一種眼軸長度測量系統(tǒng)的設計實現(xiàn)及其關鍵技術研究
2019-03-21 04:26:46李愷寧李奇原王立偉李躍杰
醫(yī)療衛(wèi)生裝備 2019年3期
李愷寧,李奇原,王立偉,李躍杰
(中國醫(yī)學科學院北京協(xié)和醫(yī)學院生物醫(yī)學工程研究所,天津 300192)
0 引言
白內(nèi)障作為最常見的眼科疾病之一,多發(fā)病于中老年人群。對眼軸長度的精準測量將關系到白內(nèi)障手術中植入人工晶狀體度數(shù)的準確性,同時也密切關系到術后的屈光誤差[1-3]。另外,近年來我國青少年兒童近視率居高不下,而近視程度與眼軸長度具有正相關性,眼軸長度也是區(qū)別真性近視與假性近視的重要依據(jù)[4-5]。因此,高精度的眼軸長度測量方法是十分必要的,其對于眼科疾病的預防和臨床診治都有重要的實用意義。
現(xiàn)有的眼軸長度測量方法主要有超聲生物測量和非接觸式光學生物測量2種。A型超聲用于正常眼的眼軸長度測量時具有良好的準確性,但對一些眼科疾病等測量重復性較差[6]。B型超聲測量不受屈光介質(zhì)渾濁度影響,但測量方法較為煩瑣且費時[7]。A、B型超聲聯(lián)合測量方法利用了二者各自的優(yōu)點[8-9],但需要更為復雜的操作,且一次測量涉及2次測量誤差。非接觸式光學生物測量利用光學相干技術來測量眼軸長度,主要有基于部分相干干涉技術(partial coherence interferometry,PCI)的測量方法和基于低相干反射技術(low coherence optical reflectometry,LCOR)的測量方法[10-11]。相較于傳統(tǒng)超聲生物測量方法,非接觸式光學生物測量方法具有高分辨力和非接觸性的優(yōu)點,同時其測量結(jié)果的重復性要優(yōu)于A型超聲[12-14]。但非接觸式光學生物測量的準確性依賴于掃描光線從眼底反射的強度,因此屈光介質(zhì)的渾濁、病變或病患無法固視等因素都影響測量數(shù)據(jù)的準確性。
本文設計了一套眼軸長度測量系統(tǒng),搭建了測量光路,對其中的測量控制以及測量過程中的焦點同步等關鍵技術進行了研究,并通過自制測試模塊及人眼進行了測量實驗驗證。
