
一種新型水域漂浮物收集監測系統
2019-03-12 08:13:24祝典廖敏劉新順劉曉東劉磊
現代電子技術 2019年5期
祝典 廖敏 劉新順 劉曉東 劉磊
關鍵詞: 漂浮垃圾; 收集器; 水面清潔監控; 海洋碎片; 打撈; 塑料垃圾
中圖分類號: TN98?34 ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2019)05?0027?05
A new collection and monitoring system of flotage in water area
ZHU Dian, LIAO Min, LIU Xinshun, LIU Xiaodong, LIU Lei
(Beijing Institute of Computer Technology and Application, Beijing 100854, China)
Abstract: In order to improve the situations of ecological environment damage and water pollution caused by floating litter in water area, various forms of cleaning and salvage were carried out at home and abroad. A new water surface cleaning and monitoring system was developed for the low automation degree of salvage mode and delayed state monitoring. The system can collect the floating litter such as plastic garbage by means of collecting device, and transmit the collected data. The collection network database system is set up to provide the effective collected flow monitoring data for visual display in the form of map, and provide the monitoring and management services of floating litter. The system can reduce the physical labor of cleaning workers, and promote the control and management of garbage in water area, and solve the problem from the source of marine debris.
Keywords: floating litter; collector; water surface cleaning monitoring; ocean debris; salvage; plastic garbage
0 ?引 ?言
綠色和平組織在2016年8月發表報告指出全世界每秒鐘有200 kg塑料被倒入海洋,累計每年有超過800萬噸塑料留在海洋中。2017年雖然我國海水質量總體有所改善,但陸源入海污染壓力較大,在旅游休閑娛樂區等鄰近海域海洋垃圾密度較高[1?3]。海洋河流湖泊等水域內的漂浮垃圾正在逐漸威脅到自然生態環境以及人類和自然的和諧發展。
我國對城市水面漂浮垃圾的污染控制相當重視,2015年《水污染防治行動計劃》中明確規定,要求河面無大面積漂浮物,河岸無垃圾,無違法排污口。目前漂浮物打撈收集方式為人工打撈,工具為小船和自制工具。打撈方式落后,人力資源有限,在2017年有16個斷面水質嚴重惡化且不達標,導致政府重點任務進度滯后。
針對現有的打撈和收集方式自動化程度低的問題,國內外均開展了自動收集裝置的研究,包含清潔機器人、船用收集裝置[4?6]、洋流驅動設備。清潔機器人造價較高,船用清潔裝置適用于船體,洋流驅動設備適用于海洋等大面積水體,在河流湖泊不利于大規模廣泛推廣。一般單臺設備獨立運行控制,無法進行系統性協調統一規劃運行。廢棄漂浮物如果不及時清理,在河流水域隨水流運動,污染下游流域。針對漂浮物監測問題,國內外也對該項監測進行了研究。目前一般的監測為高清視頻監測的方式,通過軟件過濾、去除水波抖動、智能算法等提高精確度[7?8],算法依賴性強。設定漂浮物聚集地,從源頭監測治理的方案一直得到廣泛認可[9?10] ,但是實施打撈方式的自動化程度不高,監測不夠全面,不利于漂浮物的管控。因此,開發和應用水面漂浮物收集監測系統,以自動化方式就地收集垃圾,減輕人工打撈的勞動量,進而實現實時流量狀態監控,促進水域垃圾的控制和統一管理。
1 ?系統設計
1.1 ?總體設計方案
水面漂浮物收集監測系統由自動收集裝置前端網絡和監測管理服務系統組成,如圖1所示。區別于視頻監測面積漂移計算的方法,消除了對視頻監測軟件的依賴性,該系統通過對水面漂浮物的收集,直接監測漂浮物收集的體積和數量,對垃圾流量監控更加準確。
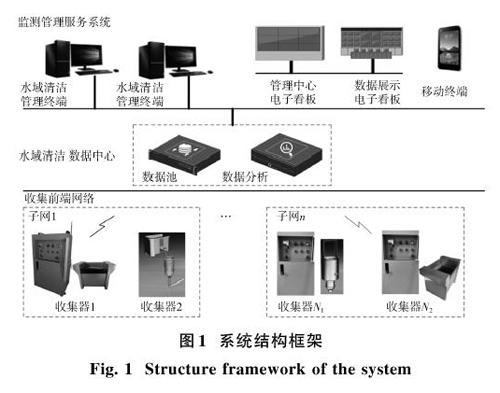
收集前端網絡由處于各節點的不同種類收集器組成。收集器的自動收集前端裝置放置于水中,完成水域漂浮垃圾收集,收集狀態的監測;控制系統箱體放置在陸地,完成就地控制和無線傳感的功能,將收集數據和狀態傳輸至服務器,接收管理終端的控制,組網運行。
監測管理服務系統由數據采集和分析服務器、水域清潔管理系統終端和移動終端組成。監測管理系統對水域的漂浮垃圾收集數據進行記錄、分析和處理,將數據傳輸給管理應用層,對自動收集裝置組成的多機系統進行收集監測和運行控制。也可以通過移動終端實現裝置的遠程控制功能。
1.2 ?主要功能技術指標
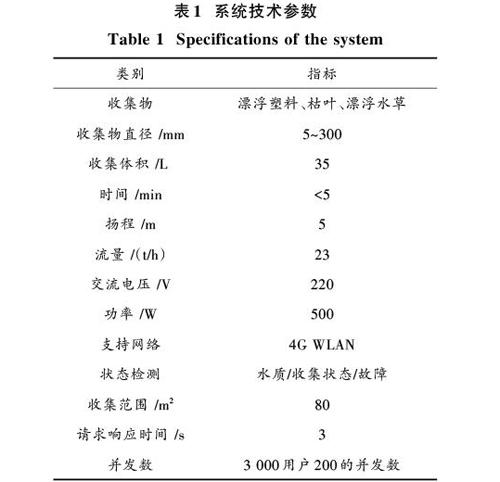
收集器系統采用電驅動方式,通過抽吸過濾的方式實現漂浮物收集,方便就地控制,前端內置傳感器檢測收集器的收集狀態,通過無線傳輸對水面漂浮物進行監控、流量統計和狀態評估。系統的主要技術參數如表1所示。
