基于KH算法的高速列車ATO控制策略優化研究
2019-02-22 09:46:28王瑞峰
鐵道標準設計 2019年3期
李 琪,王瑞峰
(蘭州交通大學自動化與電氣工程學院,蘭州 730070)
隨著我國高速鐵路的迅速發展,對列車運行能耗、舒適度、停車準確性以及準點性提出了更高的要求。高速列車自動駕駛(ATO)控制技術[1-3]越來越受到人們的重視,ATO必將成為我國新一代高速鐵路列控系統的發展方向。ATO系統在給定約束條件下尋找滿足優化目標的速度-距離曲線,生成最優駕駛策略供下層控制參考[4],因此策略優化效果會對列車運行產生直接影響。
Howlett基于龐特里亞金極大值原理,證明在規定區間與時間內最小化列車運行能耗問題存在一個最優控制策略[5]。Seong-Ho Han等利用遺傳算法建立了列車最優運行控制策略并應用于ATO中[6]。María Domínguez等利用粒子群算法對列車ATO運行速度曲線進行優化[7]。余進等以列車能耗、運行時間及停靠準確性建立多目標優化模型,采用二進制和實數域的混合微粒群優化方法對列車運行控制序列和運行距離進行優化[8]。孟建軍等采用遺傳算法對高速列車ATO追溯目標曲線進行優化[9]。李誠利用粒子群優化算法得到可以直接控制列車駕駛的全局ATO控制策略,為ATO控制策略的研究提供了新的方法與思路[10]。
高速列車ATO系統的研究尚處于發展階段,現有對高速列車ATO控制策略的優化研究對約束條件的考慮存在不足,使得優化結果偏離實際情況,所用優化算法精度不高,容易陷入局部極值。
磷蝦群算法(Krill Herd, KH)[11]是Gandomi和Alavi從南極磷蝦群生活環境和生活習性中受啟發提出的一種新型優化算法。該算法具有良好的局部和全局優化性能,能有效平衡全局搜索和局部開發,避免陷入局部極值[12]。本文充分考慮影響高速列車運行的各種因素,建立列車多質點模型,將實際運營中列車過分相區斷電惰行納入運行工況,以能耗、準點性、停車準確性及舒適性為指標建立多目標優化模型,利用KH算法求解高速列車全局ATO控制策略,保證優化過程有較好的收斂速度并得到精度較高的優化結果。
1 列車多質點模型
列車單質點模型沒有考慮列車進入變坡點與變曲率點后受力變化情況,使得計算結果偏離了列車運行實際情況。因此,本文利用多質點模型對列車運行過程進行分析。
多質點模型是在考慮列車長度的情況下將每輛車簡化為一個質點,構成一個非剛性連接的質點鏈,在列車運行過程中對每個質點進行受力分析,比單質點模型更能準確地反映列車的受力和運行情況。但非剛性多質點模型比較復雜,計算量偏大,參考文獻[13]將多質點鏈視為剛性連接,列車運行狀態取決于列車所受合力。多質點模型主要是在考慮列車長度的情況下分析列車在變坡點和變曲率點所受附加阻力漸變過程。圖1為CRH5型(5動3拖)動車組在變坡點受到的附加阻力。

圖1 變坡點列車所受附加阻力示意
由圖1可知,動車組從坡度為i1的坡段進入坡度為i2的坡段,所受坡道附加阻力會隨著其在兩坡段長度的變化而發生改變。設動車組長度為L,在i2坡段的長度為l,則此時動車組受到的坡道單位附加阻力
(1)
動車組所受曲線附加阻力也隨其在曲線段位置的改變而發生變化,設動車組在曲線段內的長度為l′,曲線半徑為R,此時動車組所受曲線附加阻力
(2)
式中,A為用試驗方法確定的常數,根據《列車牽引計算規程》[14],A=600。
綜上,可得出動車組在運行過程中受到的總單位阻力為
ω=ω0+ωi+ωr+ωs(N/kN)
(3)
其中,ω0為動車組所受基本阻力;ωs為隧道附加阻力(采用參考公式[15]進行計算:ωs=0.000 13×Ls,N/kN;Ls為隧道長度)。
