無人水面艇自主導(dǎo)航技術(shù)
2019-02-27 06:59:22胡常青何遠(yuǎn)清文龍貽彬楊義勇
導(dǎo)航與控制 2019年1期
胡常青,朱 瑋,何遠(yuǎn)清,文龍貽彬,楊義勇
(1.中國地質(zhì)大學(xué)(北京)工程技術(shù)學(xué)院,北京100083;2北京航天控制儀器研究所,北京100039;3.青島海洋科學(xué)與技術(shù)試點(diǎn)國家實(shí)驗(yàn)室,青島266237)
0 引言
無人水面艇(Unmanned Surface Vehicle,USV)(簡稱無人艇)是一種具有自主航行、自動(dòng)作業(yè)能力的水面平臺(tái),通過搭載不同的任務(wù)載荷完成不同任務(wù),尤其適用于執(zhí)行危險(xiǎn)、枯燥及不適于有人船只任務(wù)執(zhí)行的場合。相比于常規(guī)有人船,它具有作業(yè)成本低、能夠完成淺灘/近岸等復(fù)雜海域的作業(yè)任務(wù)、環(huán)境適應(yīng)性強(qiáng)、全天時(shí)等特點(diǎn)。在民用方面,可以用于測繪、勘探、環(huán)保監(jiān)測、安防巡邏等領(lǐng)域。在軍事方面,可用于排雷、探潛、電子對抗、偵察等領(lǐng)域。
無人艇自主導(dǎo)航技術(shù)是指根據(jù)作業(yè)區(qū)域已知的地圖信息,利用無人艇自帶的導(dǎo)航和環(huán)境感知等多傳感器獲得的實(shí)時(shí)信息,制訂航行路徑并根據(jù)現(xiàn)場障礙物信息實(shí)時(shí)調(diào)整,完成預(yù)定的作業(yè)任務(wù)。自主導(dǎo)航技術(shù)可分為導(dǎo)航定位技術(shù)和路徑規(guī)劃技術(shù)。導(dǎo)航定位技術(shù)是指無人艇通過搭載的導(dǎo)航設(shè)備精確獲得無人艇自身的位置、速度、姿態(tài)等航行信息,是實(shí)現(xiàn)無人艇水面自主航行的前提。無人艇導(dǎo)航定位不僅要求位置精確,而且還要求其具備可靠性和抗干擾能力。路徑規(guī)劃技術(shù)則是通過綜合考慮無人艇作業(yè)任務(wù)效率、航行約束條件與水面航行環(huán)境,進(jìn)行全局或局部路徑規(guī)劃,保障無人艇水面高效、安全航行,是水面航行智能化水平的關(guān)鍵。
在實(shí)際航行和作業(yè)過程中,長時(shí)間航行和復(fù)雜海況給無人艇的自主導(dǎo)航帶來很大挑戰(zhàn)。長時(shí)間航行對導(dǎo)航精度和可靠性要求很高,復(fù)雜海況表現(xiàn)為惡劣的自然氣候環(huán)境,對導(dǎo)航設(shè)備的實(shí)時(shí)、連續(xù)、穩(wěn)定、可靠工作帶來影響。另外,海浪對雷達(dá)、視覺傳感器和水下避障聲吶等傳感器的正常工作也會(huì)產(chǎn)生影響。復(fù)雜海況還表現(xiàn)為錯(cuò)綜復(fù)雜的周邊態(tài)勢,例如:港口中密集的船只,水下不可預(yù)知的淺灘、水草、漁網(wǎng)等。如何可靠識(shí)別障礙物并制訂安全的航路,給無人艇的自主導(dǎo)航帶來了很大挑戰(zhàn)。圖1和圖2為復(fù)雜海況的不同表現(xiàn)。
