面齒輪傳動嚙合剛度分析與修形減振優化
2019-03-23 07:30:14付學中方宗德彭先龍
振動與沖擊 2019年5期
付學中, 方宗德, 賈 超, 彭先龍
(1. 西北工業大學 機電學院,西安 710072;2.西安科技大學 機械工程學院,西安 710054)
輪齒變形和嚙合剛度的精確計算是研究輪齒齒面修形、振動與噪聲、動態特性、壽命預測、故障診斷的基礎[1-2],也是確定齒輪傳動系統內部附加動載荷、齒面載荷分布及齒間載荷分配系數的重要因素。關于輪齒變形和嚙合剛度的計算方法[3-4],國內外學者已進行了大量的研究,并形成了以材料力學方法和數學彈性力學方法(即保角映射法)為代表的理論計算方法、以邊界元法和有限元法為代表的數值計算方法。
材料力學方法是使用最早應用最廣的一種方法,以Ishikawa公式和Weber-Banaschek公式最具代表性[5],前者在日本和國內應用較多,后者在國外應用較多[6]。但材料力學方法因對精確漸開線齒形進行了簡化(如Ishikawa公式中將輪齒簡化為長方形與梯形的組合、Weber-Banaschek公式中將輪齒簡化為變截面懸臂梁),并忽略了齒根過渡曲線的影響,致使計算精度和可靠度較低。數學彈性力學方法是基于彈性力學理論和復變函數保角映射理論,先將齒輪的曲線邊界映射成直邊邊界,再求解輪齒的半邊界體在集中力作用下的受載變形[7-8]。數學彈性力學方法計算精度依賴于映射函數的精度,但合理選取映射函數是非常困難的,且該方法只適用直齒輪平面問題,并不可直接應用于斜齒輪問題。另外,材料力學方法和數學彈性力學方法均假設嚙合線上各點位移相同,且載荷沿接觸橢圓長軸分布均勻,這與實際嚴重不符,也無法考慮安裝與制造誤差、齒面誤差與修形的影響,更難以描述輪齒復雜的幾何形狀、實際受載狀況及邊界條件。數值計算方法則有效克服了上述不足[9-11],尤其是有限元法在工程中已得到廣泛應用,采用有限元法分析錐齒輪傳動、準雙曲面齒輪傳動的變形和嚙合剛度,其計算結果精度較高[12]。
面齒輪傳動是航空航天領域先進的新型傳動,在直升機均載分流傳動方面優勢明顯[13],但面齒輪齒面復雜[14],齒厚沿齒寬變化較大,故準確求得面齒輪傳動嚙合剛度的解析式極其困難。目前,國內外僅見少量關于面齒輪傳動嚙合剛度計算方法的公開文獻,研究也有待進一步深入。李政民卿等將面齒輪齒形近似成由沿齒高或齒寬方向變化的一系列切薄片組成,采用材料力學方法推導了面齒輪嚙合剛度計算公式,并分析得到了壓力角、模數及齒寬等設計參數對面齒輪嚙合剛度的影響[15-16],但因采用的是簡化后的當量齒形,前述材料力學方法的固有缺陷并未改進。唐進元等[17]提出將面齒輪傳動傳動誤差換算成沿嚙合線方向的輪齒彈性變形量,并按輪齒剛度定義計算嚙合剛度的方法,但是面齒輪傳動承載傳動誤差采用商業有限元軟件ABAQUS求解,存在計算時間長、前后處理操作繁瑣、計算效率低等問題,且不利于將其嵌入到優化設計等相關程序中去。此外,以上研究均是針對面齒輪傳動理論齒面,并未考慮變位、小輪偏置、安裝誤差和齒面修形等對嚙合剛度的影響。
本文基于面齒輪傳動承載接觸分析(LTCA)技術,建立了面齒輪傳動嚙合剛度求解模型,分析了變位、小輪偏置和安裝誤差對面齒輪傳動綜合嚙合剛度均值和波動幅值的影響,并將LTCA技術與遺傳算法相結合,建立了以修形參數為優化變量,以綜合嚙合剛度波動幅值最小為目標的面齒輪傳動修形減振優化模型,為進行面齒輪傳動系統動力學分析和修形齒面設計提供理論參考。
1 面齒輪傳動嚙合剛度求解
本文采用Zhang等[18-19]提出的LTCA技術分析面齒輪傳動,該方法采用三維有限元法、柔度矩陣及數學規劃法求解輪齒的三維彈性接觸,成功地結合了齒輪幾何分析和力學分析,是獲得加載條件下輪齒工作性能的重要分析工具,且其高精確性和有效性已被試驗所證實[20-21]。本方法優點有:①含齒根過渡曲面在內的面齒輪全齒面齒廓由刀具展成獲得,齒形未進行任何簡化,同時還考慮了輪體的輪緣,并自動生成有限元網格,單元形狀規整,故模型本身具有很高的精度;②有限元法計算輪齒工作齒面結點柔度系數時只需進行一次,而嚙合周期內不同嚙合位置的接觸線離散點法向柔度矩陣只需重新插值即可,計算量小,耗時少,效率高。
進行面齒輪傳動LTCA前,需要先做如下準備工作:①獲得綜合考慮變位[22]、小輪偏置[23]、齒面修形的面齒輪傳動大、小輪全齒面輪齒有限元模型;②建立含軸向位移誤差Δq、偏置誤差ΔE、軸夾角誤差Δγ的嚙合坐標系,將大、小輪齒面坐標變換到嚙合坐標系下進行齒面接觸分析(TCA)求解,得到大、小輪齒面初始接觸間距矢量w和幾何傳動誤差TEG;③采用有限元方法計算輪齒工作齒面結點柔度系數,采用二元插值法確定齒面接觸線離散點法向柔度矩陣F。
本文面齒輪傳動大、小輪齒面均采用作者在文獻[23]中所述的碟形砂輪磨齒展成,獲得齒面(包括過渡曲面)離散點后,考慮齒輪輪緣并根據面齒輪副幾何特點編程生成節點和單元,圖1所示為生成面齒輪有限元模型。

