容錯運行下的平均轉矩完全達到正常狀態下的水平,而轉矩波動升高2.74%,為 7.06%,運行較為平穩,六相電機平均轉矩與正常運行相比略有下降,而在轉矩波動方面,六相電機容錯運行后轉矩波動增加5.48%,為8.12%,超過五相電機;而對于四相電機,其平均轉矩也達到了故障前

圖4 3種運行狀態轉矩對比Fig.4 Torque Comparison of Three Operating States
各方案電機一相開路容錯運行狀態其他參數如表2所示。
由表2可知,經過容錯控制后的電機,較開路狀態下的性能有了較大的提升,基本達到電機故障前的水平。為了補償故障相,電機在容錯運行時正常相電流有效值及反電勢峰值都有不同程度的增大,從而電機的損耗也相應的增大,其中損耗最多的為四相電機,3種損耗總和達到2.9 kW,而五相電機和六相電機的損耗分別為2.2 kW和2.1 kW。

表2 容錯狀態運行參數表Tab.2 Table of Operating Parameters under Fault-tolerant State
2.4 選型分析
本文通過有限元仿真,分別對四相八槽十極、五相十槽十二極及六相十二槽十四極3種選型方案進行對比,對3種運行狀態進行仿真,結果如下:
a)在正常運行狀態下,四相電機定子齒部存在較大程度的飽和,且轉矩波動較大,運行不穩定,電機運行損耗較大,效率比較低。而五相、六相電機在正常狀態下運行性能良好,無明顯區別。
b)在開路故障狀態下,3種方案電機性能下降嚴重,平均轉矩減小,轉矩波動增大,其中四相電機受影響最為嚴重,六相電機平均轉矩下降相對較少。但如果不采取相應措施,3種電機依然無法正常工作。
c)在容錯運行狀態下,四相電機轉矩及轉矩波動有明顯改善,但仍沒有達到相應指標;五相電機進行容錯控制后,其平均轉矩較正常狀態無明顯變化,轉矩波動增加較小;六相電機容錯后的平均轉矩略低于正常狀態,而且轉矩波動較正常狀態有了明顯的提高,超過五相電機。
綜上所述,四相電機磁場密度飽和程度較大,轉矩波動沒有達到指標要求,故而舍棄此方案。五相、六相兩種方案容錯電機均可滿足指標,但考慮到系統成本資源,即相數越多,需要的IGBT以及橋路越多,控制算法越復雜,因此五相較六相更具優勢。因此,對于高可靠伺服容錯電機應優選五相方案。
3 結 論
本文以高可靠航天機電伺服系統為應用背景,利用Ansoft有限元仿真軟件分別對四相八槽十極、五相十槽十二極、六相十二槽十四極3種構型的多相容錯電機進行分析研究。通過對3種方案電機在正常狀態、一相開路狀態及容錯狀態下的磁密、轉矩、轉矩波動以及電機損耗等各項性能參數的對比分析,并綜合考慮系統硬件規模及成本資源,認為五相十槽十二極構型電機是適用于航天應用的多相容錯電機最優方案。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
