旋轉加速度計式重力梯度儀動態測量適應性能試驗與效果分析
2019-03-13 03:45:52李城鎖
導航定位與授時 2019年2期
楊 曄,李 達,李城鎖,高 巍
(天津航海儀器研究所,天津 300131)
0 引言
重力梯度儀是用于測量重力場梯度分布的精密設備,基于Bell Aerospace公司提出的旋轉加速度計測量原理的重力梯度儀(后文中簡稱梯度儀)是迄今唯一實用的近地表動態測量重力梯度儀[1-3]。在飛機等運動平臺上實現重力梯度測量,需采取減振和穩定平臺等一系列工程化方法,降低載體的動力學干擾[4-6]。本文結合科研試驗和實測數據來驗證工程化方法的有效性,為實現動態條件下重力梯度的有效測量奠定基礎。
1 動態測量誤差機理
如圖1所示,旋轉加速度計式重力梯度儀基于加速度計位置差分測量原理,通過機械旋轉的方式將重力梯度張量分量調制到系統旋轉頻率的二倍頻處,加速度計輸出與重力梯度張量分量之間的關系可表示為[7-8]:
(a1+a3)-(a2+a4)=2R(Γxx-Γyy)sin2ωt+
4RΓxycos2ωt
(1)
式中,a1、a2、a3、a4是4個加速度計的輸出,R是加速度計檢測質心到旋轉中心的距離,Γxx、Γyy、Γxy是重力梯度張量分量,ω是旋轉裝置的旋轉角速度。
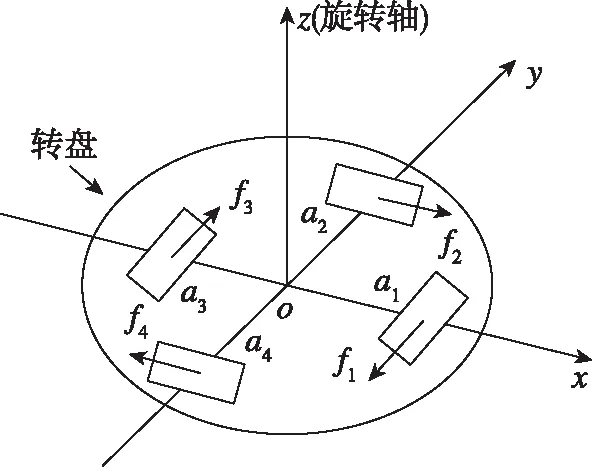
圖1 旋轉加速度計式重力梯度儀測量原理Fig.1 Measuring principle of gravity gradiometer with rotating accelerometer
1.1 載體線運動誤差機理
在動態條件下,載體水平線運動對加速度計組合輸出信號引起的牽連平動力干擾機理如下:
Aout(a0x,a0y)= [(K4-K2)a0y+(K1-K3)a0x]sinωt+
[(K4-K2)a0x-(K1-K3)a0y]cosωt
(2)
式中,Ki(i=1,2,3,4)是第i個加速度計的標度因數,a0x、a0y是載體東向、北向的線加速度。
Aout(a0z)=a0z[(Δβ1+Δβ3)-(Δβ2+Δβ4)]
(3)
式中,βi(i=1,2,3,4)是第i個加速度計敏感軸的垂向角度安裝誤差,a0z是載體的垂向加速度。
從式(2)、式(3)可以看出,線運動低頻處分量與梯度儀對稱安裝的加速度計標度因數不一致誤差或敏感軸俯仰角誤差相耦合,匯入重力梯度信號形成測量誤差。
1.2 載體角運動誤差機理
在動態條件下,載體角運動對加速度計組合輸出信號帶來的牽連切向力與向心力干擾機理如下[12]:

2ΩxΩyRcos2ωt
(4)
式中,Ωx、Ωy是敏感器的東向、北向角速度。
(5)


