光伏電池最大功率點跟蹤的仿真研究
2019-03-05 01:37:44儲海兵
現代計算機 2019年3期
儲海兵
(江蘇昆山供電公司,昆山314100)
0 引言
隨著太陽能等常規能源的日漸枯竭,綠色環保的清潔能源日益受到人們的關注。諸如太陽能之類的可再生能源在各國得到著重發展,并被廣泛的應用于發電系統中去。
太陽能發電有兩大類型:一類是太陽光發電(亦稱太陽能光發電),另一類是太陽熱發電(亦稱太陽能熱發電)。光伏發電是太陽能光發電的一種,它是利用半導體界面的光生伏特效應將光能直接轉變為電能的一種技術,是一種將太陽能直接轉變為電能的發電方式。與傳統的發電方式相比,光伏發電具有節能環保、不受資源分布制約、安全可靠等很多優點,但是由于太陽光照具有不穩定性,受氣候、環境影響較大,因此,光伏發電也存在著很多需要解決的難題,例如如何使光伏電池始終工作在最大功率點。
光伏電池是光伏發電的一個重要組成部分,隨著太陽光照強度和溫度的不斷變化,光伏電池輸出的電壓和電流呈現出很強的非線性,在光照強度和溫度一定時,光伏電池具有唯一的一個最大功率點。因此,如何在外界環境不斷變化的條件下,使光伏電池的輸出功率始終保持在最大功率點處成為光伏發電系統中的一個亟待解決的問題。目前,為了實現最大功率點跟蹤采用了很多控制方法,如擾動觀測法、增量電導法、恒壓追蹤法等[1-2]。
在眾多方法中,擾動觀察法具有實現簡單,跟蹤高效等特點,但是傳統的擾動觀察法步長固定,而步長的設置對其跟蹤速度與跟蹤精度有很大的影響。當步長設置較小時,達到最大功率點所需要的擾動次數較多,時間較長,達到最大功率點附近時震蕩的幅度較小;當步長設置較大時,達到最大功率點所耗費的時間較短,但達到最大功率點附近時的震蕩幅度較大。因此,如何選擇合適的步長,以獲得最快的跟蹤速度與較高的跟蹤精度成了一個重要問題。為了解決這一問題產生了很多改進的方法,例如變步長變占空比擾動觀察法、基于遺傳算法和擾動觀察法的MPPT 算法[3]等。在本文中,采用MATLAB/Simulink 分別對擾動觀察法、變步長變占空比擾動觀察法進行了建模仿真,并對實際仿真運行的運行結果進行了比較觀察。結果表明,變步長變占空比擾動觀察法較傳統的固定步長擾動觀察法在跟蹤速度和跟蹤精度方面都有了明顯的改善提高。
1 光伏電池工作特性
光伏電池的輸出功率隨著太陽光照強度、溫度和負載的變化而成非線性變換,外部條件固定時,在特定工作電壓下,功率達到最大值時,這個功率最大值點即為最大功率點(Maximum Power Point,MPP)。光伏電池P-U 特性曲線如圖1 所示。

圖1 光伏電池P-U特性曲線
