基于地磁車輛檢測器的測速系統研究
2019-02-22 04:59:40李坤
測試技術學報 2019年1期
李 坤
(中國船舶重工集團公司第七一〇研究所,湖北 宜昌 443003)
0 引 言
當前國內外主流的車輛測速系統主要有地感線圈測速、視頻測速、雷達測速和地磁式車輛檢測器測速[1,2].
地感線圈測速是在道路上沿著車輛前進方向埋設兩個線圈,根據線圈間的距離和車輛經過線圈的時間差得出速度[3],該方法準確度高,但安裝線圈時會破壞路面,且線圈壽命一般較短[4]; 視頻測速是對攝像機拍攝的圖形進行圖像處理、目標檢測和跟蹤,從而計算出速度[5,6],這種方式在測速的同時可以記錄車輛違章的動態過程,記錄的信息最豐富,便于取證,缺點是視頻對使用環境要求很高[7],天氣變化會大大降低測速效果; 雷達測速主要是基于多普勒效應[8],當目標物體移動時,雷達發射的電磁波與經過物體反射后的電磁波會有頻率上的偏移,由頻率的改變數值,計算出目標與雷達的相對速度[9],雷達測速是在同一行車方向上安裝一個檢測點,當同一方向上并排行駛多個車輛時,雷達測速裝置無法分辨,容易出現漏檢或誤檢[10,11].
地磁式車輛檢測器測速是近年來出現的一種新型測速方式,基于磁阻傳感器的車輛檢測器可以準確檢測車輛的進入和離開,在道路中央沿著行車方向前后埋設兩個車輛檢測器,通過兩個車輛檢測器間的距離和車輛通過時的時間差,可以計算出速度[12,13]. 該地磁車輛檢測器測速系統體積小,成本低,安裝快捷,使用方便.
1 系統組成
測速系統主要由地磁車輛檢測器、中央控制器和應用系統組成,如圖 1 所示.

圖 1 測速系統組成Fig.1 Composition of the speed measuring system
在車道中央沿著行車方向間隔一定距離一前一后埋設兩個地磁式車輛檢測器,檢測器定時檢測車輛的進入和離開,并實時發送給中央控制器,中央控制器根據收到的信息計算出經過車輛的平均速度,發送給后端應用系統,可用于交通信息綜合管理平臺,超速抓拍,交通誘導等領域.
2 車輛速度檢測原理
如圖 1 所示,在車道中央沿著行車方向間隔一定距離的A點和B點,分別埋設1號和2號車輛檢測器,A點和B點間距離為LAB.
地磁式車輛檢測器是基于車輛經過引起磁場變化的原理進行探測車輛的,本系統中的車輛檢測器采用了兩兩正交的三軸磁場檢測,將三軸的磁場變化量的均方跟值與設定的閾值進行比較,從而判定有車還是無車,有車輸出1,無車輸出0,當有狀態變化時,車輛檢測器會實時地將狀態信息發送給中央控制器.
本系統使用的車輛檢測器采用的是浮動閾值自適應車輛檢測算法,車輛檢測器共有高低兩個閾值,檢測車輛由無到有時采用的是高閾值,而檢測車輛由有到無時采用的是低閾值,采用浮動閾值算法可以顯著提高車輛檢測的準確率. 目前國內外存在的車輛檢測器大多采用了單一的閾值,存在很大的弊端,當單一閾值設置的較高時,容易將出租車、公交車等中間部位鐵磁物質較少的車輛檢測成多輛,發生多檢; 當單一閾值設置的較低時,容易在相鄰車道有大車經過時誤觸發,產生多檢,或者在前后跟車很近時將其檢測成一輛,產生漏檢.

圖 2 某出租車經過雙檢測器時的信號示意圖Fig.2 Signal diagram of a taxi passing through a double detector
圖 2 為某出租車經過雙檢測器時的信號示意圖,車輛檢測器的高閾值為閾值1,低閾值為閾值2. 1號檢測器檢測到車輛進入時刻為t1進,車輛離開時刻為t1離,2號檢測器檢測到車輛進入時刻為t2進,車輛離開時刻為t2離. 由此可得車輛進入的時間差為式(1),車輛進入的平均速度為式(2).