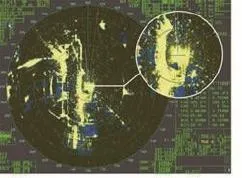
圖1 干擾下雷達(dá)成像圖Fig.1 Diagram of radar imaging under interference

圖2 復(fù)雜的港口及航道Fig.2 Ports and waterways under heavy traffic
1 無人艇導(dǎo)航定位技術(shù)
在不同的任務(wù)階段,無人艇對導(dǎo)航定位精度的要求也不同。當(dāng)無人艇進(jìn)出港口或靠岸停泊時(shí),導(dǎo)航定位精度需要達(dá)到分米級(jí),一般的導(dǎo)航定位手段無法滿足需求,還需要借助環(huán)境感知系統(tǒng)對當(dāng)前周圍環(huán)境進(jìn)行識(shí)別和判斷,完成精確導(dǎo)航定位。按照GB50139?2014航道通航標(biāo)準(zhǔn),不同等級(jí)航道的要求不一樣,其對無人艇航行時(shí)定位和航跡保持精度的要求也不一樣。當(dāng)無人艇隨母船遠(yuǎn)海作業(yè)時(shí),還面臨在自動(dòng)布放回收過程中與母船高精度的相對位置定位問題。
傳統(tǒng)的慣性導(dǎo)航具有信息全面實(shí)時(shí)與連續(xù)、完全自主、不受地域限制和人為因素干擾等重要特性,但它的導(dǎo)航誤差會(huì)隨時(shí)間積累,且成本相對較高。衛(wèi)星導(dǎo)航技術(shù)相對成熟并在各領(lǐng)域得到了廣泛應(yīng)用,但它易受干擾和誘騙,進(jìn)而易影響水面航行的作業(yè)效率和安全。
不同的導(dǎo)航方式有各自的優(yōu)缺點(diǎn),因此,與無人機(jī)、無人車類似,將慣性導(dǎo)航與衛(wèi)星導(dǎo)航、其他導(dǎo)航方式結(jié)合起來的組合導(dǎo)航已成為無人艇導(dǎo)航定位的主要方式,如圖3所示。
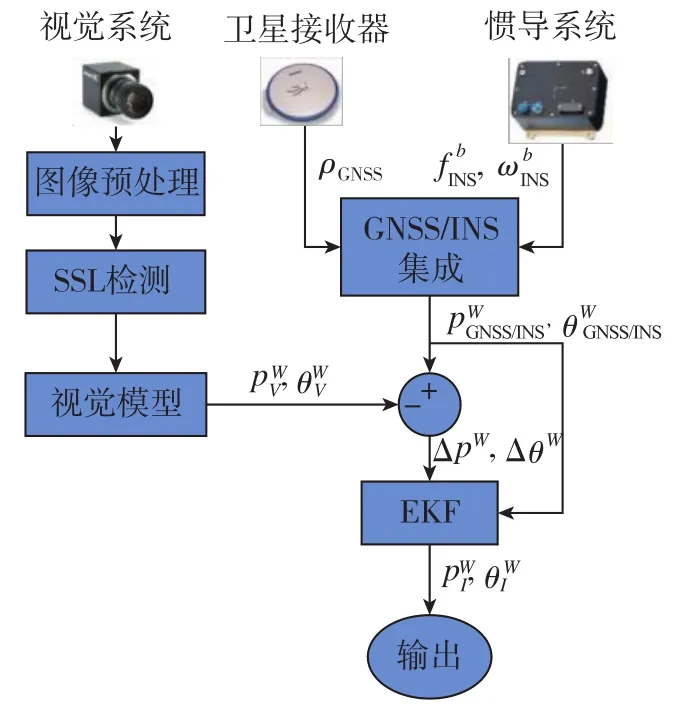
圖3 GNSS/慣導(dǎo)/景象匹配組合導(dǎo)航Fig.3 GNSS/INS/image matching integrated navigation
1.1 即插即用全源組合導(dǎo)航技術(shù)
從實(shí)用性和經(jīng)濟(jì)性考慮,目前無人艇以衛(wèi)星/慣性組合導(dǎo)航為基礎(chǔ)導(dǎo)航,再根據(jù)在不同的作業(yè)場景中使用的傳感器進(jìn)行不同導(dǎo)航信息誤差的修正,實(shí)現(xiàn)即插即用導(dǎo)航功能,如圖4所示。目前,典型的組合方式有以下幾類:
