耙吸挖泥船波浪補償聯合仿真方法
2019-03-26 08:56:00冒小丹施紹剛周忠瑋樹偉
中國港灣建設 2019年3期
關鍵詞:模型
冒小丹,施紹剛,周忠瑋,樹偉
(中交疏浚技術裝備國家工程研究中心有限公司,上海 201208)
0 引言
耙吸挖泥船[1-3]是一種大型自航、裝艙式挖泥船,裝備有耙頭挖掘機具和水力吸泥裝置,在航道和港口疏浚施工中起到重要作用。耙吸挖泥船施工過程中,由于受到海浪作用,會產生復雜的運動狀態(如橫搖、縱搖和垂蕩運動等),同時造成耙頭位置的頻繁運動。為了減輕波浪起伏對施工的影響,每艘挖泥船上都會配置相應的波浪補償系統。目前國內的大型耙吸挖泥船,較為常見的是采用恒張力補償方案[4]的被動式波浪補償器。
近年來,利用計算機仿真軟件對耙吸挖泥船多體運動學和波浪補償器液壓系統動態特性進行的研究很多,但是很少將二者結合起來進行分析。現有的液壓仿真系統已能夠較好地對液壓控制系統進行還原,不過在系統運動學和動力學方面的分析能力尚欠缺,在研究問題時無法準確地將機械和液壓系統有機地結合起來,使得仿真效果存在一定偏差。計算機聯合仿真接口的快速發展為相關研究創造了可能性,相關學者也利用聯合仿真模型做了一些研究。黃周軒[5]等基于AMESim和ADAMS軟件的聯合仿真模型,分析了不同工況下液壓盤式剎車的動態響應特性,仿真與以往采用的單一模型相比更接近實際工況。皮明[6]等利用ADAMS和EASY5軟件進行聯合仿真,實現了機械臂運動軌跡的液壓控制仿真。姚曉光[7]等將Pro/E建立的模型通過Mechan ism/Pro接口程序導入ADAMS中進行優化設計,提供了一種模型改進的方法。姚莉君[8]等應用ADAMS對3自由度的并聯機構進行了建模,結合Simulink軟件聯合仿真,解決了以往機械與控制系統不匹配的問題。董東雙[9]等基于AMESim和MATLAB聯合仿真的方法,分析了液壓變壓器的工作特性。
本文以某大型自航式耙吸挖泥船為研究對象,利用ADAMS軟件建立其在外部載荷作用下的虛擬樣機模型,實現在計算機上仿真分析其復雜機械系統的運動學和動力學性能;然后運用液壓軟件建立其波浪補償控制系統的液壓仿真模型,通過仿真接口完成這兩個軟件的交互計算,形成機液一體化的聯合仿真技術,以提高仿真建模的效率,使仿真結果更加貼近真實情況;最后利用多個波浪工況下的仿真結果來分析波浪補償系統的補償效果,以驗證本文提出的聯合仿真方法的可行性。