依據以上受力分析,可列出
(4)
其中,C為動車組所受合力,kN;F為動車組牽引力,kN;B為動車組制動力,kN;M為動車組質量,t;g為重力加速度,取9.8 m/s2。此處列出的是全部外力,動車組所受合力應視具體工況進行選擇。
根據動能定理(系統動能的微分等于合力做功的微分)推導出動車組多質點運動方程
(5)
式中,a為動車組加速度,m/s2;γ為動車組回轉質量系數。
2 控制策略優化模型
2.1 指標模型
以牽引力做功為測算方法,得到動車組全程運行能耗
(6)
運行時間誤差指標
ft=exp(|T′-T|/τ)
(7)
動車組舒適度反映乘客的乘坐質量,用單位時間內加速度差的累加和表示[16],則舒適度指標為
(8)
停車準確性指標
fwc=|S-s|
(9)
參考文獻[10],優化工況執行距離過程中利用貪心算法,以實際運行速度貼近最高運行速度來確定運行工況,在優化目標模型中加入速度防護指標
(10)
以上各式中,η為傳動系統效率;τ為誤差比例,調節ft取值范圍;T′、T分別為實際運行時間和計劃運行時間;S為區間長度,s為列車實際運行里程;Vmax為最高運行速度(一般取最高限速以下的一個合理值[17],本文在線路最高限速的基礎上減去7 km/h作為Vmax值)。
2.2 策略優化模型
以列車運行過程中能耗、準點性、停車準確性、舒適性及速度防護為優化目標,建立多目標優化模型
f=minG(fe,ft,fc,fwc,fcs)
(11)
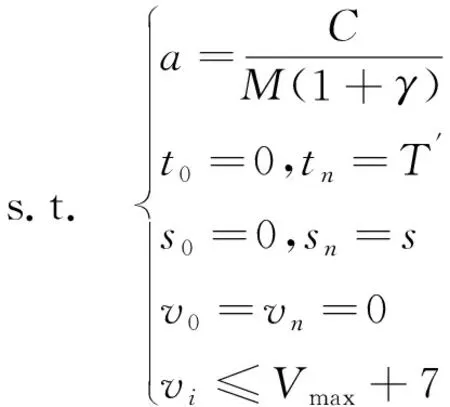
(12)
其中,G(·)為多目標適應度函數。對于多目標優化,選擇權重和的方法,將其轉化為單目標優化問題,各優化指標權重參考文獻[18]設定。
3 ATO控制策略KH優化算法
KH算法的主要思想是每個磷蝦個體在食物和周圍磷蝦的綜合影響下,計算磷蝦個體的適應度來評判每個粒子的優劣,通過迭代計算找到滿足約束條件的最優解。
KH算法中每個磷蝦個體的進化受3個運動分量的影響,其第k次移動Xi(k)可表示為
Xi(k)=Fi(k)+Ni(k)+Di(k)
(13)
式中,Fi(k)為i受到食物引導所做出的覓食移動;Ni(k)為i受其他磷蝦個體引導做出的引導移動;Di(k)為i的物理隨機擴散。
(1)覓食移動
磷蝦i的覓食移動定義為
Fi(k)=ufβi(k)+ωfFi(k-1)
(14)
式中,uf為覓食速度;Fi(k-1)為上一次的覓食移動;ωf∈[0,1]為兩次覓食移動的慣性權重;βi(k)為覓食移動源,定義為
(15)

(2)引導移動
磷蝦i的引導移動定義為
Ni(k)=Nmaxαi(k)+ωnNi(k-1)
(16)
式中,Nmax為最大引導速度;Ni(k-1)為上一次的引導移動;ωn∈[0,1]為兩次引導移動的慣性權重;αi(k)稱之為引導移動源,定義為
(17)

(3)隨機擴散
磷蝦群個體的隨機擴散運動定義為
(18)
式中,Dmax為最大擴散速度;δi(k)為隨機擴散方向,是位于[-1,1]區間的隨機數;K為最大迭代次數。
一般情況下,列車無電通過分相區,致使列車動力丟失較多,運行時間被延長[19],是影響運行時分的原因之一。現有高速列車ATO控制策略優化研究中,鮮有考慮列車惰行過分相區對優化結果的影響,使得結果偏離實際情況。將列車過分相區斷電惰行納入運行工況優化過程,研究更為準確、切合實際的高速列車ATO控制策略。
高速列車ATO控制策略優化算法實現步驟如下。
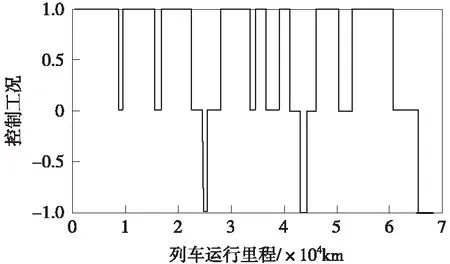