Δt進=t2進-t1進,(1)
同理,車輛離開的時間差為式(3),車輛離開的平均速度為式(4).
Δt離=t2離-t1離,(3)
平均速度為
(5)
檢測器為了記錄車輛進入和離開的時刻需要有高精度的時鐘芯片,本系統中的車輛檢測器為了實現低功耗和節約硬件資源,沒有使用時鐘芯片,而以中央控制器內的高速定時器為時間基準,檢測器實時地將車輛進入和離開信息發送給中央控制器,中央控制器接收到1號檢測器發送的車輛進入信息后啟動計數器1開始計數,接收到1號檢測器發送的車輛離開信息后啟動計數器2開始計數,接收到2號檢測器發送的車輛進入信息后計數器1結束計數,接收到2號檢測器發送的車輛離開信息后計數器2結束計數,這樣同樣可以得到車輛進入和離開的時間差.
3 算法研究與實現
車輛進入的時間差和離開的時間差以及車速計算均在中央控制器端上進行. 車速檢測算法如圖 3 所示.
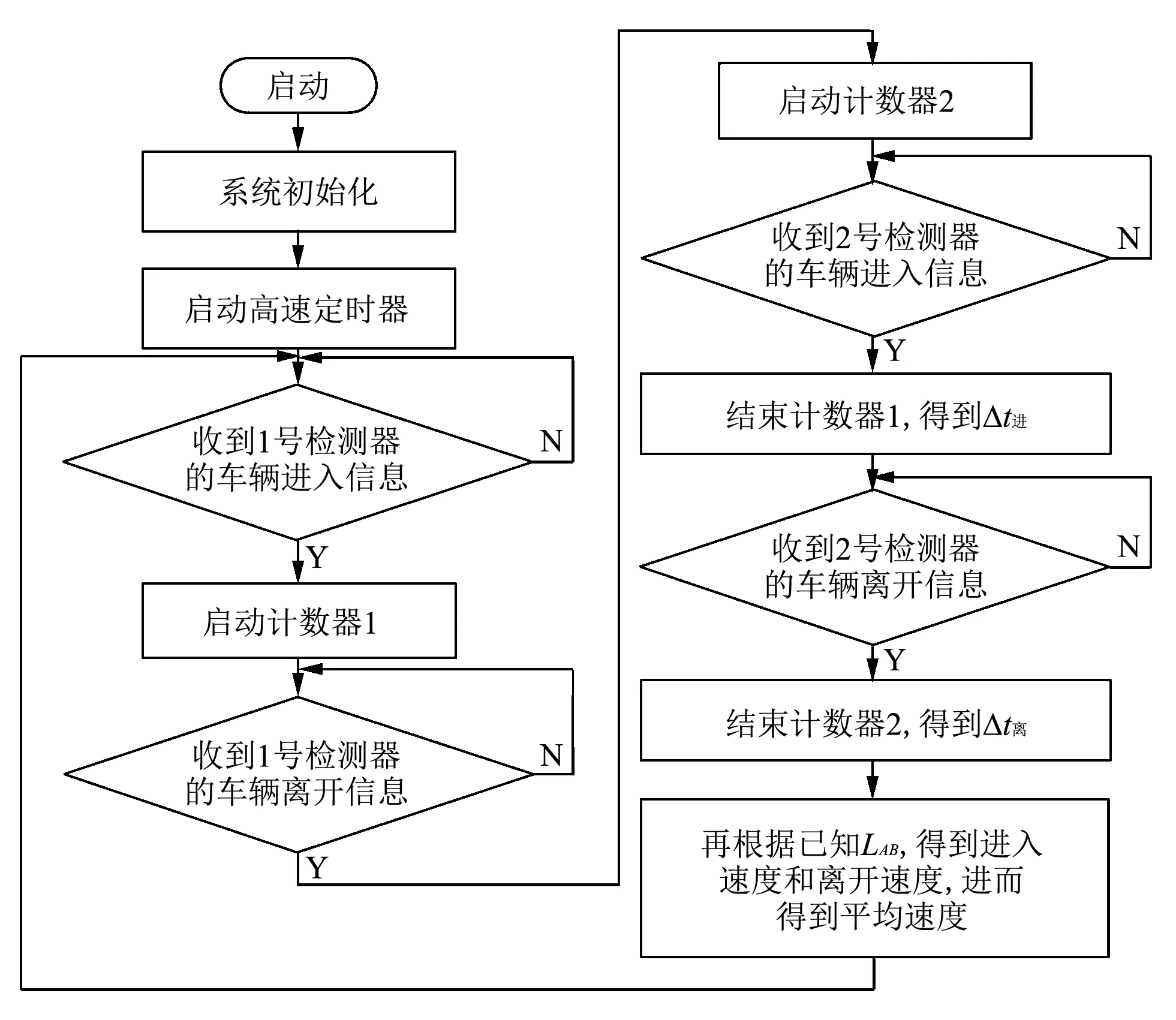
圖 3 車速檢測算法流程圖Fig.3 Vehicle speed detection algorithm flow chart