1)捷聯(lián)慣性/衛(wèi)星組合系統(tǒng)是目前最基礎(chǔ)的一種導(dǎo)航系統(tǒng)配置。軍用無人艇考慮到安全性和高可靠性,且有時(shí)需要為搭載的魚雷、低空導(dǎo)彈、自動(dòng)武器站等任務(wù)設(shè)備提供高精度局部基準(zhǔn),一般需采用高精度慣性導(dǎo)航設(shè)備與衛(wèi)星導(dǎo)航設(shè)備組成組合導(dǎo)航系統(tǒng)。民用無人艇搭載的設(shè)備數(shù)量和種類不多,考慮到經(jīng)濟(jì)性,采用MEMS或低精度光學(xué)陀螺慣性導(dǎo)航設(shè)備與衛(wèi)星導(dǎo)航進(jìn)行組合。
2)地磁/重力場等地球物理信息匹配導(dǎo)航具有無積累誤差的特點(diǎn),可以用此信息對無人艇位置誤差進(jìn)行不定期的修正。目前,重力、地磁匹配定位受模型分辨率、測量精度等因素的制約,只能達(dá)到百米級(jí)定位精度。美國國防部研制的純地磁導(dǎo)航系統(tǒng)的地面和空中定位精度可達(dá)到30m。
3)地形或景象匹配組合技術(shù)是進(jìn)一步提高系統(tǒng)導(dǎo)航位置精度的重要手段。在無人艇已經(jīng)獲得分辨率較高的電子海圖和水下地形圖的情況下,地形匹配導(dǎo)航可以達(dá)到較高的定位精度。
4)無人艇還可以結(jié)合艇上配備的相關(guān)載荷設(shè)備進(jìn)行輔助導(dǎo)航。其中,水聲 Doppler測速儀(DVL)測速誤差小、精度高,將其與低精度慣性導(dǎo)航設(shè)備進(jìn)行組合,可以彌補(bǔ)慣性導(dǎo)航設(shè)備精度隨時(shí)間降低的問題。對于因載體轉(zhuǎn)彎、側(cè)滑造成的DVL粗差,可以利用無人艇搭載的水下側(cè)掃聲吶圖像數(shù)據(jù)或水面的光學(xué)設(shè)備圖像數(shù)據(jù)推算出無人艇側(cè)向速度,檢測并剔除DVL側(cè)向速度粗差,從而改善組合導(dǎo)航性能。針對由航向誤差導(dǎo)致的航位推算誤差增大的問題,可以利用光電設(shè)備的海天線成像信息獲得的無人艇姿態(tài)信息來修正低精度慣性導(dǎo)航設(shè)備的姿態(tài)誤差。
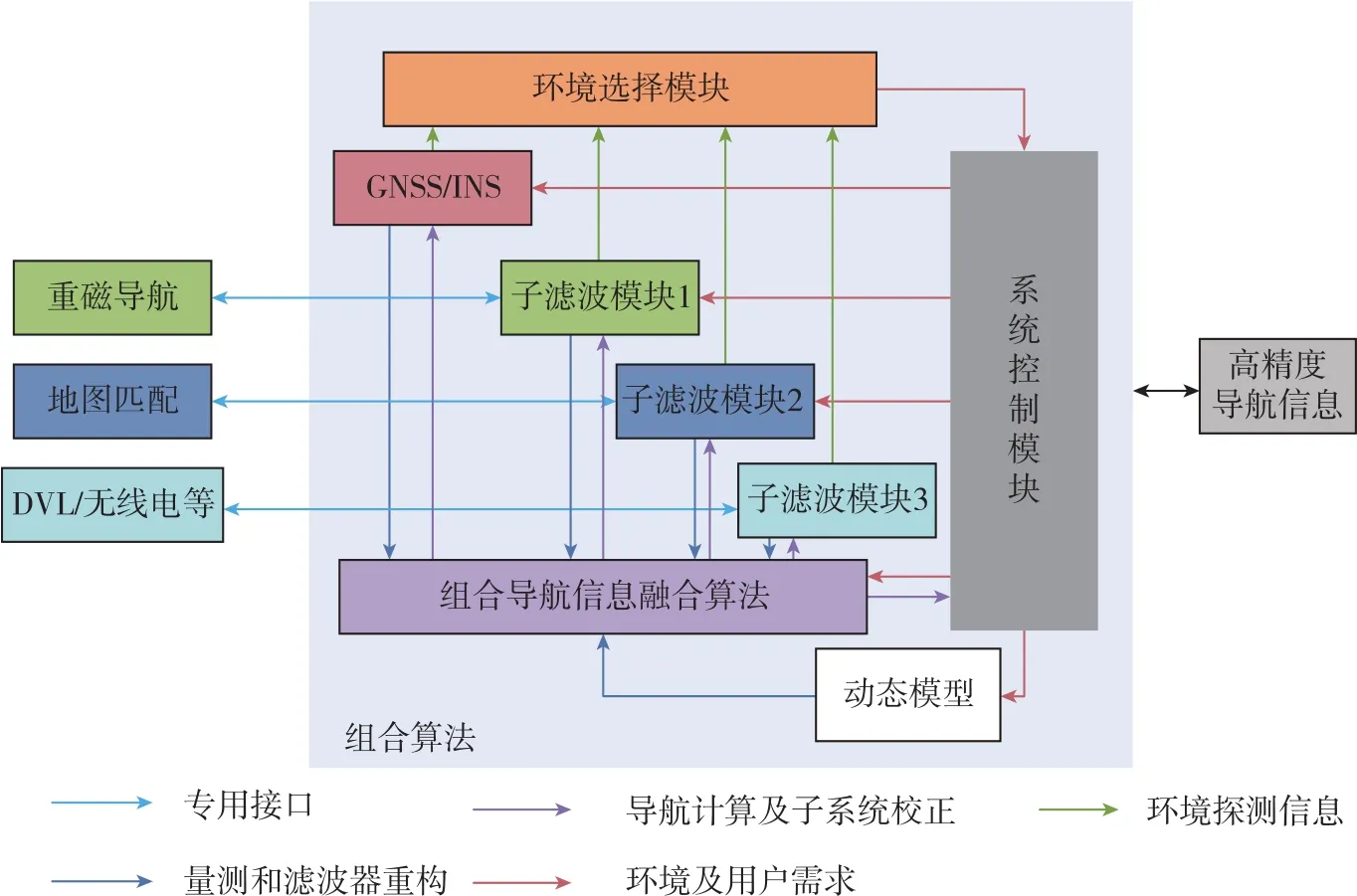

圖4 無人艇即插即用組合導(dǎo)航技術(shù)Fig.4 Plug-and-play integrated navigation of USV
1.2 組合導(dǎo)航完好性監(jiān)測技術(shù)
無人艇在復(fù)雜水面航行條件下,存在外部欺騙的問題,且基于多傳感器的導(dǎo)航系統(tǒng)容易產(chǎn)生故障信息。因此,組合導(dǎo)航完好性監(jiān)測技術(shù)也逐漸從最開始的航空領(lǐng)域被應(yīng)用到了無人艇的航海領(lǐng)域。
水面組合導(dǎo)航完好性監(jiān)測技術(shù)是通過建立導(dǎo)航系統(tǒng)誤差完好性風(fēng)險(xiǎn)模型,提高系統(tǒng)在欺騙式干擾及惡劣水面環(huán)境下的系統(tǒng)故障檢測與排除概率,改善組合導(dǎo)航系統(tǒng)的完好性監(jiān)測性能,確保當(dāng)系統(tǒng)的導(dǎo)航精度超出給定航行階段所要求的特定區(qū)間時(shí),系統(tǒng)能及時(shí)發(fā)現(xiàn)故障并告警,如圖5所示。