1 系統(tǒng)設計與實現(xiàn)
1.1 基本原理
光學相干技術的基本原理如圖1所示[15]。低相干光源發(fā)出的光經(jīng)過分光鏡分為2路,一路射入?yún)⒖急郏硪宦飞淙氪郎y樣品。由參考臂反射鏡返回的參考光與待測樣品不同深度界面反射回的探測光束在分光鏡上匯合并由接收器接收,兩者之間的光程差在光源的一個相干長度范圍內(nèi)時發(fā)生干涉,當光程剛好相等時獲得的相干信號強度最大。為了測量待測樣品內(nèi)部不同深度的信息,只需要移動參考臂反射鏡的位置使參考光信號與待測樣品不同深度界面反射回的光信號發(fā)生干涉,記錄每一次干涉信號強度最大時參考臂反射鏡的對應位置,此位置信息反映了待測組織內(nèi)部不同結(jié)構(gòu)的相對空間位置[15]。
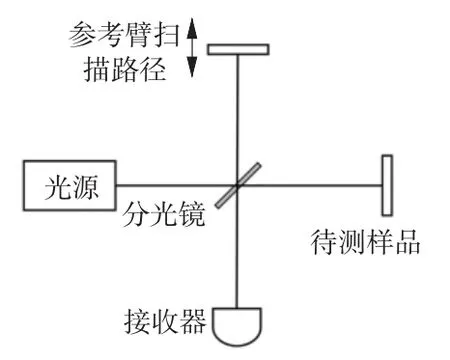
圖1 光學相干技術基本原理圖
本文設計的眼軸長度測量系統(tǒng)的整體結(jié)構(gòu)圖如圖2所示,系統(tǒng)主要分為測量光路和測量控制系統(tǒng)2個部分。測量光路主要由超輻射發(fā)光二極管(super luminescent diode,SLD)光源、光環(huán)行器、光纖耦合器、參考臂及樣品臂組成。測量控制系統(tǒng)由光電檢測模塊、數(shù)據(jù)采集卡及運動控制卡組成,并由計算機軟件編程實現(xiàn)控制。采用SLD作為系統(tǒng)光源,中心波長為1 060 nm,半波寬度為50 nm。光源經(jīng)光環(huán)行器、光纖耦合器分別入射到被測眼組織及參考臂,光環(huán)行器的另一路輸出接至平衡光電放大器作差分放大。參考臂反射鏡與步進電動機控制的掃描機構(gòu)相連。測量過程中,參考臂反射鏡通過步進電動機帶動,由計算機通過運動控制卡驅(qū)動實現(xiàn)往復掃描運動,匹配樣品臂反射回的探測光信號,當參考臂返回的參考光信號與樣品臂被測眼組織各界面反射回的檢測光信號光程相等時,產(chǎn)生相干信號。參考臂附帶有位移編碼器,其信號由運動控制卡同步采集,用于精確位移標定。為了更好地獲取到眼組織內(nèi)不同層面的反射信號,設計了焦點同步系統(tǒng),通過運動控制卡進行驅(qū)動,實現(xiàn)控制樣品臂聚焦透鏡的步進電動機(以下簡稱“樣品臂步進電動機”)與控制參考臂反射鏡的步進電動機(以下簡稱“參考臂步進電動機”)的同步運動。