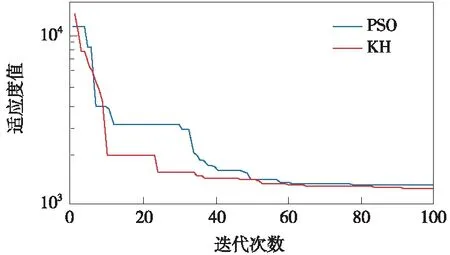
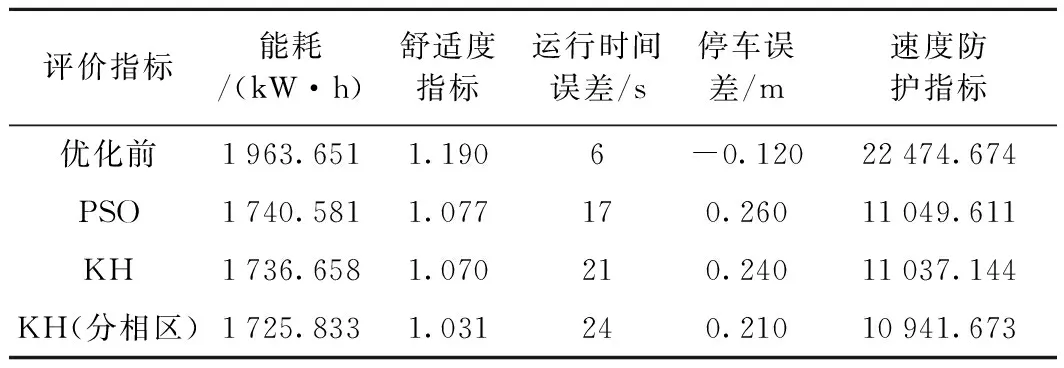
步驟1 在各分相區間隔內隨機生成與工況序列相對應的工況執行距離序列xi(0 步驟2 利用式(11)構造控制策略優化適應度函數,計算每個磷蝦適應度值,篩選出適應度值最小的磷蝦,作為當前迭代計算內的最優工況執行距離序列。 步驟3 更新磷蝦位置(分相區工況執行距離序列為不變值,剔除更新后在分相區內的序列,且每一次更新位置時需對工況執行距離序列重新排 序)。 步驟4 判斷算法是否終止,若終止則輸出最優工況執行距離序列和工況序列,否則轉至步驟3繼續執行。 以蘭新高速鐵路某67.67 km長線路為基礎數據,CRH5(5動3拖)動車組為仿真列車對所提算法進行仿真測試。列車參數見表1,列車回轉質量系數設為0.11[20],傳動效率設為0.9。 本文以Matlab為仿真平臺,在不考慮分相區和加入分相區后對KH算法進行仿真測試,并與優化前和用粒子群算法(PSO)優化后的結果進行對比分析。 表1 列車參數 圖2和圖3為優化前列車運行速度-距離曲線和控制工況序列。由圖2、圖3可知,列車以貼近線路限速的速度行駛,其運行工況在牽引、惰行與制動間頻繁切換。 圖2 優化前速度-距離曲線 圖3 優化前控制工況序列 在不考慮分相區情況下分別用KH算法和PSO算法對模型進行優化,其迭代次數與適應度值關系如圖4所示,可以看出,KH算法收斂效果優于PSO算法,且有較好的速度和精度。在迭代次數較少的情況下,KH算法可以得到比PSO算法更好的適應度值。因此選擇KH算法分別對考慮和未考慮分相區時進行控制策略優化,其結果如圖5所示。以第一個分相區(8 410 m處,下坡段)為例,從圖中可以看出,在不考慮分相區時,列車牽引通過,速度增加較快;考慮分相區時,列車惰行通過,速度增加較慢。 圖4 算法進化曲線 圖5 KH算法優化后的速度-距離曲線 圖6為考慮分相區時利用KH算法優化后的控制工況序列,其中“1”表示牽引工況,“0”表示惰行工況,“-1”表示制動工況。為了提高運行效率和減小區間運行時間,列車需反復進行牽引、惰行、制動工況間的切換,而優化后的控制序列其惰行里程增加,可以在不使用調速制動的情況下,充分利用列車動能和勢能,以較小能耗和更舒適的駕駛策略控制列車運行。 圖6 KH算法優化后的控制工況序列 優化結果比較如表2所示,可以看出優化前列車以最小時間策略運行,時間誤差較小,但運行能耗較大,且舒適性較差;用PSO算法和KH算法優化后較優化前其運行時間誤差偏大,但能耗有所減小,舒適性較好。在考慮分相區情況下,其運行時間誤差增大,但能耗進一步減小,舒適性更好,在列車實際駕駛過程中,一般采用斷電惰行過分相區,所以考慮分相區時優化結果更符合實際情況。 表2 高速列車ATO控制策略優化結果比較 高速列車ATO控制策略優化是一個多目標優化問題,因此可以在滿足固定運行時間裕量范圍內均衡各目標值得到較優的控制策略。以蘭新高速鐵路某區間線路為仿真數據進行優化求解,結果表明KH算法可以在較少的迭代次數下獲得較PSO算法更優的ATO控制策略,且優化精度更高,驗證了KH算法求解高速列車ATO控制策略的優越性。將有、無分相區時的兩種優化結果進行比較,表明分相區會對優化結果產生影響,驗證了在優化高速列車ATO控制策略時將列車過分相區斷電惰行納入運行工況的合理性。4 仿真及分析




5 結論
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