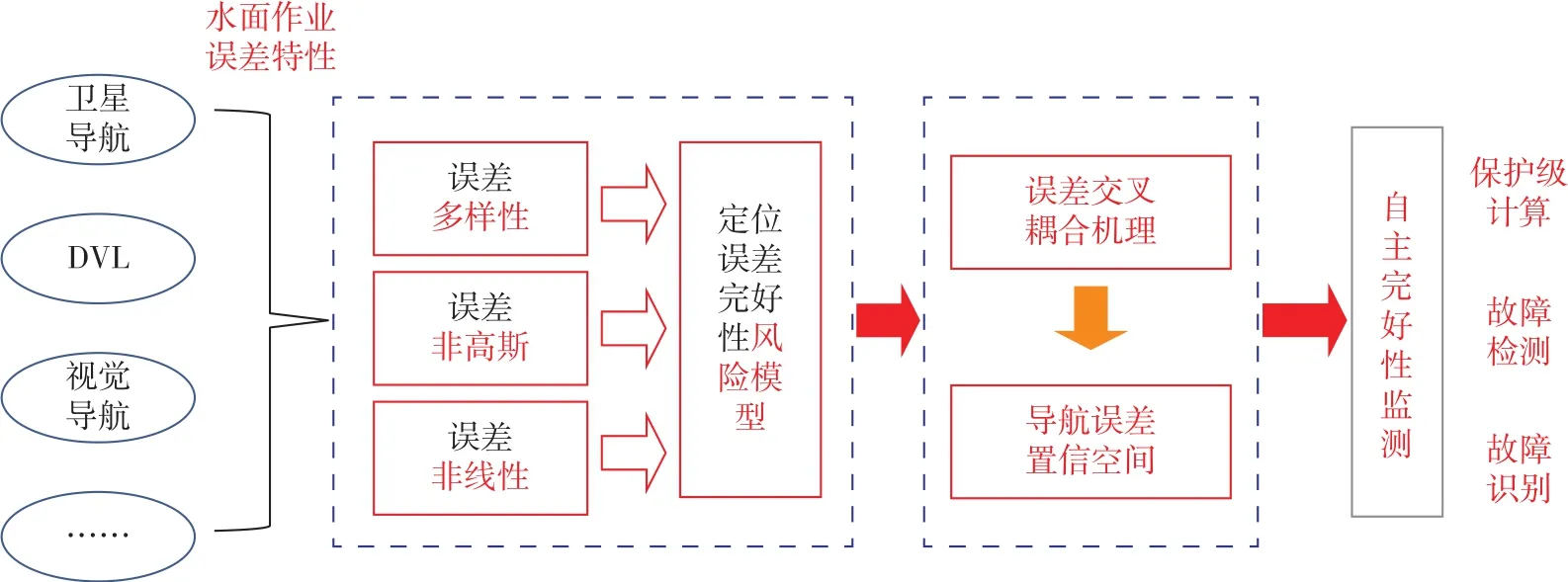
圖5 無人艇導(dǎo)航完好性簡化采樣模型Fig.5 Simplified sampling model of navigation integrity monitoring for USV
采用松/緊組合結(jié)構(gòu)、完好性監(jiān)測算法和一些故障檢測算法,在基于輔助的RAIM算法的基礎(chǔ)上增加外部輔助設(shè)備(如慣性導(dǎo)航系統(tǒng)、DVL等)以提高完好性監(jiān)測性能,不僅增加了檢測系統(tǒng)的故障靈敏度,而且改善了捕獲故障的能力,從而顯著提高了組合導(dǎo)航系統(tǒng)的整體可靠性和準(zhǔn)確性。
1.3 協(xié)同導(dǎo)航技術(shù)
在復(fù)雜海況下,許多任務(wù)需要多艘無人艇協(xié)同作業(yè)才能夠完成。近年來,越來越多的學(xué)者和研究機(jī)構(gòu)開展了針對多無人艇協(xié)同作業(yè)的研究,協(xié)同導(dǎo)航技術(shù)可以有效地提高復(fù)雜海況下單一無人艇的導(dǎo)航定位精度和可靠性。協(xié)同導(dǎo)航技術(shù)需要構(gòu)建包括岸基基站、有人艇、無人艇、無人機(jī)、無人潛航器在內(nèi)的海陸空天一體化通信網(wǎng)絡(luò),通過各節(jié)點(diǎn)間的相對定位,將單無人系統(tǒng)自身信息和其他無人系統(tǒng)的信息進(jìn)行融合來提高定位精度,實(shí)現(xiàn)復(fù)雜海況下無人艇的協(xié)同導(dǎo)航。
對于無人艇的協(xié)同導(dǎo)航技術(shù),目前研究得比較多的是主從式無人/有人艇群的協(xié)同導(dǎo)航技術(shù)。如圖6所示,它是使配備較低精度導(dǎo)航設(shè)備的無人艇USV2將其自身的信息和配備高精度導(dǎo)航設(shè)備的領(lǐng)航艇USV1(或是有人母艦艇)的信息進(jìn)行融合來提高其導(dǎo)航精度。針對主從式多無人艇系統(tǒng)中存在多領(lǐng)航艇和單領(lǐng)航艇兩種協(xié)同導(dǎo)航定位方法,關(guān)鍵是需精確測量出領(lǐng)航艇與跟隨艇之間的相對距離,這方面主要工作集中于對UKF、EKF等導(dǎo)航濾波算法的研究,以及采用信息重建的狀態(tài)估計(jì)、最小方差等方法來補(bǔ)償聲速誤差、時(shí)延。

圖6 主從式無人艇協(xié)同導(dǎo)航Fig.6 Cooperative navigation of master-slave USVs