4 試驗結果與誤差分析
4.1 測速試驗
測速試驗中同時部署了兩組測速系統,每組測速系統中前后車輛檢測器的間隔為6 m,車輛檢測器采樣頻率為10 Hz.
測速試驗的實際車速、測量車速和誤差見表 1,其中實際車速為車輛儀表盤上顯示的車速. 兩組測速系統,共42組測試數據,最大誤差為23.33%,誤差絕對值的平均值為5.49%,最大誤差較大,平均絕對誤差較小.
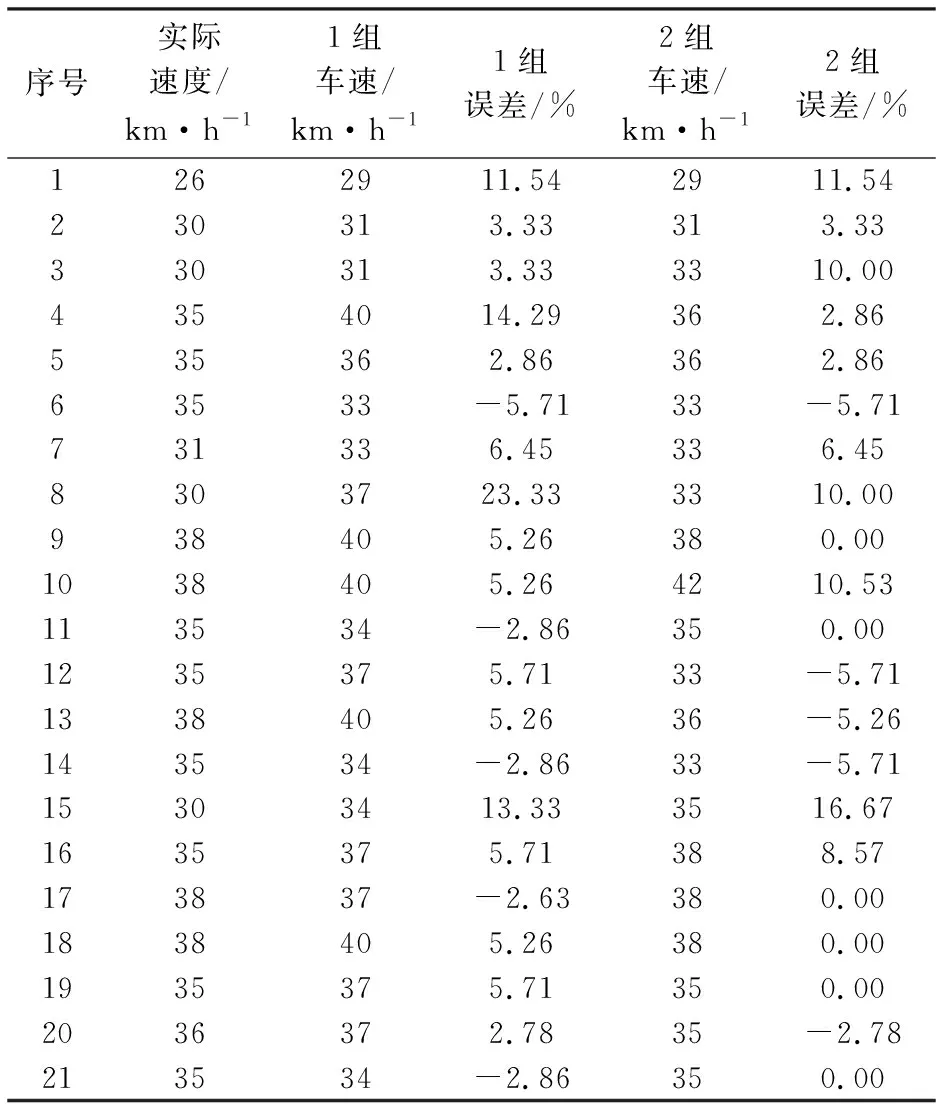
表 1 測速試驗的詳細數據
4.2 超速抓拍試驗
超速抓拍試驗中部署了一組測速系統,前后車輛檢測器間隔為6 m,采樣頻率10 Hz,當車速超過60 km/h時,啟動高清相機進行抓拍. 測試車輛速度約為70 km/h,如圖 4 所示.
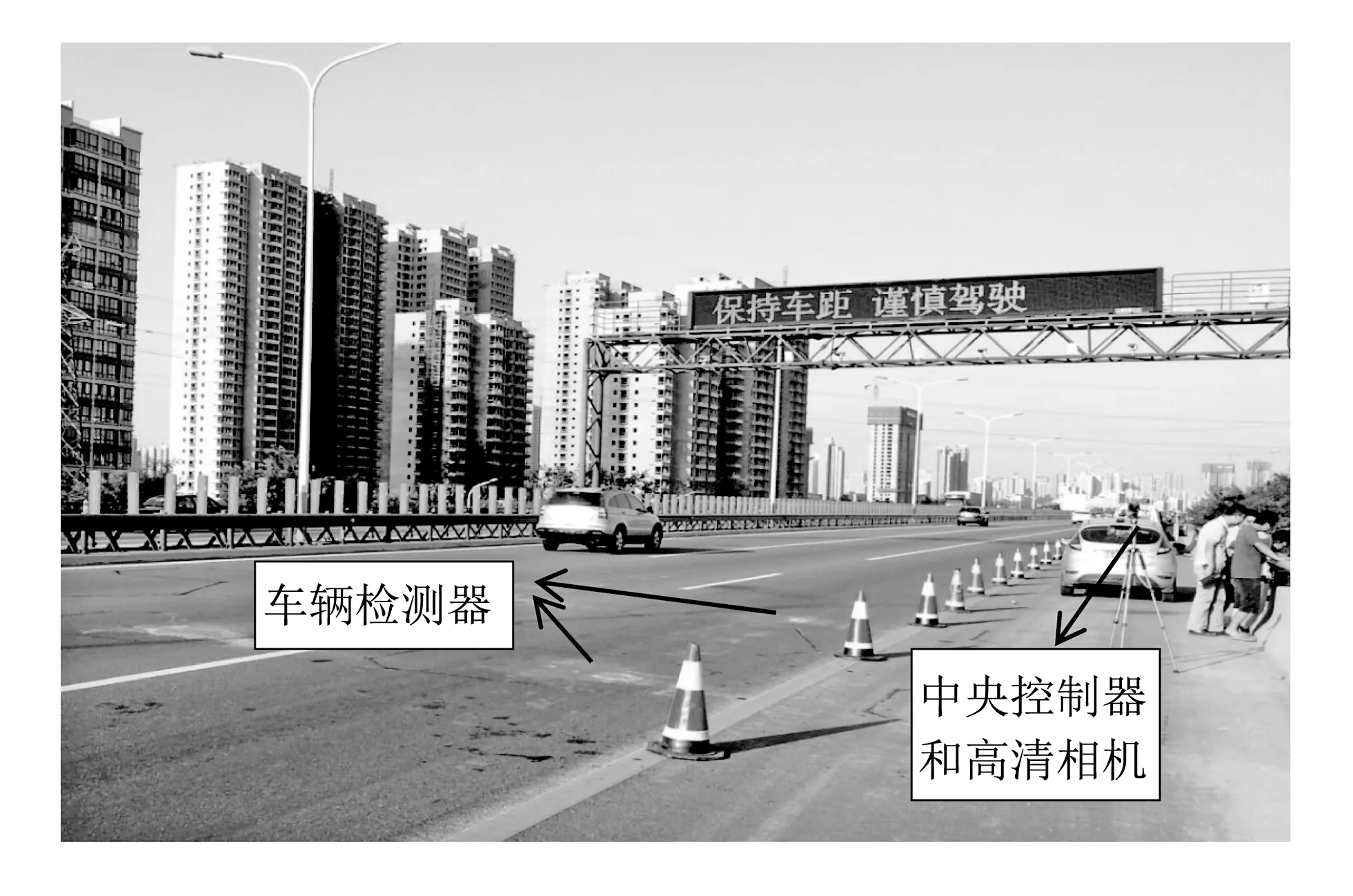
圖 4 超速抓拍測試現場Fig.4 Speed capture test site