1 波浪補償系統原理及動力學分析
1.1 工作原理
以挖泥船左舷為例,本文研究的耙吸挖泥船波浪補償裝置原理如圖1所示。
液壓缸3的缸體固聯安裝于船舶的左舷,上端安裝有滑輪,鋼絲繩繞過滑輪連接挖泥船的耙臂,液壓缸的活塞桿相對于缸體的位移使得耙頭產生2倍的單位位移,同時活塞桿受到的支撐力也是繩索拉力的2倍。當耙頭處于靜止狀態時,耙頭的重力、泥土的支撐力和水的浮力的合力通過滑輪作用于活塞桿上,3個蓄能器供應的液壓油產生的液壓推力與活塞承受壓力平衡。由于蓄能器的緩沖,液罐中的壓縮空氣在體積變化不大的情況下,壓力變化也很小,這就保證了波浪補償器油缸活塞桿的推力為近似恒力。因此當水面有波浪時,船體會上下晃動,波浪補償器油缸活塞桿會相應的伸出或縮回,確保纜繩的張力近似恒定,以避免耙頭在施工過程中大幅上下運動。
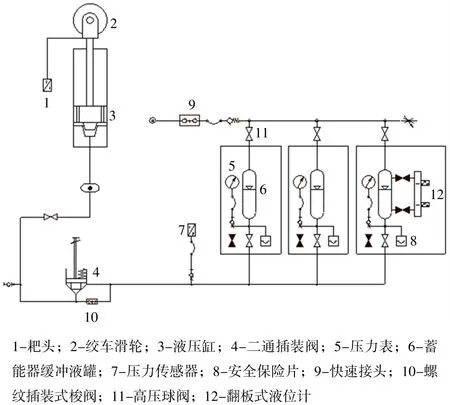
圖1 耙吸挖泥船波浪補償裝置原理示意圖Fig.1 Schematic diagram of wave compensation device for trailing suction hopper dredger
1.2 動力學分析
對下耙管(包括耙頭)單獨分析,它在垂直方向上主要受鋼絲繩的拉力、其自身的重力、浮力、水流力和泥面的支撐力作用,關系式如下:

式中:Tg為鋼絲繩的拉力;Flp為浮力;Fnp為豎向水流力;FL為泥面支撐力;Gp為下耙管(包括耙頭)重力;Mp為下耙管(包括耙頭)質量。
對于活塞桿,主要受蓄能器提供的被動補償力,活塞桿重力,鋼絲繩作用于活塞桿壓力和液壓缸內壁的摩擦力作用,受力關系式如下:

式中:Fm為被動補償力;Ftg為鋼絲繩作用于活塞桿的壓力;Mh為活塞桿質量;g為重力加速度;fh為摩擦力;Bh為液壓油黏性系數。
耙頭、船體及活塞桿的位移關系式如下:

式中:zp為耙頭的補償后位移;zs為船體重心的垂向位移;zh為活塞桿的絕對位移;zh′為活塞桿的相對位移。
對于蓄能器提供給活塞的被動補償力[10],可以運用泰勒展開方法獲得蓄能器的線性化模型:

式中,λ的表達式為:

式中:p0為蓄能器的初始壓力;V0為蓄能器內的初始體積;A為活塞桿的有效接觸面積。
2 耙吸挖泥船多體動力學仿真建模