跨域異構(gòu)平臺(tái)間的協(xié)同導(dǎo)航包括無人機(jī)與無人艇協(xié)同導(dǎo)航,以及無人艇與無人潛航器協(xié)同導(dǎo)航。此時(shí),協(xié)同導(dǎo)航主要利用不同導(dǎo)航系統(tǒng)的誤差特性,構(gòu)建信息雙向融合濾波器,同步修正兩者的導(dǎo)航信息誤差,提高各自無人系統(tǒng)的定位與航向精度,并提高導(dǎo)航的可靠性。例如,無人潛航器、無人艇或無人機(jī)可以利用各自獲得的較為精確的地球物理信息匹配導(dǎo)航結(jié)果,來互相修正和補(bǔ)充,以提高導(dǎo)航的精度和可靠性,如圖7所示。美國的諾斯羅普?格魯曼公司已開發(fā)了一種全新的無人系統(tǒng)控制架構(gòu)。在該架構(gòu)下,無人艇與無人潛航器通過水聲通信完成協(xié)同定位,無人艇與無人機(jī)使用微波通信自組網(wǎng)完成協(xié)同定位。
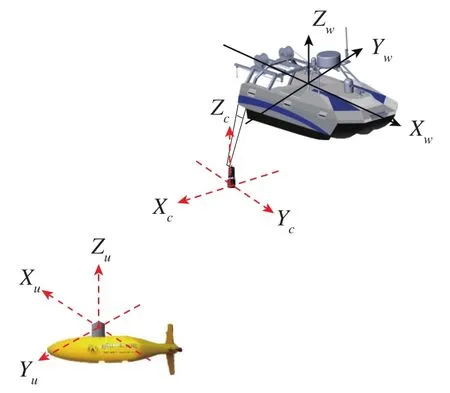
圖7 無人艇與無人潛航器協(xié)同導(dǎo)航Fig.7 Cooperative navigation of USV-UUV
2 無人艇路徑規(guī)劃技術(shù)
無人艇路徑規(guī)劃技術(shù)是指綜合考慮自身航行性能、作業(yè)效率和水面航行環(huán)境,尋找一條滿足預(yù)期要求的路徑,并使無人艇在航行過程中安全地繞過所有障礙物。無人艇的路徑規(guī)劃算法可分為全局路徑規(guī)劃算法和局部路徑規(guī)劃算法。
全局路徑規(guī)劃是基于已知的海圖信息和航區(qū)內(nèi)障礙物、危險(xiǎn)區(qū)域信息等構(gòu)建適當(dāng)?shù)沫h(huán)境模型,根據(jù)需求從環(huán)境模型中搜索出一條滿足需求的安全路徑,如圖8所示。全局路徑規(guī)劃的第一步是要建立環(huán)境模型,常用的環(huán)境模型構(gòu)建方法主要有幾何法、柵格法、構(gòu)形空間法、可視圖法、拓?fù)浞ê透怕屎桔E圖法等。但上述方法都有著各自的優(yōu)缺點(diǎn):可視圖法減小了搜索范圍但不夠靈活,不適用于存在圓形障礙物的空間;拓?fù)浞ń档土烁呔S空間的規(guī)劃難度,但網(wǎng)絡(luò)的建立過程復(fù)雜;柵格法易于實(shí)現(xiàn),但只適用于一致性空間。因此,在實(shí)際情況中需要根據(jù)真實(shí)環(huán)境條件選擇不同方法。環(huán)境模型建立后,到達(dá)最終目標(biāo)點(diǎn)需要相應(yīng)的路徑規(guī)劃算法,如貪婪算法、A星算法、Dijkstr算法等。基于不同的環(huán)境表示,有不同的路徑搜索算法。同時(shí),環(huán)境建模對搜索算法的效率也有很大的影響。因此,為了得到一條最優(yōu)的全局路徑,可以改進(jìn)環(huán)境建模方法或改進(jìn)路徑規(guī)劃算法,但更重要的是要把兩者結(jié)合起來考慮。如圖9所示,基于柵格法和A星算法提出的theta star方法既適用于非一致空間(最小轉(zhuǎn)角可以不是45°),也有著比A星算法更佳的搜索效率。