2 ?收集前端網絡
收集器的設計依據水利和水勢布局,滿足不同水勢變化的要求。漂浮物隨著水利地勢情況會形成一些天然聚集地,將收集器在漂浮物聚集地合理布置安裝形成收集網絡。
2.1 ?收集裝置設計
河流湖泊水位隨著朝夕、季節、天氣不同而變化,高度變化可超過1 m,如果采用固定高度收集方式,則水域的水位變化時,收集器沉入或高于水面,不能實現正常收集功能。因此收集前端裝置設計能夠自適應水位,在垂直方向隨水位浮動,在運行過程中豎直方向可根據水位自動調節。
設計收集裝置自重不大于30 kg,單人能夠搬動,左右端面方便抓握,滿足人體工程學要求。收集裝置前面板入口低于水面不小于40 mm,水面的大部分垃圾能被水流帶入垃圾桶。
實現裝置穩定漂浮運行,需滿足幾個條件:浮心在上,重心在下,穩心在重心之上,回復力矩為正值;水泵排水量小于入水口最大流量,防止抽水造成裝置浮起;運行過程中豎直方向排水浮力和重力合成產生上浮力,上浮力零點位于水面下15 mm處,上浮時速度零點位于水面下20 mm。
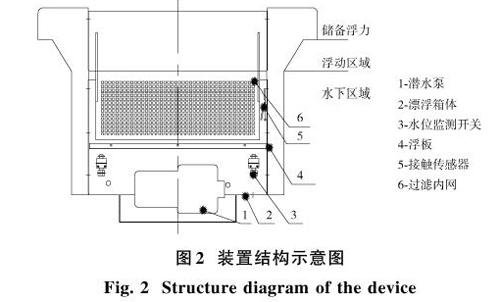
根據以上原則,設計裝置為左右對稱的長方體結構,左右兩側為浮板提供浮力漂浮于水中,前面板低于水位為漂浮物的入口,如圖2所示。裝置滿足近岸的淺水收集要求,高度為480 mm,容積為40 L。箱體由潛水泵1、漂浮箱體2、過濾內網6組成,底部安裝配重鐵塊降低重心增加穩定性,內壁安裝傳感監測設備5。漂浮箱體側板采用實心浮體結構,分為水下區域、浮動區域和儲存浮力三部分。儲備浮力部分處于水面上方,作為擾動時維持穩定漂浮的浮體。設計浮板水下區域厚50 mm,高度為280 mm,該部分體積提供浮力為133 N,水泵、配重、結構體為80 N,浮動區間浮力為76 N 。干舷部分儲備浮力為112 N,提供搖擺傾斜時的穩定性。
靜態水泵不啟動時水位線位于箱體儲備浮力和浮動區域交界。入水口位于水面下,接通電源啟動水泵工作,將箱體內水排出,水流和漂浮的垃圾通過入水口進入收集器,水流經內網過濾后通過水泵排出,垃圾留在過濾內網里完成垃圾的收集。
啟動工作后,水泵向箱外抽水,水箱內水量減少,向上漂浮,入水口處水流入。入口具有可隨水流傾斜的擋板,穩定工作狀態下,入水口擋板受到水流沖擊力,固定點在拉力、浮力以及重力的作用下滿足平衡條件。箱體內外水位差約10 mm。運行時箱體空腔體積等于浮起部分側壁的體積,入水口和出水口流量平衡。
潛水泵采用臥式泵,流量為30 t/h,55 mm口徑管道直排,滿足箱體內外水位差要求。同時水位壓差造成的揚程損失很小,在出水口實測流速可達3 m/s,可為箱體向前漂移提供動力。
接觸壓力傳感器5在箱體的前后左右側壁安裝,通常每個側面一個,用于監測內網廢棄物的收集量,內網收集滿廢棄物,對傳感器5產生持續穩定的壓力時,通過控制過濾擾動信號判斷收集滿桶狀態。傳感器采用面接觸式壓力傳感,較大的接觸面可提高準確性。
水位傳感器3用于檢測收集箱體內的水位,在箱體內的水位較低時發出開關信號,啟動故障水位狀態保護,用于防止水泵干抽。