圖1 面齒輪有限元模型


圖2 嚙合坐標系
(1)
式中:R1f、n1f為小輪位矢和法矢,u1、l1是展成小輪齒面的獨立參數;R2f、n2f為面齒輪位矢和法矢,u2、l2是展成面齒輪齒面的獨立參數。
上式可分解得含6個參數5個獨立的標量方程,以一定增量ΔΦ2=2π/(z2N) (N為嚙合周期等分數)改變Φ2值輸入即可求解得到嚙合跡線,并根據下式求解幾何傳動誤差
ΔΦ2=Φ2-Φ20-z1/z2(Φ1-Φ10)
(2)
式中:Φ10、Φ20是兩齒面初始轉角,z1、z2是兩輪齒數。
不考慮輪齒嚙合時的潤滑油和摩擦力作用,則在總法向嚙合力P作用下,面齒輪傳動承載接觸分析的模型如圖3所示。面齒輪傳動為準共軛點接觸齒面,在載荷作用下輪齒將產生彈性變形,不計瞬時接觸區寬度,認為點接觸將擴展為沿瞬時接觸橢圓長軸發生的線接觸。圖中表示的即為齒面過瞬時接觸橢圓長軸的法截面,假設有齒對I和齒對II可能同時接觸,接觸橢圓中心為i點,而j點為接觸橢圓長軸上的任意離散點(2對齒間共n個離散點),則變形后位移協調方程為

