基于MPC的大型客車轉(zhuǎn)向-制動集成控制研究*
2019-03-04 03:26:28胡劍劉鵬李剛炎
汽車技術(shù) 2019年2期
關(guān)鍵詞:模型
胡劍 劉鵬 李剛炎
(武漢理工大學(xué),武漢 430070)
主題詞:大型客車 轉(zhuǎn)向-制動 集成控制 MPC
1 前言
大型客車因具有體積大、質(zhì)量重、重心高、輪距相對較小等特點(diǎn),在行駛過程中極易發(fā)生重大交通事故[1]。一些學(xué)者針對此問題進(jìn)行了相關(guān)研究,如,文獻(xiàn)[2]提出了基于行駛穩(wěn)定性評價的主動前輪轉(zhuǎn)向(Active Front Steering,AFS)和差動制動(Differential Braking Control,DBC)協(xié)調(diào)控制策略,并根據(jù)前輪轉(zhuǎn)向角的大小來分配AFS和DBC的控制權(quán)重;文獻(xiàn)[3]和文獻(xiàn)[4]提出了基于橫擺角速度和質(zhì)心側(cè)偏角的AFS和DBC協(xié)調(diào)控制策略,并采用模糊分配法對AFS和DBC的權(quán)重進(jìn)行調(diào)節(jié);文獻(xiàn)[5]對AFS和DBC之間的耦合進(jìn)行了分析,并利用線性2自由度車輛模型和PID控制器對其進(jìn)行解耦和控制。這些研究大多是建立在單獨(dú)的主動前輪轉(zhuǎn)向系統(tǒng)和差動制動系統(tǒng)之上進(jìn)行協(xié)調(diào)或解耦控制,并未實(shí)現(xiàn)完全的集成控制,不僅不能充分發(fā)揮AFS和DBC的各自功能,還可能導(dǎo)致整車性能降低,因此合理協(xié)調(diào)這些主動安全技術(shù)成為大型客車穩(wěn)定性控制的關(guān)鍵。
基于此,本文建立了大型客車三自由度簡化模型,確定了大型客車穩(wěn)定性控制參數(shù)及其參考值,設(shè)計了大型客車轉(zhuǎn)向-制動集成控制結(jié)構(gòu),并基于模型預(yù)測控制(Model Predictive Control,MPC)的集成控制策略,通過差動制動產(chǎn)生的附加橫擺力矩以及主動前輪轉(zhuǎn)向產(chǎn)生的附加前輪轉(zhuǎn)角共同來控制大型客車的行駛穩(wěn)定性。分別在雙移線工況和正弦輸入工況下,利用MATLAB/Simulink對大型客車轉(zhuǎn)向-制動集成控制方法進(jìn)行了仿真驗(yàn)證。