系統(tǒng)在控制樣品臂步進電動機與參考臂步進電動機的同時對光電檢測模塊檢測到的干涉信號以及位移編碼器發(fā)出的信號進行同步采集,并經(jīng)數(shù)據(jù)處理后獲得眼組織結(jié)構(gòu)位置信息。本文主要是對測量控制系統(tǒng)進行設計以及對實時焦點同步技術進行研究。
系統(tǒng)中光源的選取主要考慮了眼組織對不同波長光的透射率,其關系如圖3所示[16-17]。眼組織中的主要成分是水,而水的光吸收特性導致其對波長遠大于800 nm的光源有較大的衰減。整個掃描過程中,在1 060 nm波長的光源下由水吸收造成的功率損失約48%,在800 nm波長的光源下由水吸收造成的功率損失約5%。然而根據(jù)美國國家標準協(xié)會(American National Standard Institute,ANSI)標準,人眼的最大允許曝光量隨波長增加而增加,因此可以通過在較長波長上使用較高的入射功率提高靈敏度。1 000~1 100 nm波長范圍內(nèi)的光源在不透明眼介質(zhì)中衰減較小,對眼內(nèi)出現(xiàn)屈光介質(zhì)渾濁等情況有一定的適用性[16-17]。因此,選擇1 060 nm波長的SLD光源作為系統(tǒng)光源,控制角膜處入射光功率小于1.5 mW,在符合ANSI標準的同時滿足基本測量要求。
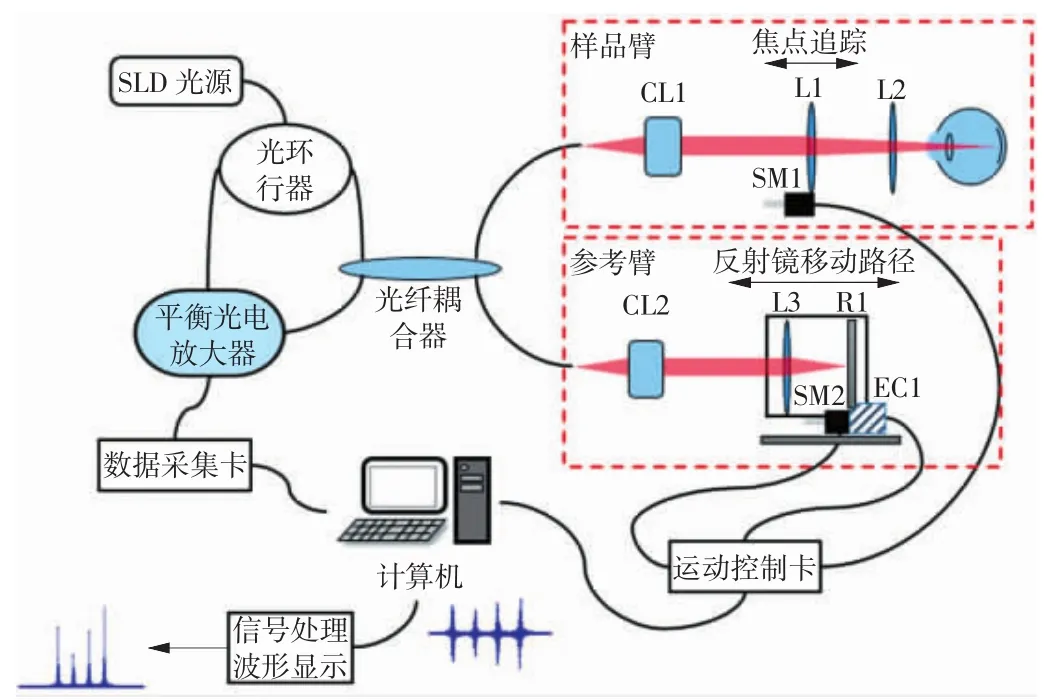
圖2 眼軸長度測量系統(tǒng)結(jié)構(gòu)圖
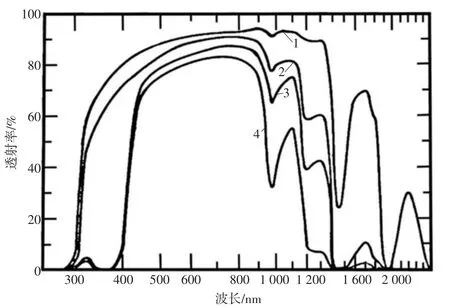
圖3 人眼組織對不同波長光的透射率
1.2 焦點同步實現(xiàn)
眼軸是指由角膜正中到視神經(jīng)與視網(wǎng)膜黃斑中心窩之間的一條假設線,正常人眼軸的平均長度為24 mm左右。光信號在人眼中衰減較大,如檢測光不能較好地在待測眼內(nèi)組織結(jié)構(gòu)層面上聚焦,會降低樣品臂反射的光信號強度,進而降低獲得的相干光信號強度,降低檢測信噪比。為此,設計了一套焦點同步系統(tǒng),將掃描光束同步聚焦于待測眼組織內(nèi)的各個界面,以提高信噪比。