圖3 面齒輪傳動承載接觸模型
Fkpk+wk=dk+Zk(k=I,II)
(3)
式中:pk=[p1,p2, …,pn]T為瞬時接觸橢圓長軸離散點處法向載荷;dk=[d1,d2, …,dn]T為瞬時接觸橢圓長軸離散點處變形后的齒面間隙;Zk=Z[1, 1, …, 1]T為輪齒變形后的法向位移。
各離散點法向載荷pj(j=1, 2, …,n)須滿足力平衡條件
(4)
輪齒接觸時非嵌入條件為
(5)
根據前述內容,綜合考慮了齒面修形、變位、小輪偏置以及安裝誤差等因素的面齒輪傳動承載接觸問題的數學規劃表示如下
(6)
上述非線性規劃目標為變形能最小,Xj(j=1, 2,…,n+1)為人工變量;X=[X1,X2, …,Xn]T,n維列向量;e為單位n維列向量;pj≥0、dj≥0、δj≥0、Xj≥0為接觸邊界條件。用改進的正規形法[24]求解上式,由此獲得未知參數d、Z、p,并下式計算齒對I和II在某任意瞬時嚙合位置的載荷分配系數
(7)
齒輪傳動誤差的定義為“主動輪轉過一定角度,從動輪實際轉動位移與理想轉動位移之差”[25],故可將面齒輪輪齒變形后的法向位移按下式轉換為承載傳動誤差
(8)
式中:ω2為面齒輪角速度矢量。
圖4所示為按上述方法獲得的典型面齒輪傳動修形后的幾何傳動誤差TEG和承載傳動誤差TEL曲線,幾何傳動誤差曲線上的點a和a′為單齒嚙合與雙齒嚙合的臨界轉換點,距離aa′ 即為一個嚙合周期T,幾何傳動誤差曲線下端開口距離cc′ 與嚙合周期T之比即為面齒輪傳動的有效重合度。承載后的實際重合度由幾何傳動誤差曲線和承載傳動誤差曲線的交點b和b′確定,等于距離bb′ 與嚙合周期T之比,點b和b′即為嚙入和嚙出點。無載時實際重合度為1,即幾何傳動誤差曲線應為連續的實線部分。在某任意瞬時嚙合位置,承載后的輪齒法向綜合變形量δ取決于TEG-TEL的大小,兩者按下式轉換
(9)
單齒副嚙合剛度是指只考慮一對主動輪齒和被動輪齒從進入嚙合到退出嚙合的剛度,綜合嚙合剛度是指整個嚙合周期內所有參與嚙合的多對輪齒嚙合剛度疊加后的綜合效應。設單對輪齒在嚙合周期T內共有8個嚙合位置,從進入嚙合到退出嚙合共有N個嚙合位置,則面齒輪傳動綜合嚙合剛度和單齒副嚙合剛度分別由式(10)和式(11)計算
(10)
ks(jj)=km(jj-8floor(jj-1)/8))Lk(jj)(jj=1,2,3,…,N)
(11)
根據上述內容,將面齒輪傳動嚙合剛度求解程序化,流程見圖5,整個過程求解耗時僅約5 min。

圖5 嚙合剛度求解流程
2 計算精度驗證
目前,由于面齒輪傳動嚙合剛度尚未有比較權威的計算方法和公式,而漸開線圓柱齒輪的嚙合剛度計算方法已較成熟,并有不少文獻給出了相關的計算方法和公式。為驗證本文所提出基于LTCA的嚙合剛度計算方法的可行性和精確性,現采用本文方法和現有文獻方法分別對斜齒輪傳動的綜合嚙合剛度進行計算。Maatar等[26]基于齒輪副瞬時接觸線長度,推導出簡單實用的斜齒輪綜合嚙合剛度解析式,并得到了較廣泛應用,具體公式如下
(12)
式中:k0,Lk,Ak,Bk,τ具體含義見文獻。
斜齒輪傳動基本幾何參數:大、小輪齒數為41、40,法向壓力角為20°,分度圓螺旋角為14°27′24″,法向模數為4 mm,齒頂高系數為1,頂隙系數為0.25,齒寬為30 mm。齒輪材料彈性模量為206 GPa,泊松比為0.29,負載為10 000 N·m。上述2種方法計算結果見圖6,可見2種方法計算所得綜合嚙合剛度曲線變化規律比較吻合,但因式(12)未考慮齒輪齒根過渡曲面和輪緣變形對嚙合點影響,導致其結果偏大,但最大偏差為8.92%,平均偏差僅為5.83%,故采用本文方法分析面齒輪傳動嚙合剛度可以保證較高精度。