運用ADAMS多體建模時需要大量參數,用來搭建挖泥船動力學仿真模型。參數主要涵蓋船體、耙等部件,還有船舶受到的外部載荷力,如水流力、波浪力等。雖然ADAMS運動學及動力學分析能力較強,但是無法建立復雜的三維模型。本文首先運用三維建模軟件建立耙吸挖泥船的3D模型;然后將igs格式的模型導入ADAMS中;再根據耙吸挖泥船的尺度參數,完成基本的單位和重力設置。耙吸挖泥船虛擬樣機模型(包括船體和耙管)的材料設置為鋼,密度為7 850 kg/m3,耙管內泥水混合物密度為1 200 kg/m3。
耙吸挖泥船和耙臂受到重力及外部載荷作用力,如浮力、水流力等,力或者力矩作用的位置點在其質心位置,船舶所受波浪力經AQWA軟件計算后,由船舶垂蕩運動等效代替。為了實現船舶的垂蕩運動,在挖泥船的樣機與外部空間(ground)之間建立滑移副,再定義運動(motion)并代入船舶重心在垂直方向上的運動數據(船舶垂蕩數據由AQWA計算所得),最終經二維曲線插值獲得耙吸挖泥船的位移-時間曲線,由此還原耙吸挖泥船在波浪作用下的運動過程。耙臂與船底基線的夾角為30°,耙臂從船體連接處到耙頭分為3部分,左右耙管關于xoz面對稱,船體與彎管之間采用固定約束,彎頭與耙臂第1段,耙臂第1段與第2段之間設置轉動鉸約束,方向繞y軸。
耙頭和底部泥面之間設置接觸CONTACT,接觸剛度值由實際施工土質決定,本文以中粗砂為研究對象,硬度設置為1 000 N/m。采用ADAMS/Cable模塊創建滑輪及繩索系統,實現船體和上耙管之間的連接,同時在繩索與上耙管的連接點上設置固定副。船舶及耙管主要受自身重力、浮力、水流力、繩索拉力和泥面接觸力作用,外部載荷力使用sforce(單方向力)或者vforce(多方向力)方式建立,作用點在質心位置。從液壓軟件反饋過來的繩索拉力預先使用sforce建立,作用點位于下耙管的質心位置(模擬繩索),作用力函數Function預設為0,后期聯合仿真階段可由數組傳遞過來。最終建立完成的耙吸挖泥船虛擬樣機如圖2所示。
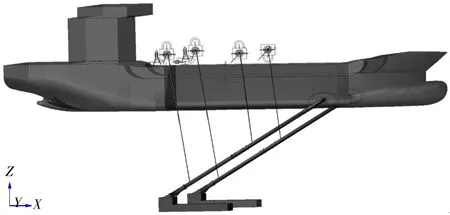
圖2 耙吸挖泥船多體動力學虛擬樣機模型Fig.2 Multi-body dynamics virtual prototype model of trailing suction hopper dredger
3 波浪補償液壓系統仿真