復(fù)雜海況和良好海況下的環(huán)境模型完全不同,會(huì)導(dǎo)致環(huán)境感知算法難以適應(yīng)。同時(shí),當(dāng)在一些船只較多的主航道附近作業(yè)時(shí),如何制訂這些合作/非合作目標(biāo)避碰策略也是一個(gè)亟待解決的問題。在巡邏執(zhí)法或軍事應(yīng)用中,甚至還面臨非合作、對抗目標(biāo),這就給局部路徑規(guī)劃帶來了較大的挑戰(zhàn)。無人艇局部路徑規(guī)劃算法需要根據(jù)環(huán)境感知系統(tǒng)實(shí)時(shí)測量周圍環(huán)境中的信息,動(dòng)態(tài)地調(diào)整、修正局部路徑,確保無人艇在航行過程中的安全。當(dāng)前常用的Bug算法、人工勢場法、動(dòng)態(tài)窗口方法、曲率速度方法、Dstar算法等局部路徑規(guī)劃算法有著各自的優(yōu)缺點(diǎn):人工勢場法容易陷入局部極值點(diǎn);Bug算法效率低,返回原有路徑的方式較為原始;動(dòng)態(tài)窗口法考慮了無人艇的運(yùn)動(dòng)約束,能夠較好地滿足局部路徑規(guī)劃的需求,但是要耗費(fèi)大量時(shí)間進(jìn)行調(diào)參;Dstar算法實(shí)時(shí)性強(qiáng),但不能快速返回原有路徑。

圖8 路徑規(guī)劃示意圖Fig.8 Diagram of path planning
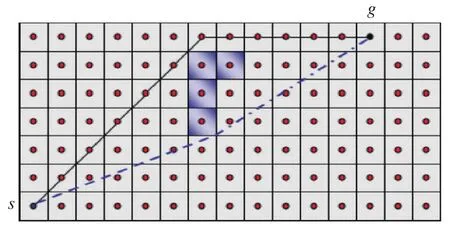
圖9 theta star算法(虛線)與Astar算法(實(shí)線)Fig.9 Comparison of theta star algorithm(dotted lines)and Astar algorithm(solid lines)
由于全局和局部路徑規(guī)劃方法各自存在局限性,兩種方法都無法滿足無人艇在復(fù)雜海況下的航行要求。因此,自適應(yīng)智能路徑規(guī)劃技術(shù)是解決復(fù)雜海況下的路徑規(guī)劃問題的一種可行方法。
2.1 自適應(yīng)智能路徑規(guī)劃
自適應(yīng)智能路徑規(guī)劃技術(shù)利用多傳感器信息融合技術(shù)獲取水上、水下障礙物信息,將無人艇導(dǎo)航信息及外界環(huán)境風(fēng)浪流信息結(jié)合電子海圖的地圖信息,采用分層策略,自適應(yīng)地調(diào)整路徑算法和路徑規(guī)劃算法參數(shù),動(dòng)態(tài)規(guī)劃無人艇的航行路徑,以適應(yīng)復(fù)雜的水面環(huán)境,如圖10所示。
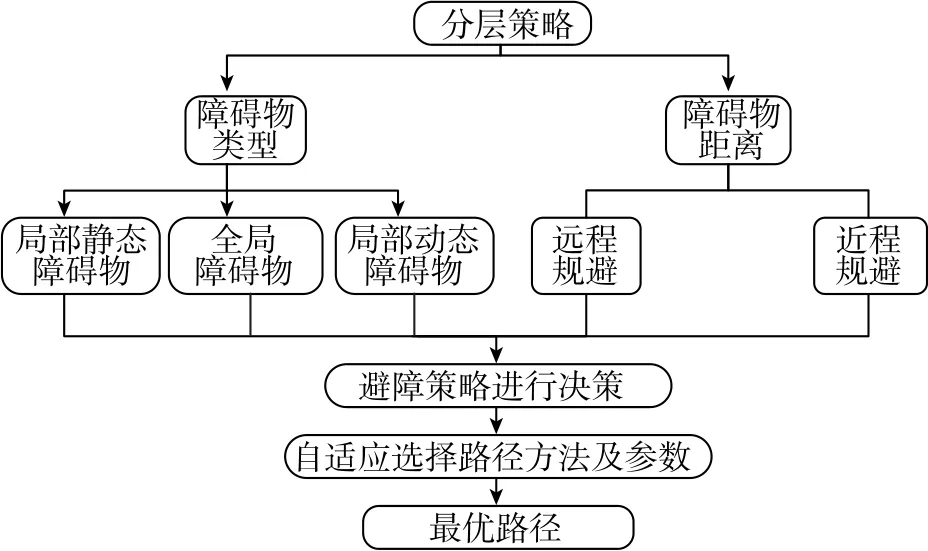
圖10 自適應(yīng)智能路徑規(guī)劃技術(shù)示意圖Fig.10 Schematic diagram of adaptive intelligent path planning technology
根據(jù)檢測到的障礙物類型的不同,將障礙物分成全局障礙物與局部障礙物,及靜態(tài)障礙物與動(dòng)態(tài)障礙物。針對障礙物的類型特點(diǎn),采用分層思想,自適應(yīng)地選用路徑規(guī)劃算法與避障方案,以適應(yīng)無人艇復(fù)雜多變的航行環(huán)境。