圖6 綜合嚙合剛度比較
3 面齒輪傳動嚙合剛度分析
某偏置變位面齒輪傳動仿真參數如下:面齒輪產形輪齒數為31,面齒輪齒數為140,面齒輪內徑、外徑分別為425 mm、465 mm,直齒圓柱小輪齒數為28,模數為6.35 mm,壓力角為25°,變位系數為-0.2,小輪偏置距為50 mm,輪緣系數為2.5,軸夾角γ為90°,小輪齒條刀和面齒輪產形輪的刀頂圓弧半徑均為0.635 mm。面齒輪傳動的材料參數與前述斜齒輪傳動相同。
圖7、圖8、圖9分別負載為1 000 N·m時的法向變形量、嚙合剛度、單對輪齒從進入嚙合到退出嚙合過程中法向嚙合力的變化曲線。由圖可知,面齒輪傳動綜合嚙合剛度和法向變形量的波動表現出較明顯的階躍突變,這是因為該變位偏置面齒輪傳動重合度約為1.5,嚙合過程存在“雙齒—單齒—雙齒”交替變化,在雙齒嚙合區,整個載荷是由兩對輪齒共同承擔的,故此時齒輪的法向變形量較小,而綜合嚙合剛度較大,反之,在單齒嚙合區,整個載荷僅由一對輪齒承擔,故此時齒輪的法向變形量較大,而綜合嚙合剛度較小。小輪轉角在-8.035°時齒輪副開始進入嚙合,隨著轉角增大,作用在該對輪齒上的法向嚙合力逐漸增大,單齒副嚙合剛度也逐漸增大;當小輪轉角在0°~3.21°時,此時為單齒嚙合區,載荷全部作用在該對輪齒上,其法向嚙合力達到最大并保持不變,但此區間法向變形量略微增加,故單齒副嚙合剛度略微減小;隨即下對輪齒進入嚙合,該對輪齒上的法向嚙合力突變減小,對應的單齒副嚙合剛度也以較大幅度減小,之后,該對輪齒上的法向嚙合力和單齒副嚙合剛度均逐漸減小,直至該對輪齒退出嚙合。

圖7 法向變形量

圖8 嚙合剛度

圖9 法向嚙合力
為分析負載PL、變位系數x、小輪偏置距E和3類安裝誤差(軸向位移誤差Δq、偏置誤差ΔE、軸夾角誤差Δγ)對面齒輪傳動嚙合剛度均值和波動幅值的影響,分別以各單一影響因素作為變量計算面齒輪傳動綜合嚙合剛度,計算結果見圖10~圖13。
由圖可見,綜合嚙合剛度波動幅值對載荷、變位、小輪偏置和安裝誤差均不敏感,但綜合嚙合剛度均值受載荷、小輪偏置和安裝誤差影響較大。綜合嚙合剛度均值隨載荷增大而增大,隨偏置距增大而減小,而幾乎不受變位影響。在3類安裝誤差中,軸夾角誤差對綜合嚙合剛度均值影響最大,而偏置誤差對綜合嚙合剛度均值影響較小,故面齒輪實際安裝時要嚴格控制軸夾角誤差。

x=0, E=0, Δq=0, ΔE=0, Δγ=0°

PL=1 000 N·m, E=0, Δq=0, ΔE=0, Δγ=0°

PL=1 000 N·m, x=0, Δq=0, ΔE=0, Δγ=0°
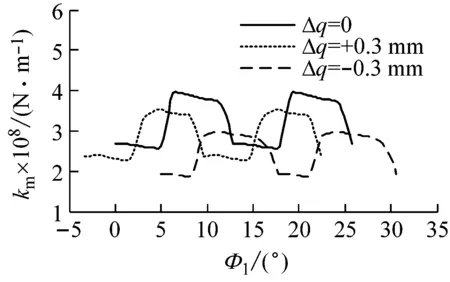
(a) PL=1 000 N·m, x=0, E=0, ΔE=0, Δγ=0°