2 動態測量工況分析與抑制方法
2.1 振動譜分析
以國內航空遙感作業常用的Y-12固定翼飛機的實際飛行參數為例,其典型工況下載體的三方向線加速度如圖2所示,對其進行功率譜分析,得到機載條件振動譜,如圖3所示。
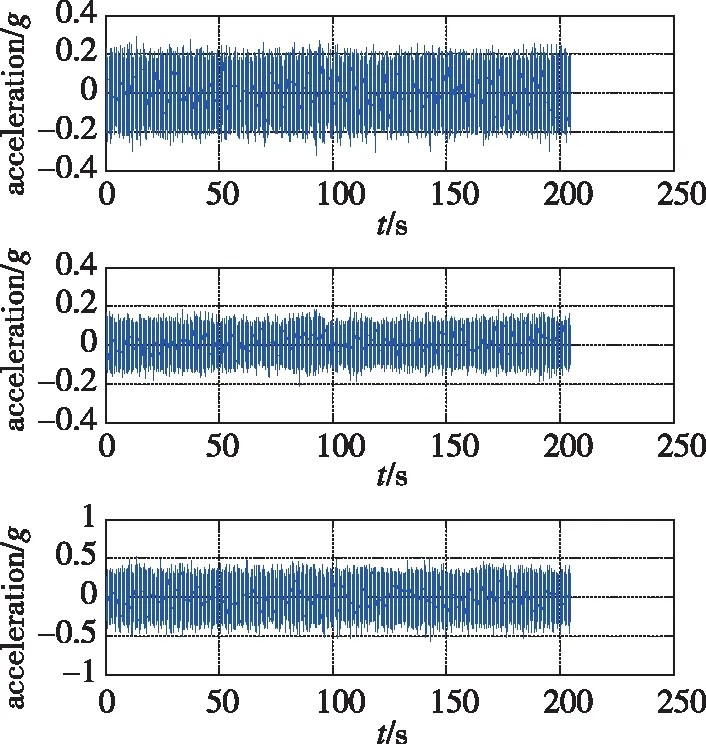
圖2 機載條件載體的東向線加速度(上)、北向線加速度(中)和天向線加速度(下)Fig.2 East acceleration (top), north acceleration (middle) and vertical acceleration (bottom) of the airborne conditional carriers

圖3 機載條件載體的東向線加速度(上)、北向線加速度(中)和天向線加速度(下)功率譜密度Fig.3 Power spectral density of east acceleration (top), north acceleration (middle) and vertical acceleration(bottom) of the airborne conditional carriers
從圖2可知,機載條件下垂向振動幅度比水平振動幅度大1倍左右,且在垂向振動傳遞過程中直接與加速度計敏感軸垂向安裝誤差相耦合,需重點抑制。
2.2 搖擺譜分析
在固定翼飛機平穩飛行過程中,不僅存在3個方向的線運動,還存在三自由度的角運動,其角速度如圖4所示,對其進行功率譜分析,得到機載條件搖擺譜,如圖5所示。

圖4 機載條件載體的東向角速度(上)、北向角速度(中)和天角速度(下)Fig.4 East angular velocity (top), north angular velocity (middle) and vertical angular velocity (bottom) of the airborne conditional carriers