2 大型客車轉(zhuǎn)向-制動集成控制結(jié)構(gòu)
大型客車穩(wěn)定性控制的關(guān)鍵之一是控制指標(biāo)的選取。由于大型客車具有重心高、易側(cè)翻的特點(diǎn),所以將橫擺角速度ωr[6]、側(cè)傾角φ和質(zhì)心側(cè)偏角β共同作為大型客車穩(wěn)定性控制指標(biāo)。
采用分層模塊化控制結(jié)構(gòu)來實(shí)現(xiàn)大型客車轉(zhuǎn)向-制動的集成控制,將其分為觀測層、集成控制層和控制分配層3個層次,如圖1所示。觀測層通過接收車輛縱向速度Vx和前輪轉(zhuǎn)角δ,利用參考模型得出參考橫擺角速度、參考側(cè)傾角和參考質(zhì)心側(cè)偏角,并與實(shí)際狀態(tài)參數(shù)值進(jìn)行比較,計算出橫擺角速度偏差Δω、側(cè)傾角偏差Δφ和質(zhì)心側(cè)偏角偏差Δβ;集成控制層利用模型預(yù)測控制算法,根據(jù)3個控制變量的偏差計算出附加前輪轉(zhuǎn)角Δδ和附加橫擺力矩ΔM。其中,附加前輪轉(zhuǎn)角直接作用于被控車輛的主動前輪轉(zhuǎn)向系統(tǒng),附加的橫擺力矩通過控制分配層轉(zhuǎn)化為四輪制動力Fij作用于被控車輛的制動系統(tǒng)。利用這種分層模塊化集成控制結(jié)構(gòu)可有效消除差動制動系統(tǒng)和主動前輪轉(zhuǎn)向系統(tǒng)之間的耦合。
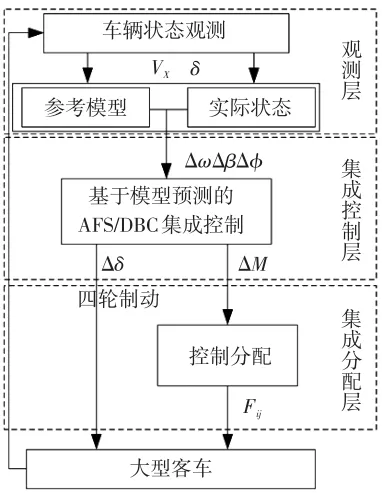
圖1 大型客車轉(zhuǎn)向-制動集成控制結(jié)構(gòu)
3 大型客車動力學(xué)模型
針對大型客車建立了含有橫擺運(yùn)動、側(cè)向運(yùn)動和側(cè)傾運(yùn)動的大型客車非線性三自由度模型,如圖2所示。
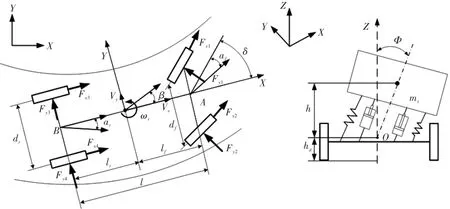
圖2 大型客車動力學(xué)模型
對大型客車進(jìn)行受力分析,可得繞Z軸旋轉(zhuǎn)、繞X軸旋轉(zhuǎn)和沿Y軸方向運(yùn)動的動力學(xué)方程:
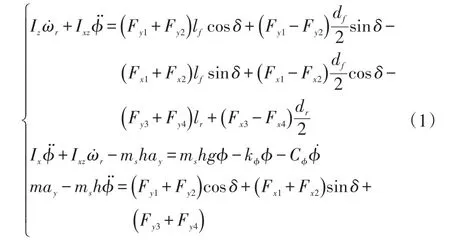