根據前文提出的波浪補償器工作原理,利用液壓軟件建立仿真模型(包括聯合仿真接口),經簡化后如圖3所示。搭建的系統模型包括補償液壓缸、轉動滑輪組、氣囊式蓄能器、力傳感器和液壓管路等。為了實現ADAMS和液壓軟件之間的聯合仿真,在液壓仿真模型中加入ADAMS接口控件(圖中圓矩形實線框區域),velocity1和displacement1代表從ADAMS輸入的速度和位移信號,而force1則是液壓軟件反饋回來的鋼絲繩拉力信號。
根據實際施工土質,設定波浪補償器蓄能器壓力。在ADAMS軟件中,通過設定耙頭和泥面之間的接觸阻尼,來模擬施工土的性質。以廈門海域某項目中粗砂施工過程為例,蓄能器總輸出壓力為30 bar左右。在本次仿真中單個蓄能器的工作壓力設定為30 bar,預充壓力為21 bar,蓄能器容積為1 400 L,節流孔直徑為150 mm。液壓缸活塞桿的行程極限為3 m,質量為1 kg,直徑為400 mm。
對ADAMS和液壓軟件作聯合仿真時,設定單位必須一致,這里長度選用mm,力為N,質量為kg,時間為s,角度為(°),頻率為Hz。由于在聯合仿真0時刻,鋼絲繩中沒有位移和速度,因此為了保證活塞桿初始受力平衡,鋼絲繩需要設定初始拉力,拉力大小為蓄能器總輸油壓力的一半。
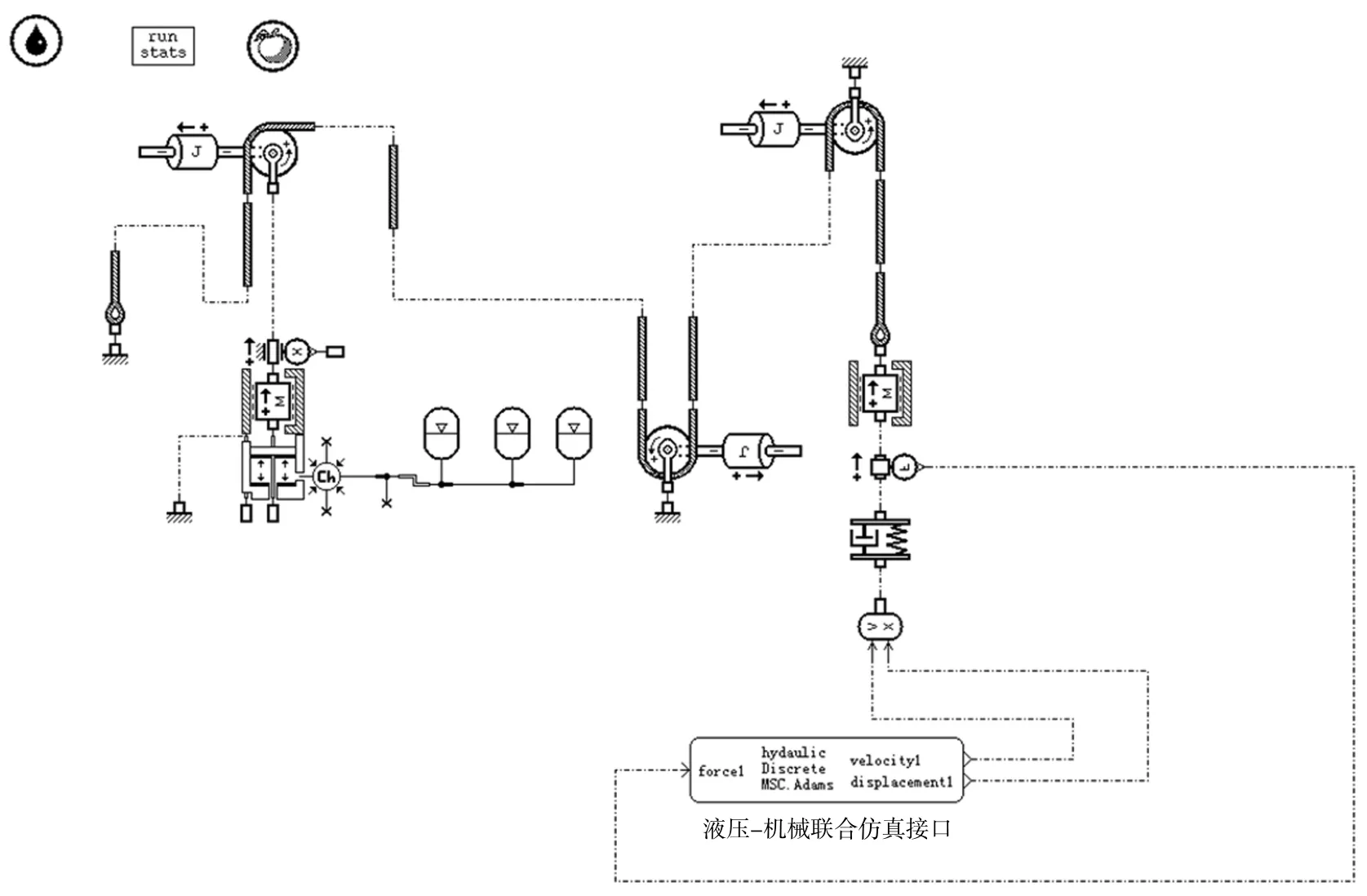
圖3 液壓仿真模型Fig.3 Hydraulic simulation model
4 聯合仿真原理
運用ADAMS建立耙吸挖泥船在外部載荷力作用下的虛擬樣機機械模型,其中液壓軟件搭建系統的液壓和控制部分。目前常用的聯合仿真方式有ADAMS主控和液壓主控兩種,本文采用ADAMS主控的方法。主要思路為:首先利用ADAMS計算出耙頭及船體垂蕩的絕對位移和速度,將位移和速度的合信號傳遞到液壓軟件里;然后利用液壓軟件計算出被動補償的鋼絲繩拉力;最后將鋼絲繩拉力信號反饋給ADAMS,并繼續循環計算下去。在ADAMS中耙頭和船體的合位移和速度設置為輸入變量,將反饋回來的鋼絲繩拉力作為輸出變量,通過輸入與輸出變量實現兩個軟件之間的交互。聯合仿真原理如圖4所示。
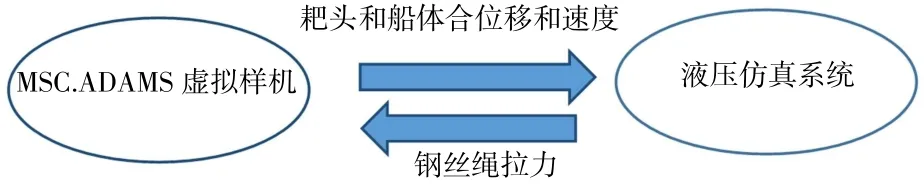
圖4ADAMS和液壓軟件聯合仿真原理圖Fig.4 Co-simulation schematic diagram of ADAMS and hydraulic software
5 計算海浪工況