圖5 機載條件載體的東向角速度(上)、北向角速度(中)和天向角速度(下)功率譜密度Fig.5 Power spectral density of east angular velocity (top), north angular velocity (middle) and vertical angular velocity(bottom) of the airborne conditional carriers.
從搖擺譜可知,機載條件下在16.8Hz和29Hz附近存在2個諧波頻率,這對穩定平臺的設計提出了嚴苛的要求。
2.3 動態測量技術關鍵
利用減震裝置和穩定平臺等一系列物理措施降低載體運動對重力梯度測量的影響,是實現重力梯度動態測量的關鍵措施之一[10-11]。
雖然在系統設計中采取加速度計標度一致性調整環節來抑制載體水平運動擾動的影響。但是還需要通過對機載運動環節以及測量原理中旋轉調制特性和敏感元件性能進行分析,設計專門的氣彈簧輔助海綿減震材料的寬頻可變剛度復合減震裝置,以適應不同工況條件對重力梯度測量的影響。在保證敏感元件在載波頻率附近幅頻響應高精度的同時,大幅抑制載體機動過程中加速度計非線性環節帶來的不確定影響[14-17]。
采用穩定平臺是抵御角運動干擾的主要措施。由式(4)、式(5)可知,經穩定平臺隔離的殘余角運動高階項進入重力梯度信號,因此,動態重力梯度測量需對慣性穩定平臺的角速度隔離剛度和帶寬性能提出嚴格要求,保證對載體角運動的衰減程度[13,18]。
具體設計工作不在此贅述,本文僅提供對試驗過程和效果的描述。
3 動態適應性試驗
針對重力梯度飛行測量,開展梯度儀地面模擬動態適應性試驗,考核模擬機載條件下梯度儀輸出信號特性,為系統航空試驗和后續改進提供試驗依據。
3.1 振動試驗實施與效果分析
3.1.1 垂向振動試驗
梯度儀垂向振動試驗如圖6所示,輸入的垂向線振動激勵功率譜密度為圖3所示天向線振動譜高頻部分(5Hz以上),解調后重力梯度信號如圖7所示。
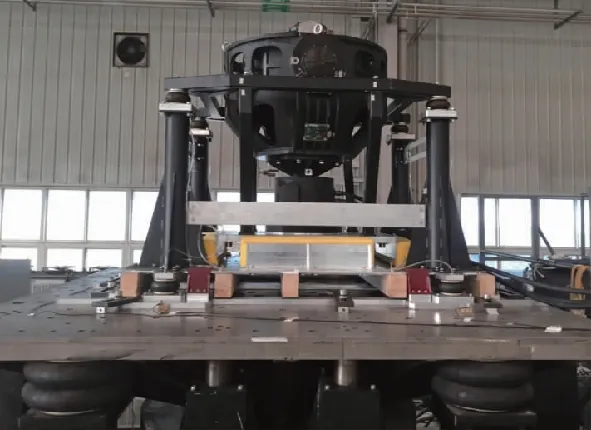
圖6 重力梯度儀垂向振動試驗現場圖Fig.6 Field diagram of vertical vibration test for gravity gradiometer
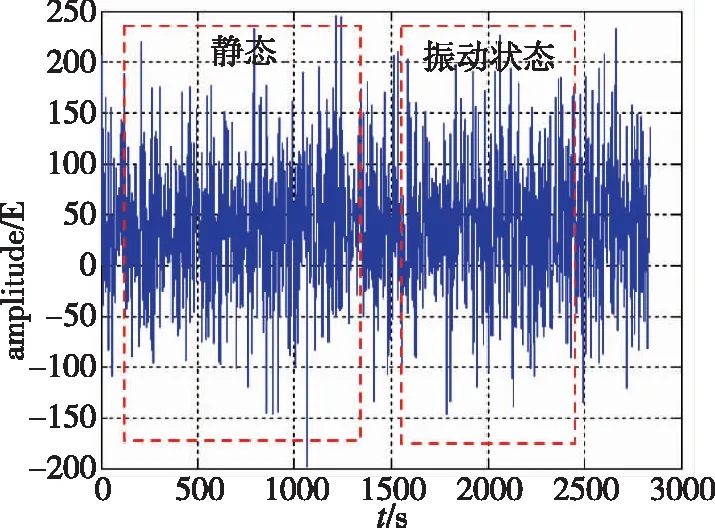
圖7 重力梯度信號垂向振動/靜止狀態對比圖(Γxx-Γyy)Fig.7 Comparison of vertical vibration and static state of gravity gradient signals (Γxx-Γyy)
如圖7所示,在高性能減震裝置的作用下,梯度儀可以在機載垂向振動條件下獲得穩定的重力梯度信號,系統輸出在靜態/垂向振動狀態間沒有明顯的變化,與靜態下信號噪聲大致相當,且信號均值變化小于20E。
3.1.2 水平振動試驗
梯度儀水平振動試驗如圖8所示,輸入的水平線振動激勵功率譜密度為圖3所示水平線振動譜高頻部分(5Hz以上),系統輸出重力梯度信號Γxx-Γyy如圖9所示,重力梯度信號Γxy如圖10所示。