式中,ms為簧載質(zhì)量;m為整車質(zhì)量;Iz為繞Z軸旋轉(zhuǎn)的轉(zhuǎn)動慣量;Ix為繞X軸旋轉(zhuǎn)的轉(zhuǎn)動慣量;Ixz為繞XOZ平面旋轉(zhuǎn)的轉(zhuǎn)動慣量;ωr為橫擺角速度;ay為側(cè)向加速度;h為簧載質(zhì)心到側(cè)傾中心的高度;Fyi為各車輪所受側(cè)向力;Fxi為各車輪所受的縱向力;φ為簧載車身側(cè)傾角;lf為前軸距質(zhì)心距離;lr為后軸距質(zhì)心距離;df為前軸寬度;dr為后軸寬度;kφ為側(cè)傾角剛度;Cφ為懸架阻尼。
輪胎的縱向力Fx和側(cè)向力Fy利用“魔術(shù)公式”輪胎模型[7](Magic Formula Tire Model)進(jìn)行計算:
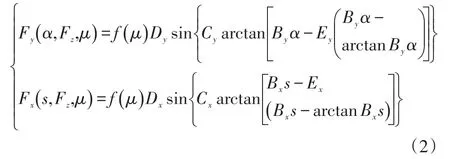
式中,a為輪胎側(cè)偏角;μ為路面附著系數(shù);Fz為輪胎垂向力;s為輪胎滑移率;Bx、Cx、Dx、By、Cy、Dy為常數(shù)。
前輪輪胎側(cè)偏角ai和后輪胎側(cè)偏角aj計算式為:
前輪輪胎垂向載荷Fzi和后輪輪胎垂向載荷Fzj計算式為:
式中,hg為側(cè)傾中心高度;l為前軸距后軸距離;Kφf為前軸側(cè)傾角剛度;Kφr為后軸側(cè)傾角剛度。
“魔術(shù)公式”輪胎模型所表示的是單一方向輪胎力計算模型,由于“摩擦橢圓”[8]的限制,輪胎所受的縱向力和側(cè)向力相互影響,可根據(jù)文獻(xiàn)[7]所推薦方法對聯(lián)合工況輪胎力進(jìn)行修正。
4 大型客車轉(zhuǎn)向-制動集成控制器設(shè)計
大型客車轉(zhuǎn)向-制動集成控制器設(shè)計主要包括參考模型的確定、MPC控制器的設(shè)計和附加橫擺力矩分配控制器的設(shè)計。
4.1 參考模型建立
以常用的線性2自由度大型客車動力學(xué)模型作為參考模型,為集成控制器提供質(zhì)心側(cè)偏角的參考值和橫擺角速度的參考值,如圖3所示。式中,β2為2自由度下的大型客車質(zhì)心側(cè)偏角;ωr2為2自由度下的大型客車橫擺角速度;kr為后輪側(cè)偏剛度;kf為前輪側(cè)偏剛度。
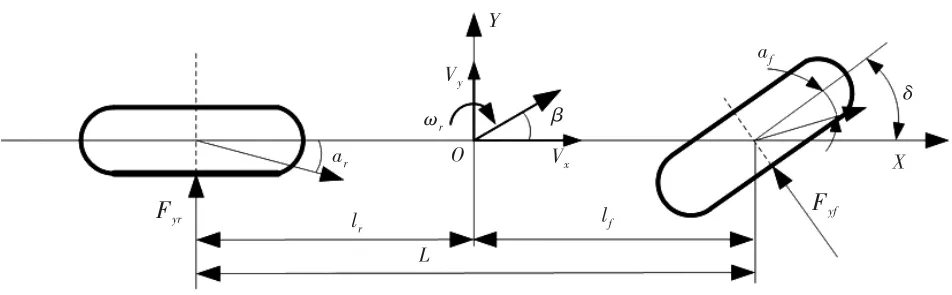
圖3 參考模型
式中,K為穩(wěn)定性因子,可由輪胎側(cè)偏剛度和車輛軸距求得。
受限于路面附著系數(shù),最大質(zhì)心側(cè)偏角βmax和最大橫擺角速度ωmax計算式為:
當(dāng)參考模型計算的參考值超過實(shí)際工況最大限制值時,應(yīng)由最大質(zhì)心側(cè)偏角βmax和最大橫擺角速度ωmax作為實(shí)際參考值,即ωref=min(ωref2,ωmax),βref=min(βref2,βmax)。為防止大型客車的側(cè)翻,將車輛側(cè)傾角的參考值φref取為0。
4.2MPC控制器設(shè)計
MPC是一種在工業(yè)中被廣泛應(yīng)用的先進(jìn)控制方法,它利用預(yù)測模型,根據(jù)被控系統(tǒng)的過程狀態(tài)信息進(jìn)行判斷,從而實(shí)現(xiàn)滾動優(yōu)化和反饋矯正,具有魯棒性強(qiáng)、在線實(shí)時性好等優(yōu)點(diǎn)[9]。
為方便建立大型客車轉(zhuǎn)向-制動集成控制中MPC控制器的預(yù)測模型,采用局部線性化的思想將復(fù)雜的非線性輪胎模型線性化,即:
式中,F(xiàn)yf為前輪輪胎側(cè)向力,F(xiàn)yr為后輪輪胎側(cè)向力,af為前輪輪胎側(cè)偏角,ar為后輪輪胎側(cè)偏角。
根據(jù)式(1)和式(8),加入附加前輪轉(zhuǎn)角和附加橫擺力矩的大型客車動力學(xué)模型狀態(tài)空間表達(dá)式為:

將其寫成預(yù)測模型的形式:

式中,O=為控制變量的系數(shù)矩陣;u(k)=為控制變量;d(δ)=Nδ為固定項;B=為狀態(tài)變量到輸出變量的系數(shù)矩陣;Y(k)為輸出變量。
將上述預(yù)測模型離散化,并變換成增量的表達(dá)形式。根據(jù)變換后的預(yù)測模型,可得控制輸出量的預(yù)測序列,用矩陣形式表達(dá)為:

式中,Yp為輸出量的預(yù)測序列,ΔU為控制量增量,F(xiàn)為輸出量的預(yù)測序列的系數(shù)矩陣,K為控制量增量的系數(shù)矩陣。
為保證控制效果,MPC控制器性能指標(biāo)設(shè)計為:

式中,Q為目標(biāo)跟蹤誤差的權(quán)重;R為控制量變化大小的權(quán)重。
另外,在控制過程中系統(tǒng)控制量和狀態(tài)量需要滿足下述約束:
4.3 附加橫擺力矩分配控制器設(shè)計