(b) PL=1 000 N·m, x=0, E=0, Δq=0, Δγ=0°

(c) PL=1 000 N·m, x=0, E=0, Δq=0, ΔE=0
4 面齒輪傳動修形減振優化
4.1 優化模型
齒輪副的綜合嚙合剛度變化是產生振動與噪聲的主要原因之一,綜合嚙合剛度變化波動幅值越大,振動越大,噪聲越大,變化幅值小則傳動平穩[27-28]。齒輪修形技術是齒輪傳動減振降噪的重要手段[29],而修形參數選的是否合理,直接決定著能否有效提高承載能力和傳動平穩性。通常,面齒輪副大、小輪均可進行修形,但面齒輪齒面復雜、修形難度大,效率低,而小輪齒數少、加工方便,效率高,故在小輪上進行修形更有優勢。作者在文獻[30]中設計了由2段拋物線與1段直線組成的小輪齒廓、齒向修形曲線,見圖14,且修形后嚙合性能改善明顯。圖中l1、l3為齒廓修根時修形量、修形長度,l2、l4為齒廓修緣時修形量、修形長度,l5、l7為齒向兩端修形量,l6為齒向不修形長度,h、b為旋轉投影面上的齒高、齒長。

(a) 齒廊方向

(b) 齒向方向
以上述7個修形參數為優化變量,以綜合嚙合剛度波動幅值最小為目標,則面齒輪傳動修形減振優化模型可簡化如下。
優化變量:l1、l2、l3、l4、l5、l6、l7;

根據前述齒輪參數和拓撲修形工藝要求,優化變量取值范圍見表1。
4.2 優化算法
本文優化過程是通過不斷改變小輪的修形參數,來改變齒面接觸狀況的迭代過程,屬高度非線性接觸問題。優化變量與目標函數之間無直接關聯,無法建立兩者的解析表達式,現采用帶有精英策略的快速非支配排序遺傳算法(NSGA-Ⅱ)求解上述優化模型,流程見圖15。NSGA-II算法參數[31]取值如下:交叉、變異概率取0.9、0.1,為節省時間,終止進化代數gmax=50,種群規模取20。


圖15 NSGA-Ⅱ算法修形減振優化流程
4.3 優化結果與討論
圖16所示為未修形面齒輪傳動和修形減振優化后面齒輪傳動對應的綜合嚙合剛度,優化獲得的變量取值如下:l1為0.015 mm、l2為5.660 mm、l3為0.010 mm、l4為5.315 mm、l5為0.017 mm、l6為22.506 mm、l7為0.018 mm。由圖可見,優化后齒面拓撲修形雖使綜合嚙合剛度的均值稍有減小,但綜合嚙合剛度的波動幅值大幅下降,由1.391×108N/m降為0.124×108N/m,減小了91%,故優化修形參數可有效減小面齒輪傳動的振動和噪聲。

PL=0, x=0, E=0, Δq=0, ΔE=0, Δγ=0
5 結 論
(1) 綜合考慮變位、小輪偏置、齒面修形以及安裝誤差,提出了基于LTCA技術的面齒輪傳動嚙合剛度計算方法,并將斜齒圓柱齒輪傳動的嚙合剛度計算結果與文獻對比,驗證了本文方法的精確性。
(2) 對某變位偏置面齒輪傳動的分析表明,面齒輪傳動的法向變形、嚙合剛度和法向嚙合力隨嚙合位置變化,且波動幅值較大,存在階躍突變現象。
(3) 載荷、變位、小輪偏置和安裝誤差對面齒輪傳動綜合嚙合剛度均值和波動幅值的影響分析表明,綜合嚙合剛度波動幅值對載荷、變位、小輪偏置和安裝誤差并不敏感,但綜合嚙合剛度均值受載荷、小輪偏置和安裝誤差影響較大;在3類安裝誤差中,軸夾角誤差對綜合嚙合剛度均值影響最大,故面齒輪實際安裝時要嚴格控制軸夾角誤差。
(4) 優化小輪修形參數后使綜合嚙合剛度的波動幅值大幅下降,從而可有效減小面齒輪傳動的振動和噪聲。