其主要避碰策略為:利用柵格法、幾何法等方法建立環(huán)境模型,并根據(jù)障礙物信息及相關(guān)約束條件(航行規(guī)則、航行時(shí)間或能耗等)建立不同層次的路徑(全程、遠(yuǎn)程、近程、應(yīng)急),在航行過程中根據(jù)獲取的實(shí)時(shí)動(dòng)態(tài)的障礙物信息選擇規(guī)避方式。當(dāng)運(yùn)動(dòng)障礙物的信息數(shù)據(jù)不能被有效獲取時(shí),采用應(yīng)急危險(xiǎn)規(guī)避方式,使無人艇在密集障礙物的環(huán)境下能夠自主避障。
2.2 智能環(huán)境感知技術(shù)
在無人艇局部路徑規(guī)劃中,重要的是能夠?qū)崟r(shí)感知航行區(qū)域周邊的環(huán)境態(tài)勢。由于水面環(huán)境的復(fù)雜性,單一的傳感器環(huán)境感知技術(shù)不能適應(yīng)復(fù)雜海況,容易受到天氣、距離、傳感器自身分辨率等因素的影響,產(chǎn)生較大誤差甚至不能工作。這時(shí),需要利用無人艇上搭載的電子海圖、光學(xué)設(shè)備、導(dǎo)航雷達(dá)、前視聲吶等多種傳感器,來彌補(bǔ)單一傳感器在復(fù)雜海況下的局限性,獲取障礙物的三維立體信息,如圖11所示。但使用多傳感器,需要解決如何從探測收集到的大量既有重疊性又有互補(bǔ)性的環(huán)境數(shù)據(jù)中提取有用的信息,從而正確、可靠地進(jìn)行環(huán)境感知的問題。隨著人工智能技術(shù)的發(fā)展,將傳統(tǒng)方法與基于神經(jīng)網(wǎng)絡(luò)和數(shù)據(jù)融合的深度學(xué)習(xí)技術(shù)相結(jié)合,利用深度挖掘與智能融合技術(shù),可以不斷提高目標(biāo)檢測率且能夠更加充分地挖掘信息,從而獲得更好的環(huán)境感知與目標(biāo)識(shí)別的效果。近年來以深度學(xué)習(xí)為代表,結(jié)合神經(jīng)網(wǎng)絡(luò)、數(shù)據(jù)融合的人工智能技術(shù)在環(huán)境感知上得到了廣泛應(yīng)用與發(fā)展,相比于傳統(tǒng)方法,其具有適應(yīng)性強(qiáng)、精度高、感知能力強(qiáng)的特點(diǎn)。
一方面,使用深度學(xué)習(xí)技術(shù)可以多重組合學(xué)習(xí)底層信息,然后利用多層感知器逐層壓縮,發(fā)現(xiàn)單一傳感器數(shù)據(jù)的本質(zhì)特征表述,能夠提高識(shí)別和分類的準(zhǔn)確性。通過提取不同目標(biāo)的幾何特征、不變矩特征和紋理特征,采用基于組合特征和主分量分析降維的分級(jí)BP神經(jīng)網(wǎng)絡(luò)進(jìn)行目標(biāo)識(shí)別,能較有效實(shí)現(xiàn)無人艇視覺系統(tǒng)對海面3大類常見目標(biāo)的分類識(shí)別,識(shí)別正確率達(dá)到85%以上。