通過模型預(yù)測算法得到附加橫擺力矩后,需要對大型客車的各車輪施加不同的制動力。目前比較成熟的附加橫擺力矩分配算法有廣義逆法、直接分配法、鏈?zhǔn)竭f增法及數(shù)學(xué)規(guī)劃法等。本文選取單輪制動直接分配法,其具有結(jié)構(gòu)與算法簡單、實(shí)時性強(qiáng)、易于實(shí)現(xiàn)且成本較低等優(yōu)點(diǎn)。
對車輪進(jìn)行受力分析,得到單輪制動所產(chǎn)生的橫擺力矩為:

大型客車的轉(zhuǎn)彎特性可分為中性轉(zhuǎn)向、轉(zhuǎn)向過度和轉(zhuǎn)向不足[10]。當(dāng)橫擺角速度的實(shí)際值大于參考值時屬于轉(zhuǎn)向過度,此時對大型客車外前輪進(jìn)行制動以產(chǎn)生與大型客車轉(zhuǎn)向相反的附加橫擺力矩,抑制其過度轉(zhuǎn)向;當(dāng)橫擺角速度的實(shí)際值小于參考值時屬于轉(zhuǎn)向不足,此時對大型客車內(nèi)后輪進(jìn)行制動以產(chǎn)生與大型客車轉(zhuǎn)向相同的附加橫擺力矩,抑制其轉(zhuǎn)向不足。附加的橫擺力矩分配策略如表1所示。

表1 附加橫擺力矩分配策略
5 仿真驗(yàn)證
為驗(yàn)證所設(shè)計的模型和集成控制器的可行性和有效性,采用MATLAB/Simulink搭建大型客車動力學(xué)模型和集成控制器模型,分別在雙移線工況和正弦輸入工況下進(jìn)行了仿真研究,仿真驗(yàn)證模型如圖4所示。
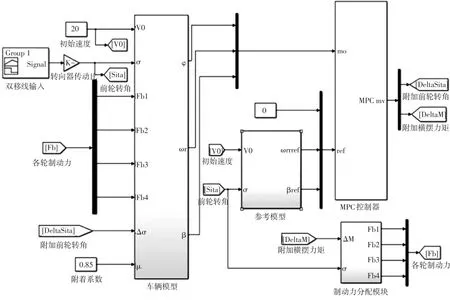
圖4 大型客車轉(zhuǎn)向-制動集成控制Simulink仿真模型
經(jīng)過反復(fù)調(diào)試,所設(shè)計的MPC集成控制器參數(shù)如下:
a. 采樣周期為0.01 s,控制時域?yàn)?,預(yù)測時域?yàn)?5。
b. 權(quán)重矩陣Q:Q11=100,Q22=500,Q33=120,當(dāng)i≠j時,Qij=0;
c. 權(quán)重矩陣R:R11=2,R22=0.01,當(dāng)i≠j時,Rij=0。
d.約束條件如下:
附加橫擺力矩邊界約束:-500~500 N?m;
附加橫擺力矩增量約束:-40~40 N?m;
附加前輪轉(zhuǎn)角邊界約束:-0.1~0.1 rad;
附加前輪轉(zhuǎn)角增量約束:-0.03~0.03 rad;
側(cè)傾角約束:-0.12~0.12 rad;
質(zhì)心側(cè)偏角約束:-0.09~0.09 rad;