在使用太陽能光伏發電的過程中,為了提高系統的工作效率,獲得最優的性能,需要對功率進行不斷尋優,以使光伏電池始終工作在最大功率點附近,這個尋優過程被稱之為最大功率點跟蹤(Maximum Power Point Tracking,MPPT)[4],目前,最大功率點跟蹤技術已成為光伏發電系統中的研究熱點。
2 工作原理及系統建模與仿真
傳統的固定步長擾動觀察法及改進的擾動觀察法仿真模型包括:光伏電池(PV)模塊[5],DC/DC 變換電路,擾動觀察法(P&O)控制器模塊,脈沖寬度調制(PWM)模塊。
仿真參數設定如下:環境溫度為25°C,太陽光照強度為從1000W/m2變化到800W/m2再變化到600W/m2。電容C1=0.001F,電容C2=0.002F,電感L=0.003H;PWM脈沖信號周期為0.001s,零階保持器的采樣周期為0.0001s,負載R=18Ω。
系統的工作流程為:首先,設定太陽光照強度和環境溫度。為了更好地觀察擾動觀察法的跟蹤效果,本文中將環境溫度設為25°C,太陽光照強度設為從1000W/m2變化到800W/m2再變化到600W/m2。光伏電池模塊輸出電壓U 和電流I,電壓、電流經檢測電路轉化為擾動觀察法控制器所需要的信號形式輸入到擾動觀察法控制器模塊,經過擾動控制后再將輸出的信號輸入到脈沖寬度調制模塊中去。通過脈沖寬度調制模塊,改變輸出波形的占空比。再將改變占空比之后的波形輸入至DC/DC 變換電路,通過使用DC/DC 電路,將電壓不穩定的直流電流變成我們所需要的電壓穩定的直流電流。將電壓值與電流值相乘,所得結果輸入到示波器,通過示波器觀察尋優的過程。通過擾動觀察法控制器的不斷擾動,調整電壓或者占空比,最終找到最大功率點,完成最大功率點尋優的過程。
2.1 擾動觀察法原理及仿真模型
擾動觀察法的原理是對光伏電池輸出的電壓進行不斷擾動調整,通過比較擾動前后功率值的大小,不斷調整擾動方向,最終找到最大功率點。在最大功率點尋優過程中,若功率值較前一時刻增大,說明電壓調整的方向正確,則繼續按照原方向對電壓進行擾動;若功率值較前一時刻減小,說明電壓調整的方向錯誤,則改為采用與原方向相反的擾動。
擾動觀察法的算法流程圖如圖2 所示。

圖2 擾動觀察法的算法流程圖
基于擾動觀察法控制算法的光伏發電系統MPPT仿真模型如圖3 所示。

圖3 基于擾動觀察法控制算法的光伏發電系統MPPT 仿真模型
2.2 變步長變占空比擾動觀察法原理及仿真模型
變步長變占空比擾動觀察法的原理是每隔一定的時間對光伏電池的占空比進行變步長的擾動,使占空比增加或減少,與此同時,同時對輸出功率進行觀測,通過比較功率值的變化方向決定下一步的擾動方向,最終實現最大功率點尋優的目的。
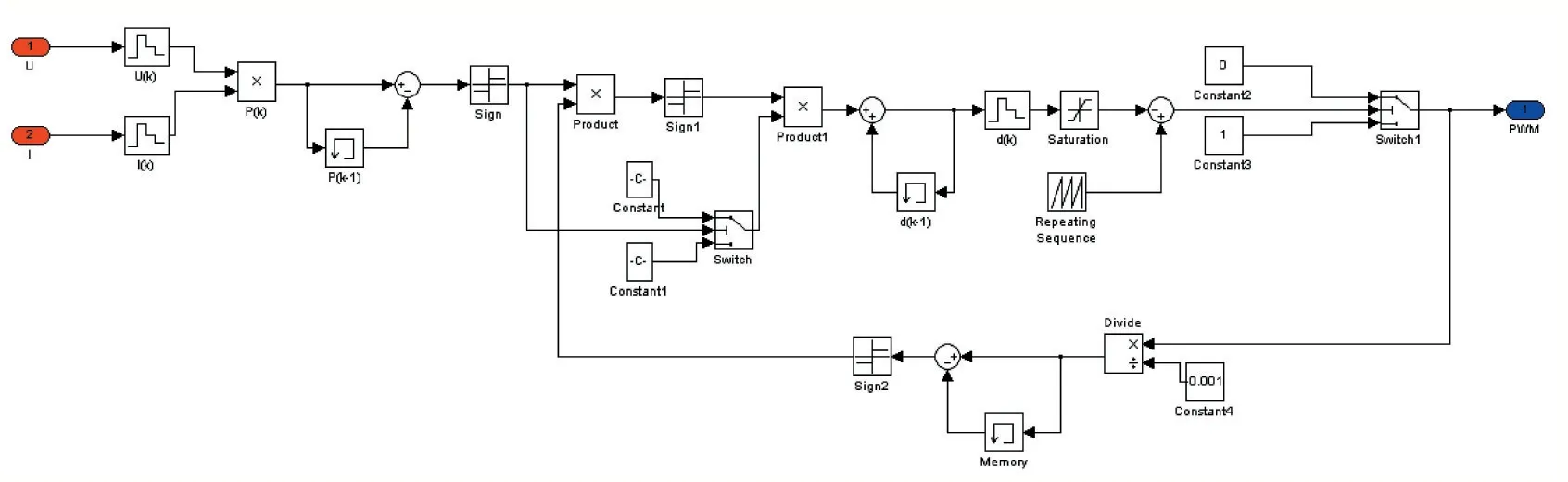