為實現(xiàn)測量過程中對眼組織各界面的同步聚焦,本文參考1997年墨爾本大學的Liou等[18]提出的人眼模型,利用ZEMAX仿真軟件對人眼模型及樣品臂光路進行仿真設計,樣品臂光路示意圖如圖4所示。CL1為準直鏡,調(diào)整調(diào)焦透鏡L1的位置可以改變測量光線的聚焦位置,同時經(jīng)過固定的聚焦透鏡L2可以使測量光線在人眼中不同層面聚焦。對角膜、晶狀體前/后表面及視網(wǎng)膜位置聚焦點進行仿真計算,得到測量光束在這些位置聚焦時調(diào)焦透鏡應在的位置。在此基礎上,結(jié)合調(diào)焦透鏡的位置曲線,通過軟件編程,實施測量過程中樣品臂步進電動機與參考臂步進電動機的同步位移控制,實現(xiàn)檢測光在眼組織內(nèi)不同界面的實時聚焦,從而提高信噪比。
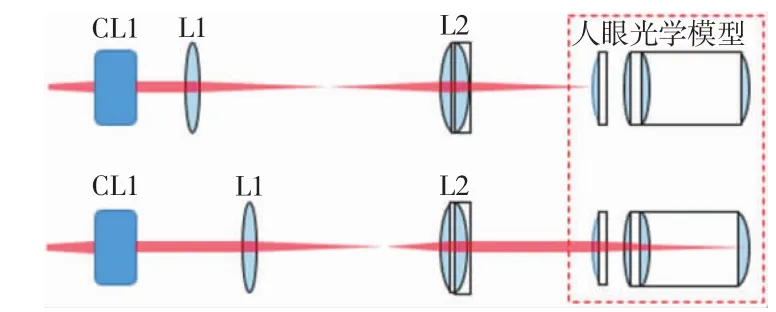
圖4 樣品臂光路示意圖
1.3 測量控制系統(tǒng)設計
測量控制系統(tǒng)的原理框圖如圖5所示。該系統(tǒng)主要由光電檢測模塊、運動控制卡、數(shù)據(jù)采集卡組成,并通過計算機進行編程控制。計算機對運動控制卡I/O口進行讀寫操作,并通過驅(qū)動模塊將其輸出信號轉(zhuǎn)化為步進電動機運動控制信號,從而對參考臂的反射鏡以及樣品臂的調(diào)焦透鏡進行同步控制。數(shù)據(jù)采集卡用于采集光電放大器輸出信號,實時保存并傳輸至計算機處理,同時與運動控制卡采集得到的編碼器位移信息結(jié)合標定,得到眼組織內(nèi)部各層次的位置信息。
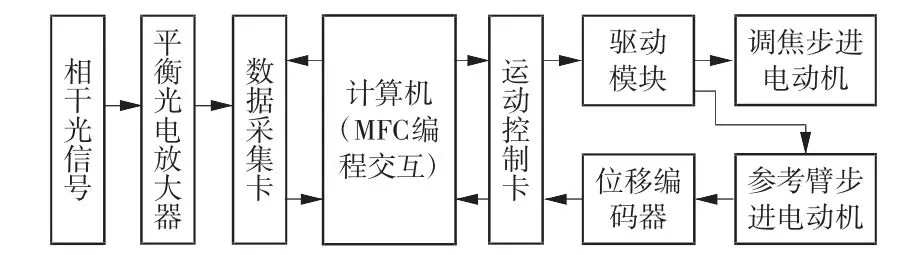
圖5 測量控制系統(tǒng)原理框圖
1.3.1 控制系統(tǒng)搭建
控制軟件利用C++平臺實現(xiàn)編程開發(fā),通過對數(shù)據(jù)采集卡的I/O口進行讀寫操作以及對時鐘信號與觸發(fā)信號的精確編程控制,實現(xiàn)測量系統(tǒng)的整體控制。本文選用凌華科技有限公司的PCI-8136和DAQ-2502多功能采集卡作為運動控制卡和數(shù)據(jù)采集卡。2款采集卡均通過外設部件互連標準(peripheral component interconnect,PCI)接口與計算機通信,不僅可以實現(xiàn)高達133 MB/s的傳輸速率,還可以將數(shù)據(jù)儲存并實時傳輸至計算機處理。為了實現(xiàn)高精度的位移測量,選用德國SIKO公司的MSK1000ZM位移編碼器,其分辨力高達1 μm。