橫擺角速度約束:-0.35~0.35 rad/s。
5.1 雙移線工況仿真
雙移線轉(zhuǎn)向輸入是模擬駕駛員急速超車的工況,是車輛操縱穩(wěn)定性和行駛穩(wěn)定性測試的常用工況之一。根據(jù)標(biāo)準(zhǔn)ISO 3888-1-1999《乘用車-急劇換道用車道第1部分:兩車道變換》有關(guān)規(guī)定,設(shè)置雙移線工況下的轉(zhuǎn)向盤轉(zhuǎn)角如圖5所示,設(shè)置大型客車的初始速度Vx=72 km/h,路面附著系數(shù)μ=0.85,仿真結(jié)果如圖6所示。
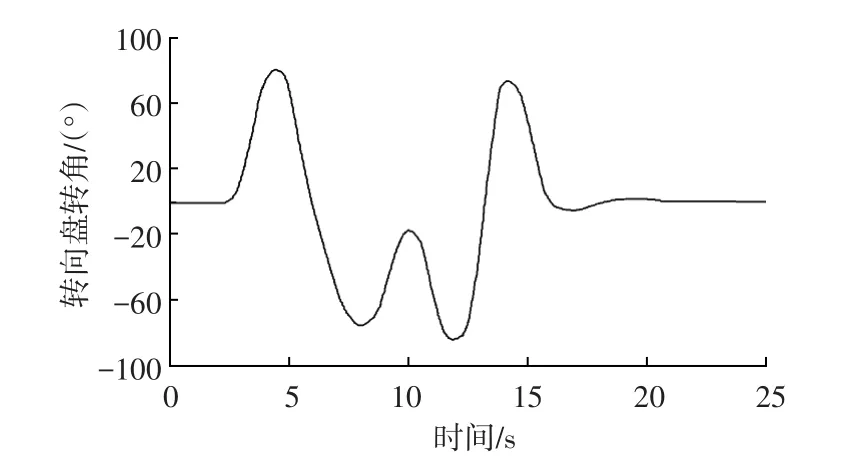
圖5 雙移線工況下的轉(zhuǎn)向盤轉(zhuǎn)角
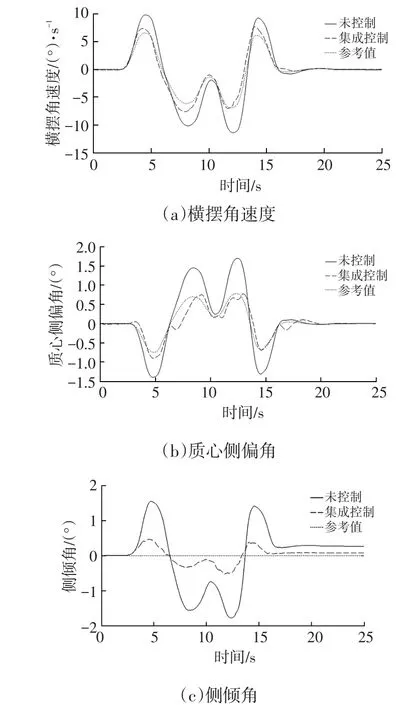
圖6 雙移線工況下集成控制仿真結(jié)果
5.2 正弦輸入工況仿真
正弦輸入工況下的轉(zhuǎn)向盤轉(zhuǎn)角如圖7所示。設(shè)置大型客車的初始速度Vx=72 km/h,路面附著系數(shù)μ=0.85,仿真結(jié)果如圖8所示。
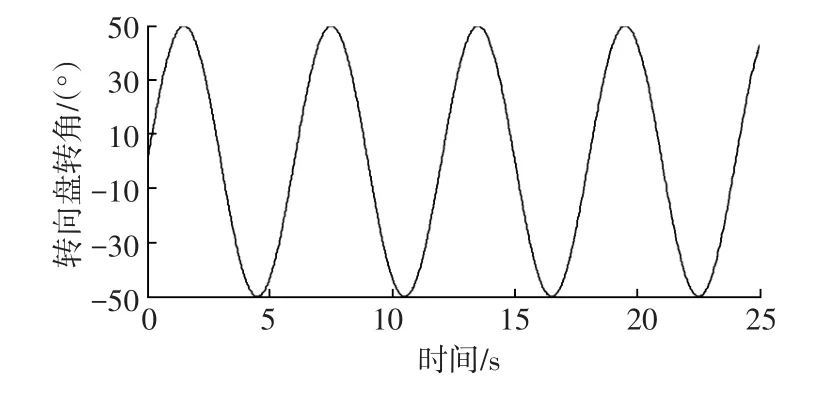
圖7 正弦輸入工況下的轉(zhuǎn)向盤轉(zhuǎn)角
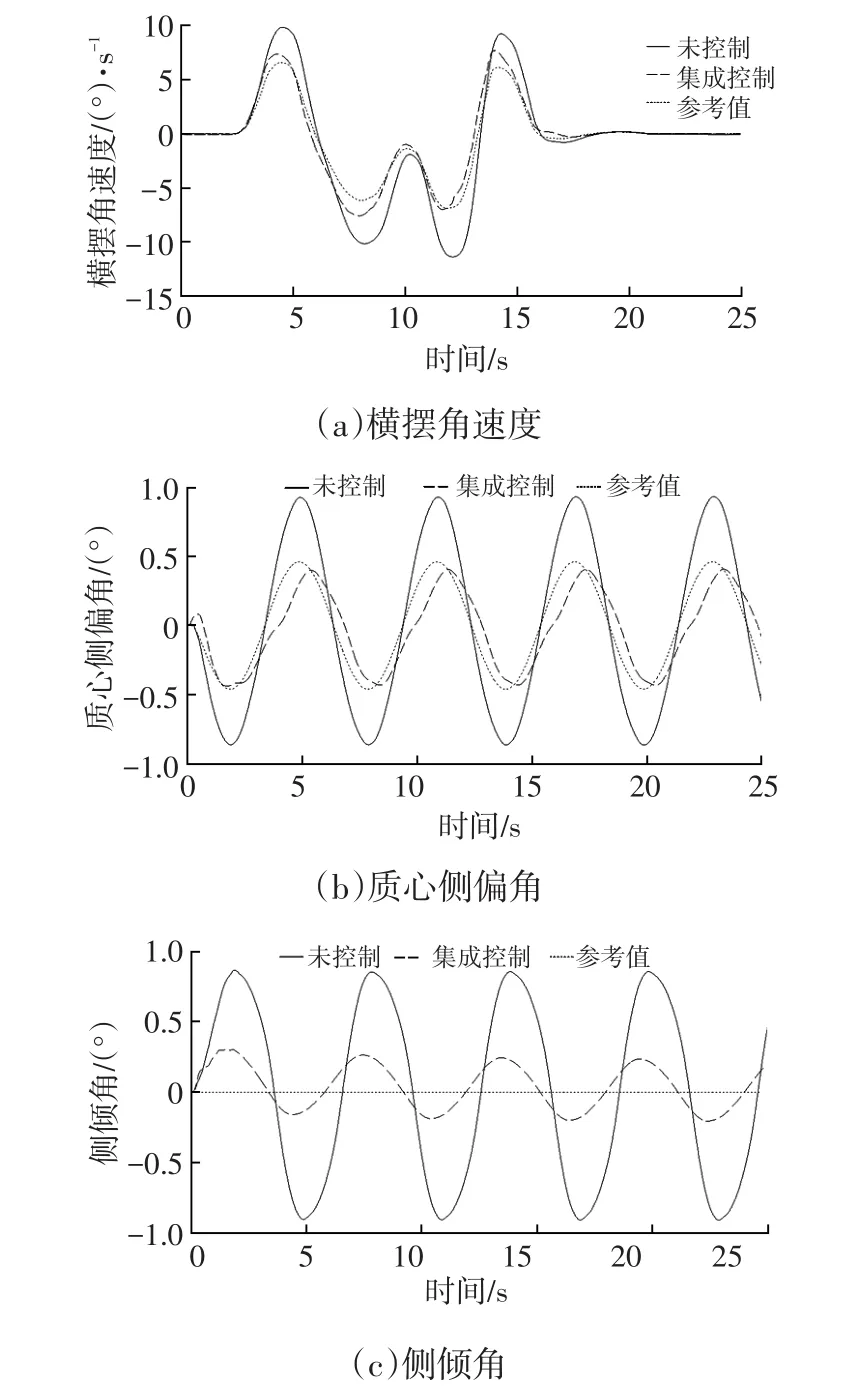
圖8 正弦輸入工況下集成控制仿真結(jié)果
通過對所設(shè)計的大型客車轉(zhuǎn)向-制動集成控制仿真分析可知,與沒有集成控制的大型客車相比,本文所設(shè)計的模型預(yù)測控制器能有效跟蹤控制指標(biāo)的參考值,保證了車輛的行駛穩(wěn)定性。
6 結(jié)束語
本文提出了一種基于模型預(yù)測控制(MPC)的大型客車轉(zhuǎn)向-制動集成控制算法,并分別在雙移線工況和正弦輸入工況下進(jìn)行了仿真驗(yàn)證,結(jié)果表明,與沒有集成控制的大型客車相比,基于模型預(yù)測策略所設(shè)計的大型客車轉(zhuǎn)向-制動集成控制器能同時控制車輛橫擺角速度、側(cè)傾角和質(zhì)心側(cè)偏角,可有效跟蹤控制指標(biāo)的參考值,保證了大型客車的行駛穩(wěn)定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