圖8 重力梯度儀水平振動試驗現場圖Fig.8 Field diagram of horizontal vibration test for gravity gradiometer
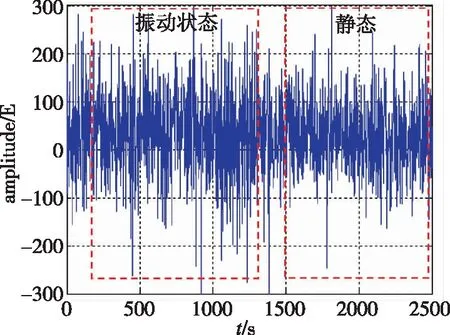
圖9 重力梯度信號水平振動/靜止狀態對比圖(Γxx-Γyy)Fig.9 Comparison of horizontal vibration and static state of gravity gradient signals(Γxx-Γyy)
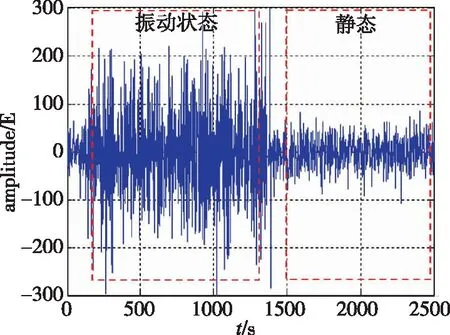
圖10 重力梯度信號水平振動/靜止狀態對比圖(Γxy)Fig.10 Comparison of horizontal vibration and static state of gravity gradient signals (Γxy)
如圖9、圖10所示,在高性能減震裝置的作用下,梯度儀可以在機載水平振動條件下正常工作。但由于動態條件下對表標度因數一致性調整環節也形成干擾,載體水平運動低頻分量與其不一致誤差相耦合,匯入重力梯度信號(尤其是Γxy信號)造成重力梯度信號低頻噪聲較靜態增加了35%(0.01~0.1Hz)。
3.2 搖擺試驗實施與效果分析
3.2.1 水平搖擺試驗
如圖11~圖13所示,水平搖擺試驗中典型解調輸出的梯度信號如圖12、圖13所示(搖擺角度為2°,搖擺周期為20s),從中可以看出,在654s系統由靜態開始搖擺時,梯度信號Γxx-Γyy出現64.5E的階躍現象,梯度信號Γxy出現-40.8E的階躍現象。與水平線振動輸出信號噪聲增大原因相同,水平搖擺產生的低頻線運動與加速度計標度因數不一致誤差相耦合,造成重力梯度信號產生階躍。

圖11 梯度儀水平搖擺試驗現場圖Fig.11 Field diagram of horizontal swing test for gravity gradiometer
圖12 重力梯度信號水平搖擺/靜止狀態對比圖(Γxx-Γyy)Fig.12 Comparison of horizontal swing and static state of gravity gradient signals (Γxx-Γyy)

圖13 重力梯度信號水平搖擺/靜止狀態對比圖(Γxy)Fig.13 Comparison of horizontal swing and static state of gravity gradient signals (Γxy)
3.2.2 方位搖擺試驗
梯度儀方位搖擺試驗重力梯度信號如圖14、圖15所示(搖擺角度為5°,搖擺周期為10s)。結果表明,梯度儀可通過穩定平臺有效隔離載體方位角運動,搖擺狀態下輸出的兩路重力梯度信號噪聲水平與靜態下信號噪聲相當。

圖14 重力梯度信號方位搖擺/靜止狀態對比圖(Γxx-Γyy)Fig.14 Comparison of azimuth swing and static state of gravity gradient signals (Γxx-Γyy)
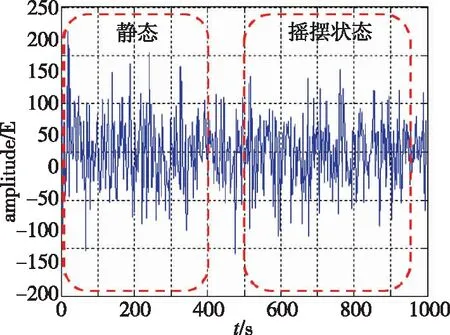
圖15 重力梯度信號方位搖擺/靜止狀態對比圖(Γxy)Fig.15 Comparison of azimuth swing and static state of gravity gradient signals(Γxy)
4 試驗總結與展望
上述實驗初步驗證了重力梯度儀在模擬機載條件下可正常反映敏感器噪聲水平,但在水平線運動激勵下,重力梯度信號輸出較靜態下輸出信號噪聲增大了35%。因此,需提高對表標度因數一致性動態調整控制性能以抑制水平運動對重力梯度測量的影響。此外,以上試驗的數據均在地面模擬條件下獲得,與航空試驗的高動態環境仍存在差距。后續計劃開展車載與航空試驗,進一步驗證梯度儀緩沖、減震裝置的有效性,提高系統的動態測量能力,這將面臨更加復雜和困難的技術挑戰。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