圖4 基于變步長變占空比擾動觀察法控制算法的光伏發電系統MPPT仿真模型
變步長變占空比擾動觀察法的仿真模型在基于擾動觀察控制算法的光伏發電系統MPPT 仿真模型的基礎上對P&O 模塊與PWM 模塊進行了改進,將固定步長固定占空比的擾動形式變為變步長變占空比的擾動形式[6-8]。
本文所采用的變步長變占空比擾動觀察法的思路為將電壓、電流相乘,獲得功率P。通過P 的變化方向,來對占空比進行變步長擾動。若功率值較前一時刻增大,說明占空比調整的方向正確,則采用大步長來改動占空比,將步長值設置為0.01,占空比擾動方向不變;若功率值較前一時刻減小,說明占空比調整的方向錯誤,則改為采用小步長來改動占空比,將步長值設置為0.001,占空比擾動方向設置為與原擾動方向相反。其仿真模型如圖4 所示。
2.4 仿真結果
傳統的固定步長擾動觀察法仿真結果如圖5所示。

圖5 基于擾動觀察法控制算法的光伏發電系統MPPT仿真結果
如圖5 所示,日照強度從1000W/m2變化到800W/m2再變化到600W/m2時,仿真分別于0.25 秒、2.12 秒、4.14 秒左右達到穩定,達到穩定時,該光照強度下的輸出功率最大值分別為190W、151W、107W 左右。達到穩定后,曲線在一定的范圍內來回震蕩。
如圖6 所示,日照強度從1000W/m2變化到800W/m2再變化到600W/m2時,仿真分別于0.02 秒、2.03 秒、4.06 秒左右達到穩定。系統穩定后保持在一個恒定的值上,無震蕩,不會有多余的能量損失。
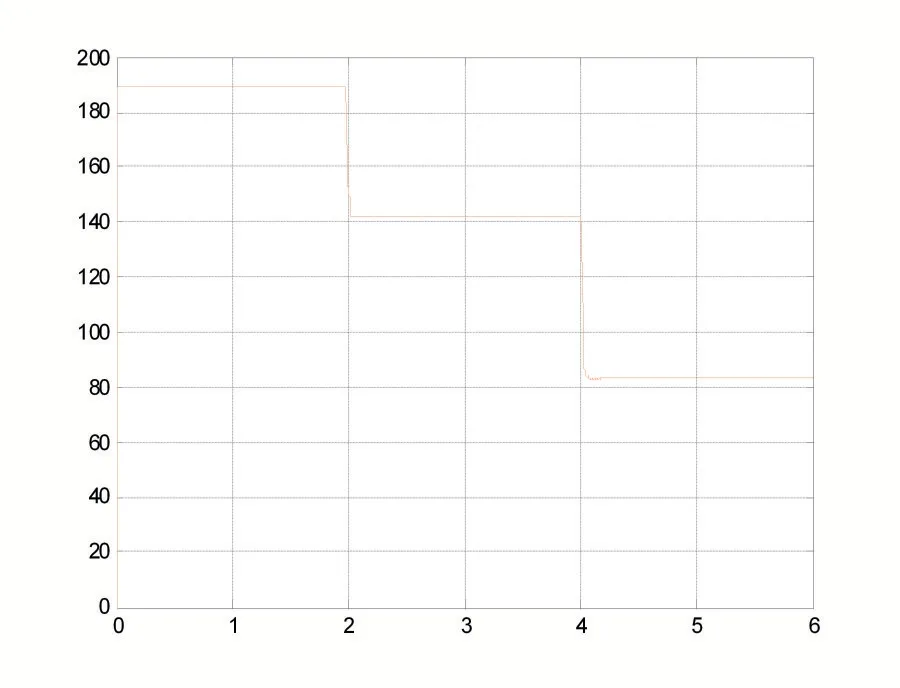
圖6 基于變步長變占空比擾動觀察法控制算法的光伏發電系統MPPT仿真模型
3 結語
本文對擾動觀察法及變步長變占空比擾動觀察法的跟蹤原理進行了分析,并據此對兩種方法建立MATLAB/Simulink 仿真模型進行仿真實驗。通過仿真實驗,獲得了最大功率跟蹤的尋優曲線,將獲得的尋優曲線進行了對比,進一步說明變步長變占空比擾動觀察法較之傳統的固定步長擾動觀察法更加具有優越性。
在環境溫度為25°C,太陽光照強度從1000W/m2變化到800W/m2再變化到600W/m2時,采用固定步長擾動觀察法在經過一段時間的尋優后能夠達到最優值,并在最優值附近不斷震蕩,雖然震蕩步長設置合理時,震蕩的幅度不會很大,但也會產生一定的不必要的能量損失;采用變步長變占空比擾動觀察法時,能夠在很短時間內達到最優值,并且在達到最優值時穩定在一個固定的數值,不發生震蕩,因此不會產生能量損失。仿真結果表明:采用變步長變占空比擾動觀察法時系統的動態性能良好,能夠很好地適應不斷變化的外界環境,在太陽光照強度變化較大時,能夠快速尋找到最大功率點,使系統工作在最大功率點處,具有很好的實用價值。