進行了多組超速抓拍試驗,每次均能正常啟動抓拍,如圖 5 所示. 但從圖 5 中可以看出抓拍的位置不同,一致性有待提高.

圖 5 超速抓拍結果Fig.5 Result of Speed capture
4.3 試驗結果分析
通過測速試驗和超速抓拍試驗可以看出,該車輛測速系統的精度有待提高. 通過深入分析檢測原理可以發現影響測速精度的主要因素包括:車輛檢測器靈敏度、車輛檢測器采樣頻率、車輛檢測器到中央控制器的無線信號傳輸延時和兩個車輛檢測器之間的距離.
4.3.1 車輛檢測器靈敏度

(6)

理想的進入平均速度、離開平均速度分別為
(8)
平均速度為

由此可見,車輛傳感器所使用的磁阻傳感器的靈敏度差異以及安裝的方向高度等差異都會帶來測速的誤差. 為了提高測速精度,應盡量選擇一致性好的磁阻傳感器,車輛檢測器安裝的方向和高度也應盡量一致.
4.3.2 車輛檢測器采樣頻率

(11)
理想的進入平均速度、離開平均速度分別為
(13)
平均速度為
偏差影響因子在-1到1的范圍內是隨機的,由式(15)可見采樣頻率越大,誤差越小. 為了提高測速精度,應提高采樣頻率.
4.4 改進措施
由4.3.2的分析可知,為了提高測速精度,應盡量選擇一致性好的磁阻傳感器,車輛檢測器安裝的方向和高度也應盡量一致,車輛檢測器的采樣頻率也應盡量高. 為了避免無線信號傳輸上的延時差異造成的測速誤差,可在每個車輛檢測器上設計時鐘電路,并定期進行時鐘同步[7],車輛檢測器發送給中央控制器的信號自帶時間信息,由式(1)和式(3)確定進入時差和離開時差. 此外,增加A,B點間的距離,也能減小靈敏度和采樣頻率帶來的誤差.
5 結 論
本文研究了基于地磁車輛檢測器的測速系統,與當前存在的其他常用測速系統進行了對比,明確了基于地磁車輛檢測器的測速系統的優勢,并進行了測速試驗和超速抓拍試驗,實驗結果證明了該測速系統的有效性,通過對測速誤差進行理論分析,提出了改進措施,下一步研究工作將是提高測速精度,使該系統具有更大的應用價值.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34