1.3.2 系統(tǒng)控制軟件設計
本文利用微軟基礎類庫(Microsoft Foundation Class,MFC)對整個系統(tǒng)控制軟件進行界面設計,如圖6所示。軟件整體分為采集控制、單點調(diào)節(jié)、數(shù)據(jù)處理3個大功能框架,每個功能通過與之相對應的按鍵控制。通過該軟件可以實現(xiàn)整個系統(tǒng)的自動檢測、自動歸零、單點調(diào)試以及曲線繪制等操作。
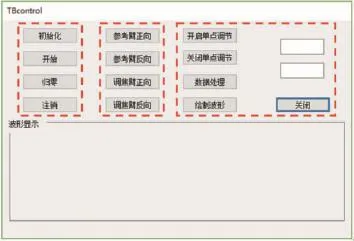
圖6 系統(tǒng)控制軟件界面
軟件的控制流程圖如圖7所示。系統(tǒng)初始化操作包括采集卡注冊、管腳使能、寫時鐘同步信號與步進電動機控制信號。通過外部觸發(fā)實現(xiàn)運動控制卡與數(shù)據(jù)采集卡的同步觸發(fā),系統(tǒng)開始循環(huán)檢測。軟件循環(huán)判斷整體檢測是否完成,當檢測完成后控制參考臂和樣品臂步進電動機實現(xiàn)快速回位,準備下一次掃描,同時數(shù)據(jù)采集卡將數(shù)據(jù)傳輸至計算機進行處理與計算。
數(shù)據(jù)處理是對采集卡緩存中數(shù)據(jù)的進一步操作,也是控制軟件中的重要部分,其整體流程如下:通過幅值轉(zhuǎn)換將采集到的14位(bit)二進制數(shù)據(jù)轉(zhuǎn)換為信號電壓值,通過希爾伯特變換對原始數(shù)據(jù)進行包絡提取,后經(jīng)40次疊加平均對隨機噪聲進行濾除,再根據(jù)檢測結(jié)果的波峰寬度對處理后的信號進行區(qū)域劃分,結(jié)合眼組織生理結(jié)構(gòu)信息以及對信號的主觀判斷,對每個區(qū)域內(nèi)波峰進行峰值提取,最后進行位移標定。本文通過步進電動機轉(zhuǎn)速與采樣點數(shù)之間的關系計算得到波峰間的位置信息,結(jié)合編碼器得到的位移信息進行聯(lián)合標定,得到最終的眼組織結(jié)構(gòu)信息。