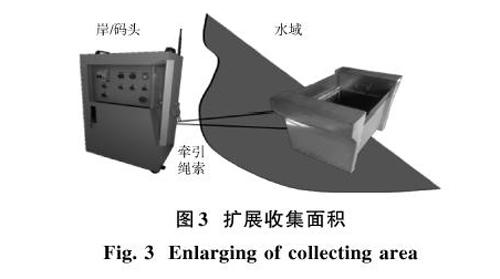
為了提高收集效率,可借助繩索牽引收集裝置,借助水泵向前的推動力使裝置在一定范圍內運行,擴大收集半徑和面積,如圖3所示。
2.2 ?收集器控制系統設計
控制系統裝在控制箱內放置在岸邊,為自動收集前端提供動力電源;控制箱內置牽引收集裝置,提供動力將裝置收回靠岸;完成水泵調速和保護控制功能;采集前端裝置狀態信息,進行收集狀態信息判斷,將數據傳輸給上游數據庫,提供水質監測接口。
2.2.1 ?收集器控制系統硬件
控制箱在面板提供指示和控制操作,方便人員就地控制。具有報警、運行、急停等指示,具有啟動、停止、牽引、復位、急停及防干抽控制;提供過流保護,監測收集器收集狀態(滿桶/空桶)、監測設備狀態(運行/故障)、水泵功率。通過無線傳輸實現該信息與監測系統同步。
控制系統硬件主要由牽引電機、水泵調速器、主控制板、傳感器模塊、傳輸模塊組成。控制計算功能由控制主板實現,主板由處理器模塊、傳輸模塊、I/O模塊、A/D模塊、D/A模塊、電源模塊組成。控制主板接口如圖4所示。
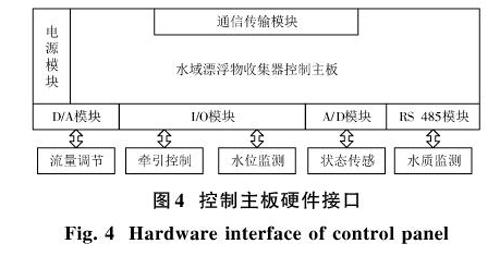
控制系統采用220 V AC供電,市電經開關電源給控制主板供電,滿足電磁兼容要求。控制板以一定的周期采集傳感器信息并依此判斷垃圾桶內垃圾的收集狀態。接口接入前端接觸壓力傳感器,收到傳輸信號后,進行濾波處理,綜合判斷垃圾桶是否裝滿,防止錯誤傳輸垃圾桶垃圾收集狀態。當垃圾桶裝滿時控制牽引繩索收縮從而將裝置回收靠岸,方便垃圾清潔工清理收集框內的垃圾。通信傳輸模塊將垃圾桶狀態信息上傳。
2.2.2 ?收集器控制系統軟件
控制系統軟件在硬件平臺上完成前端自動收集裝置監測控制以及數據信息上傳的功能。
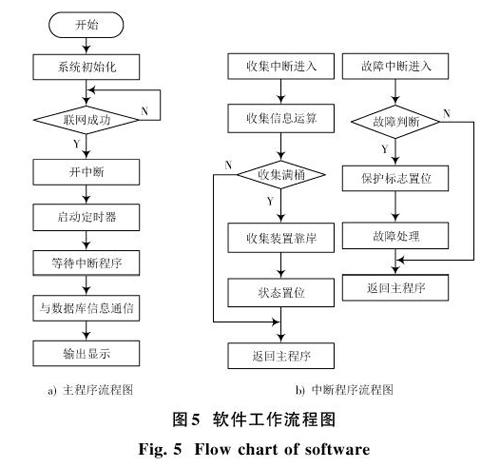
由多個收集器形成的網絡在某個區域布置,形成統一的監測系統,收集裝置開機首先加入網絡,進入工作狀態。為了降低系統功耗,軟件采取“發送?休眠?發送”的工作方式,終端控制器以一定的周期采集現場狀態信息,以中斷的方式將采集的數據進行處理,提取監測對象狀態的特征信息,判斷垃圾桶是否裝滿以及工作是否正常。當收集裝置裝滿時,及時發出繩索牽引的命令,將前端收集裝置靠岸,同時水泵停止工作,起到節能作用。工作流程圖如圖5所示。
控制系統監測傳輸的數據內容包括地理位置、設備編號、設備型號、工作狀態、垃圾收集狀態、當前動力功率、當前報警信息、牽引電機功率、牽引電機狀態。當判斷任一狀態發生變化時,將數據傳輸發送,連續發送多次應答數據幀,確保數據傳輸成功。數據通過有線、無線或4G方式傳送至數據采集服務器,完成狀態感知和信息傳輸的功能。
3 ?監測服務系統
監測服務系統服務于清潔人員、水域管理人員以及公眾群體。在控制中心的電子看板上向管理者展示設備信息,當前和歷史的水面清潔態勢,對布置在水域的設備進行控制和管理;基于前端收集網絡的實時數據,在管理Web端向清潔人員就近發布作業指令,進行設備巡查和清理,提高清潔效率,輔助整體水域管理和治理措施決策。