另一方面,使用深度學(xué)習(xí)、數(shù)據(jù)融合等算法來充分挖掘多元異構(gòu)數(shù)據(jù)間的有效信息,挖掘現(xiàn)有方法無法觸及的特征信息,能夠提高系統(tǒng)對環(huán)境信息的利用率和環(huán)境感知能力,從而構(gòu)建一個(gè)信息全面、立體、可靠的無人艇三維環(huán)境模型,讓無人艇在復(fù)雜多變的環(huán)境中快速高效地完成任務(wù)。
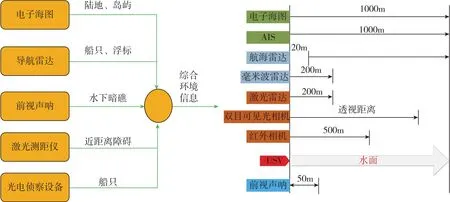
圖11 環(huán)境感知與信息融合Fig.11 Block diagram of environment perception and information fusion
3 總結(jié)與展望
綜上,將無人艇自主導(dǎo)航技術(shù)后續(xù)發(fā)展趨勢分析如下:
1)即插即用全源導(dǎo)航是無人艇導(dǎo)航發(fā)展的趨勢。無人艇以衛(wèi)星/慣性組合導(dǎo)航為基礎(chǔ)導(dǎo)航,再根據(jù)在不同的作業(yè)場景中使用的傳感器進(jìn)行不同導(dǎo)航信息誤差的修正,如完整重磁等地球物理信息和地形或景象信息對位置誤差的修正,DVL測量信息對系統(tǒng)速度誤差的校正,并可根據(jù)不同場景變換快速移除引入的測量節(jié)點(diǎn),以降低系統(tǒng)的計(jì)算量。
2)綜合環(huán)境約束和無人艇的幾何約束、物理約束獲得全局最優(yōu)路徑將是后續(xù)研究重點(diǎn)。全局路徑規(guī)劃算法將逐漸從單目標(biāo)規(guī)劃最優(yōu)向多目標(biāo)規(guī)劃綜合最優(yōu)轉(zhuǎn)變,許多最優(yōu)算法如遺傳算法、粒子群算法和蟻群算法等也將被廣泛使用。
3)局部路徑規(guī)劃需要在環(huán)境完全未知且有動(dòng)態(tài)障礙物的動(dòng)態(tài)時(shí)變環(huán)境下,準(zhǔn)確可靠的預(yù)測障礙物位置信息,并采用分層策略自適應(yīng)地調(diào)整路徑算法和參數(shù)。
4)深度學(xué)習(xí)、數(shù)據(jù)挖掘、信息融合等人工智能技術(shù)將在環(huán)境感知方面發(fā)揮主導(dǎo)性的作用。多層感知器、多重組合學(xué)習(xí)可以提高環(huán)境感知信息的本質(zhì)特征表述。同時(shí),數(shù)據(jù)融合算法可以充分挖掘多元異構(gòu)數(shù)據(jù)間的有效信息,從而為無人艇構(gòu)建一個(gè)信息全面、立體、可靠的三維環(huán)境模型。
作為無人艇的關(guān)鍵技術(shù)之一,自主導(dǎo)航技術(shù)決定著無人艇自主航行能力的高低。隨著傳感器、人工智能和物聯(lián)網(wǎng)等技術(shù)的發(fā)展,導(dǎo)航定位、完好性監(jiān)測、自主環(huán)境感知和路徑規(guī)劃技術(shù)也將得到進(jìn)一步發(fā)展,無人艇將向著實(shí)用化、自主化和智能化方向邁進(jìn)。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中外會(huì)展(2014年4期)2014-11-27 07:46:46