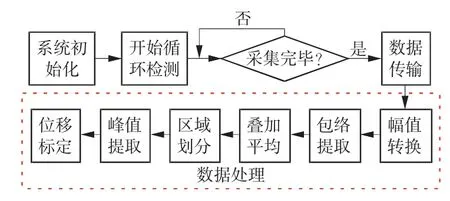
圖7 軟件控制流程圖
2 實驗驗證
本文對平面反射鏡進行了掃描采集實驗。在樣品臂合適的位置放置平面鏡,并通過測量控制軟件控制實現(xiàn)全程掃描的測試,掃描結(jié)果如圖8所示。從圖8中可以看到一個明顯的峰值,該峰值即為參考臂平面鏡反射回的參考光與樣品臂平面反射鏡反射的掃描光束在等光程處的相干信號。該實驗驗證了本文設計的系統(tǒng)可以獲得被測樣品界面信息。
本文利用自制的測試模塊進行了掃描采集實驗。測試模塊由3塊不同厚度的K9平面玻璃構(gòu)成,標稱厚度分別為0.5、1.5和1.2 mm,標稱折射率為1.516。經(jīng)千分尺測量,厚度分別為0.510、1.510和1.205 mm,3塊平面玻璃的間距分別為3.040和24.830 mm,用于模擬眼角膜、晶狀體和視網(wǎng)膜反射層。實驗時,將測試模塊固定于檢測光路中,先固定調(diào)焦透鏡,使測量光束焦點對準測試模塊的第一塊平面玻璃并進行數(shù)據(jù)采集;同樣固定調(diào)焦透鏡使焦點分別對準第二塊、第三塊平面玻璃進行數(shù)據(jù)采集;最后通過調(diào)焦透鏡與參考臂反射鏡的運動匹配進行了全程變焦掃描。對測試模塊檢測的全部結(jié)果如圖9所示。從圖9(a)可以看出,當焦點聚焦于第一個界面時,檢測得到的第一個界面信息幅度較高,后2個玻璃面的信息幅度很低;圖9(b)、(c)分別反映了當調(diào)焦鏡將入射光聚焦于第二、第三個玻璃界面時的檢測結(jié)果,可以發(fā)現(xiàn)僅聚焦界面的干涉信號幅度較高,其他界面的干涉信號幅度較低;圖9(d)是通過焦點同步技術掃描得到的檢測結(jié)果波形圖,從圖中可以看出各個玻璃表面的檢測信息均得到明顯改善。
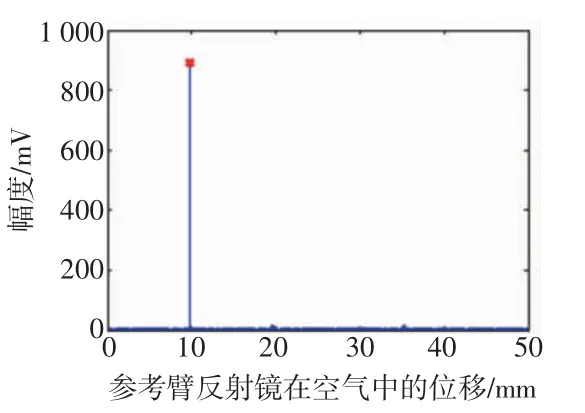
圖8 平面鏡信號掃描檢測波形圖
本文對變焦距掃描采集得到的信號進行包絡提取、疊加平均等操作后,對采集數(shù)據(jù)進一步計算,得到采集信號對應模擬眼的各界面厚度,并進行多次重復掃描實驗,將系統(tǒng)測量得到的數(shù)據(jù)與模擬眼的實際參數(shù)進行對比,結(jié)果見表1。通過對比可以證明該系統(tǒng)能夠精確地完成對測試模塊的長度測量。