3.1 ?服務系統構架
系統采用B/S模式設計開發。通過用戶名密碼方式實現用戶的身份認證,為不同身份用戶提供不同的信息及應用系統的訪問控制。
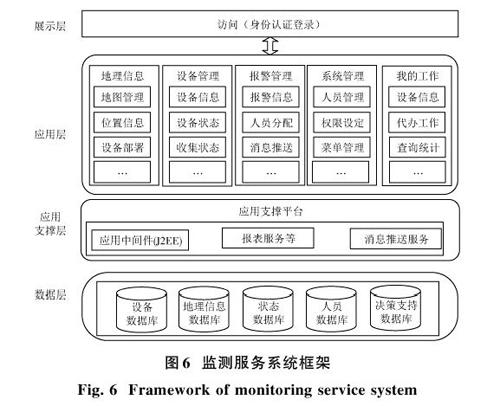
前端收集網絡傳感信息數據存儲在數據層,設置設備數據庫、地理信息數據庫、狀態數據庫、人員數據庫以及決策支持數據庫。通過數據處理運算,在應用層為用戶提供地理信息顯示、設備管理控制、系統管理服務以及人員工作等服務。
服務平臺實現3 000用戶200的并發數,數據互操作依托于互聯網,通過硬件系統確保網絡通信的順暢。采取通用的網絡傳輸協議,應用開源系統平臺,實現系統智能性、實時性,促進平臺上數據的互操作順利進行。采用多層次信息安全系統,根據信息種類制定不同的信息安全計劃,對某些信息進行特殊安全保護,保證信息系統安全。
監測服務系統框架如圖6所示。
3.2 ?Web端和移動端系統設計
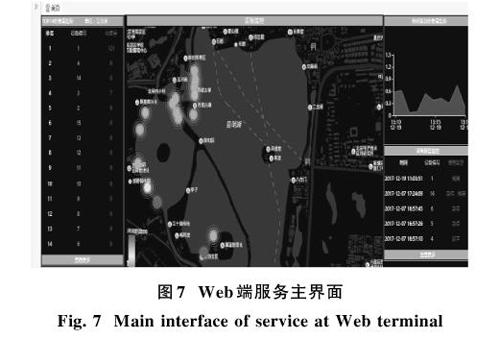
Web監測服務系統以實時地圖的方式進行界面展示,實現簡單易用的快捷操作,如圖7所示。地圖上以點位的方式顯示布置狀況,可進行放大縮小和點位控制操作。各點位不同的顏色表示收集狀態和故障情況。點擊收集器的點位進入設備管理界面,顯示該設備的地理位置信息、收集的狀態以及設備的責任人員;在該界面可對設備進行遠程控制操作,選擇責任人分配任務,就近對裝置進行巡查和清理。
通過前端設備傳輸的收集數據,得到分區域分時段的漂浮物監測情況。對單臺設備的清理次數進行統計,在界面對收集器清理情況排序顯示,得到不同區域漂浮物流量的監測數據;對各時段的收集總量進行統計,得到該區域不同時段的漂浮物流量監測數據。可采用不同的顏色對不同流量的區域進行分塊顯示,方便管理者對某個水域的漂浮物流量總體狀況評估以及監管控制。
移動端界面如圖8所示。移動設備可采用專用手持設備和手機移動端,專用設備可實現高安全等級防護。與Web端界面同步,手機移動端采用地圖顯示,可使用微信接口接入,不需要下載安裝即可使用,用戶掃一掃或搜一下就可打開應用,巡視人員可隨時隨地查看設備狀態,遠程對設備進行操作和管理。
4 ?結 ?論
針對目前河流湖泊人工打撈的方式,基于智慧物聯網技術研制了漂浮型電驅動水面漂浮物收集監測系統。通過傳感器可獲得水域漂浮垃圾收集狀態數據以及設備運行信息。應用數據庫對狀態數據、作業信息數據、控制指令數據等進行存儲解析和傳輸,同時接收PC端或者手機端的控制指令數據,隨時隨地對前端設備進行控制管理。
監測管理系統在流域的廣泛使用可逐步形成系統性服務平臺,該系統服務于水域園林用戶、行政管理部門、社會用戶及民眾,可兼容各種接入設備。依據大量的水面收集信息定期向社會發布漂浮物的流量狀態信息監控情況,給使用者提供水資源狀態預估和決策建議,為發揮社會層次價值提供公益性服務,提升環保產業運行效率,打造美好的人與自然和諧共存的生態環境。
參考文獻
[1] 應子翔,程都,楊佳瑤,等.水上漂浮式垃圾回收方法綜述[C]//第十八屆中國海洋(岸)工程學術討論會論文集. 舟山:中國海洋(岸)工程學會,2017:752?756.