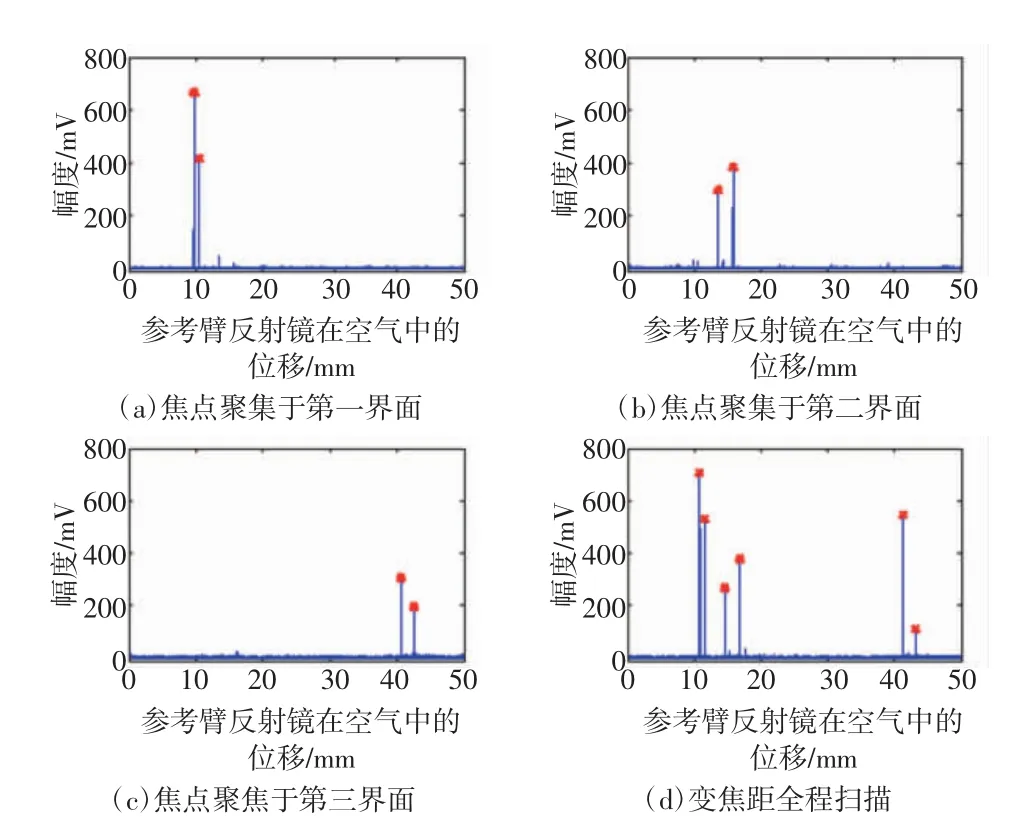
圖9 對測試模塊掃描檢測結(jié)果波形圖
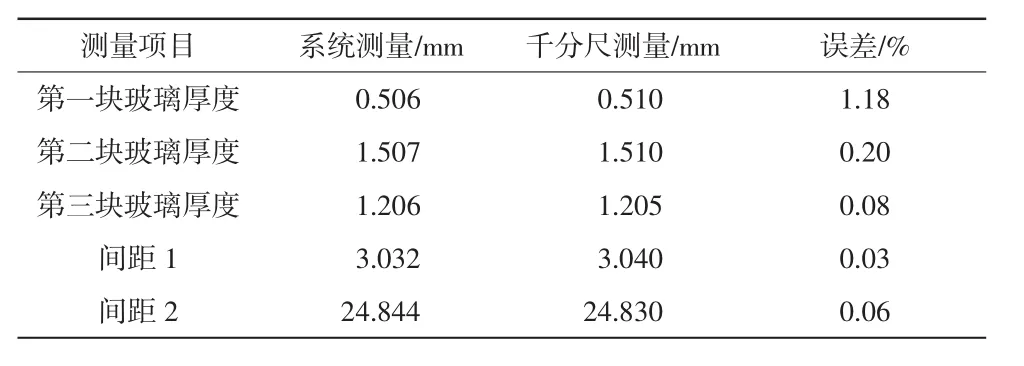
表1 系統(tǒng)測量數(shù)據(jù)與千分尺測量數(shù)據(jù)對比表
隨后本研究針對人眼數(shù)據(jù)進行了初步測試,測量方法與上述方法相同,受試者為成年男性。受試者端坐于測量系統(tǒng)前,左眼直視掃描鏡,通過緊盯系統(tǒng)的內(nèi)固視光點實現(xiàn)視線的固定,利用焦點同步技術通過軟件控制實現(xiàn)整體檢測,實驗結(jié)果如圖10所示。測量得到的結(jié)果為參考臂反射鏡在空氣中的位移,對應眼組織內(nèi)各層次厚度需要除以該組織的折射率,本文所采用的眼組織平均折射率[19]為1.354 9。測量得到的受試者眼軸整體長度S1約為24 624 μm(即24.624 mm),眼角膜厚度 S2為 530 μm,前房深度S3為2 709 μm,晶狀體厚度S4為4 598 μm,屬于正常眼組織長度范圍。另外,在眼組織內(nèi)部也采集到其他的小信號,懷疑是受試者眼內(nèi)存在一定的白內(nèi)障導致。本文利用天津邁達醫(yī)學科技股份有限公司的眼科MD-2300S超聲診斷儀(A型超聲)進行眼軸長度測量,并進行數(shù)據(jù)對比,結(jié)果如圖11所示,測量得到眼軸長度為24.29 mm,前房深度為2.44 mm,晶狀體厚度為4.77 mm。對比發(fā)現(xiàn)本文系統(tǒng)測量結(jié)果與A型超聲測量結(jié)果基本一致,考慮到采用A型超聲測量眼軸長度時對受試者眼組織的壓迫,因此本文系統(tǒng)測量值略高于A型超聲測量數(shù)據(jù)。該實驗驗證了本文系統(tǒng)利用焦點同步技術對眼組織進行測量能夠較為準確地獲得受試者眼組織內(nèi)各界面位置信息。
3 結(jié)論
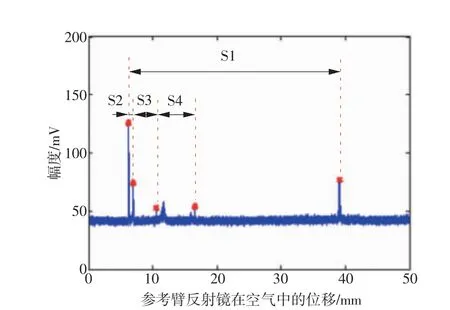