YING Zixiang, CHENG Du, YANG Jiayao, et al. Overview of floating garbage recovery methods on water [C]// The 18th China Ocean (Coastal) Engineering Symposium. Zhoushan: China Ocean (Coastal) Engineering Committee, 2017: 752?756.
[2] 國家海洋局.2015 年中國海洋環境狀況公報[R].北京:國家海洋局,2015.
State Oceanic Administration, People′s Republic of China. China Marine Environment Bulletin 2015 [R]. Beijing: State Oceanic Administration, People′s Republic of China, 2015.
[3] 孫承君,蔣鳳華,李景喜,等.海洋中微塑料的來源分布及生態環境影響研究進展[J].海洋科學進展,2016,34(4):450?455.
SUN Chengjun, JIANG Fenghua, LI Jingxi, et al. Research progress in distribution source and ecological environmental impact of marine micro plastics [J]. Advances in marine science, 2016, 34(4): 450?455.
[4] 張麗珍,楊佺,呂超,等.小型水域水面漂浮物交替筐式收集裝置的設計[J].機械設計與研究,2016,32(6),118?123.
ZHANG Lizhen, YANG Quan, L? Chao, et al. Design of floater collector with alternate baskets in small waters [J]. Machine design and research, 2016, 32(6): 118?123.
[5] 曾義聰,劉建發,謝秋敏,等.水面漂浮垃圾清理機的設計研究[J].徐州工程學院學報,2013,28(1):69?73.
ZENG Yicong, LIU Jianfa, XIE Qiumin, et al. Design and research of surface floating garbage cleaner [J]. Journal of Xuzhou Institute of Engineering, 2013, 28(1): 69?73.
[6] 卞懷強.基于并聯機構的可變形水陸兩棲清理船設計與研究[D].上海:上海工程技術大學,2015.
BIAN Huaiqiang. Design and research of deformable amphibious cleanup based on parallel mechanism [D]. Shanghai: Shanghai University of Engineering Science, 2015.
[7] YU Wang. Aquatic environment monitoring using robotic sensor networks [D]. USA: Michigan State University, 2015.
[8] 徐靜波.水面漂浮物監測及估算系統開發與建設[J].江蘇水利,2018(8):51?57.
XU Jingbo. Development and construction of monitoring and estimating system for floating objects on water surface [J]. Jiangsu water resources, 2018(8): 51?57.
[9] 楊文俊,馮正鵬,唐祥甫,等.三峽水庫漂污物治理研究與實踐效果[J].水利發電學報,2009,28(6):83?87.
YANG Wenjun, FENG Zhengpeng, TANG Xiangfu, et al. Floating debris management research and practice effect of three gorges project [J]. Journal of hydropower, 2009, 28(6): 83?87.
[10] 蔡瑩,李章浩,李利,等.河道型水庫漂浮物綜合治理措施探究[J].長江科學院院報,2010,27(12):31?35.
CAI Ying, LI Zhanghao, LI Li, et al. Exploration of flotage comprehensive management measures of channel reservoir [J]. Journal of Yangtze River Scientific Research Institute, 2010, 27(12): 31?35.