圖10 系統(tǒng)測量眼軸長度信號波形圖
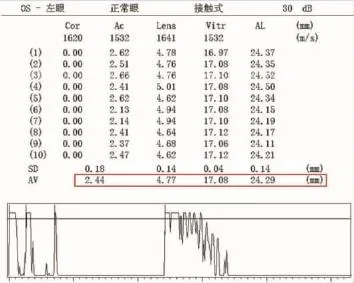
圖11 MD-2300S測量眼軸長度結(jié)果
為獲取眼軸長度及眼組織內(nèi)各界面之間的位置信息,本文基于光學相干技術,采用波長1 060 nm的SLD光源作為掃描光源,搭建了一套眼軸長度測量系統(tǒng),并針對其系統(tǒng)控制以及焦點同步等關鍵技術進行了研究。在對采集到的信號進行分析處理時,通過常規(guī)時間對準方式與編碼器位移標定相結(jié)合的方式,進一步精確了待測眼組織的空間結(jié)構(gòu)信息,提高了系統(tǒng)分辨力。為進一步提高眼組織內(nèi)部的檢測信號強度,本文提出了一種動態(tài)焦點同步技術的設計方案,并利用自制測試模塊進行實驗研究,結(jié)果表明:該套系統(tǒng)能夠精確采集到被測樣品各個界面的空間位置信息,并結(jié)合自制測試模塊的標稱參數(shù)分析,可以發(fā)現(xiàn)該套系統(tǒng)有很高的分辨力。本文也進行了生物實驗的初步探索,結(jié)果顯示:眼軸長度測量系統(tǒng)和焦點同步與測量控制技術方案可有效增強眼組織內(nèi)各界面信息,提高信噪比;結(jié)合A型超聲測量數(shù)據(jù)進行對比分析,該系統(tǒng)測量結(jié)果與A型超聲測量結(jié)果有較好的一致性。本文為測量控制系統(tǒng)設計了計算機軟件進行整體控制,方便交互,能夠快速、便捷地獲取到被測物體信息。通過對眼軸長度測量系統(tǒng)中焦點同步及測量控制技術的研究探索,能夠更好地對眼軸長度及其內(nèi)部各界面信息進行判斷與測量,為眼組織疾病的診斷奠定了實驗基礎。
針對本文的研究內(nèi)容,該系統(tǒng)仍有需要改進和完善的地方。例如提高系統(tǒng)的位移控制精度,從而進一步提高系統(tǒng)分辨力;通過有源放大器與濾波器進行信號處理,對測量控制系統(tǒng)進一步優(yōu)化,研究更為有效的信號處理算法,從而降低系統(tǒng)噪聲,提高信噪比;探索適用性更廣的眼組織模型,提高系統(tǒng)的應用范圍等。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12