本文選取5個典型計算海浪工況,運用ADAMS建立虛擬樣機仿真分析,以獲取船體運動及各部件受力情況,仿真時主要觀測船體、耙頭垂向運動,耙頭力及繩索力(聯合仿真時用液壓軟件的反饋力代替)。船身垂蕩位移作用在質心處,不考慮縱向位移。輸入的船舶垂蕩位移數據經由AQWA計算所得,選取的5個海浪工況如下:
工況1:9 s周期,1 m波高,船體重心垂向位移變化曲線如圖5所示;工況2:12 s周期,1 m波高;工況3:15 s周期,1 m波高;工況4:9 s周期,2 m波高;工況5:9 s周期,3 m波高。在以上所有工況中,挖泥船的航速均設定為1.5 kn。
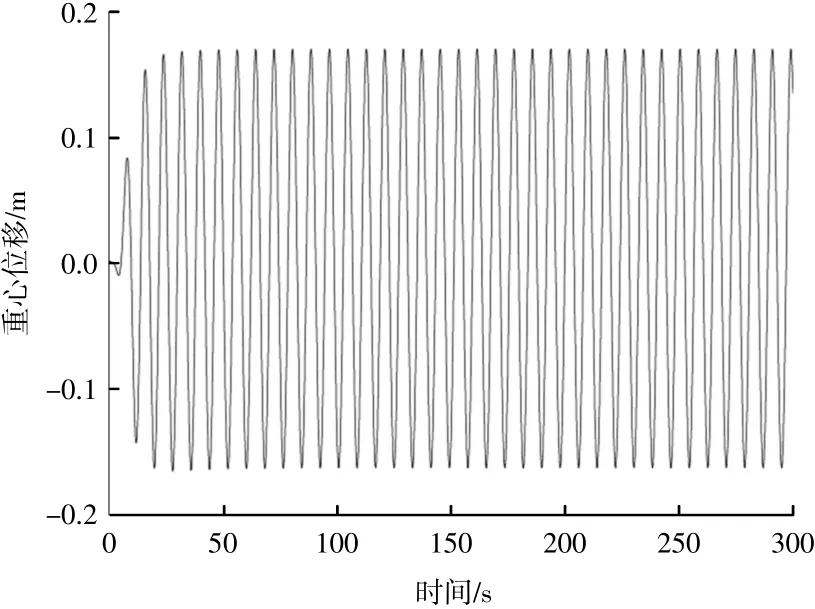
圖5 工況1船舶重心垂向位移-時間曲線Fig.5 Vertical displacement-time curve of the ship "s gravity center under working condition 1
6 結果分析
根據計算海浪工況,輸入船舶重心垂向位移數據,經二維插值獲得挖泥船樣機垂蕩運動。在ADAMS模塊中選中Discrete(離散)和Interactive(交互)方式,ADAMS計算步長和AMESim輸出步長都設置為0.1,計算時間均為300 s。以工況1為例,該工況下挖泥船重心及耙頭垂向位移-時間曲線如圖6所示。由圖6可知,耙頭經補償后的位移遠小于挖泥船的重心位移,上下運動的振幅只有5 cm,對實際施工的影響很小,滿足波浪補償的工程需求。再結合不同波高和不同波浪周期下的補償效果(如表1所示)可以看出,耙頭補償后的位移變化趨勢與挖泥船重心位移基本一致。隨著波浪周期的增長,耙頭補償后的位移也隨之增大,但是增加幅度逐漸減小;隨著波高的增加,耙頭補償后的位移線性增加。根據前文耙頭與挖泥船重心、液壓缸活塞位移之間的關系式可知,在液壓油壓力一定的條件下,耙頭的位移主要與挖泥船運動位移相關,以上仿真的結果可以驗證此結論。
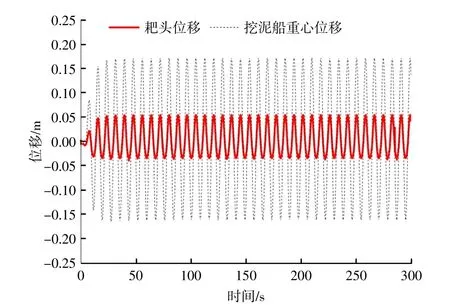
圖6 工況1挖泥船重心及耙頭垂向位移-時間曲線Fig.6 Vertical displacement-time curve of the ship "s gravity center and rake head under working condition 1
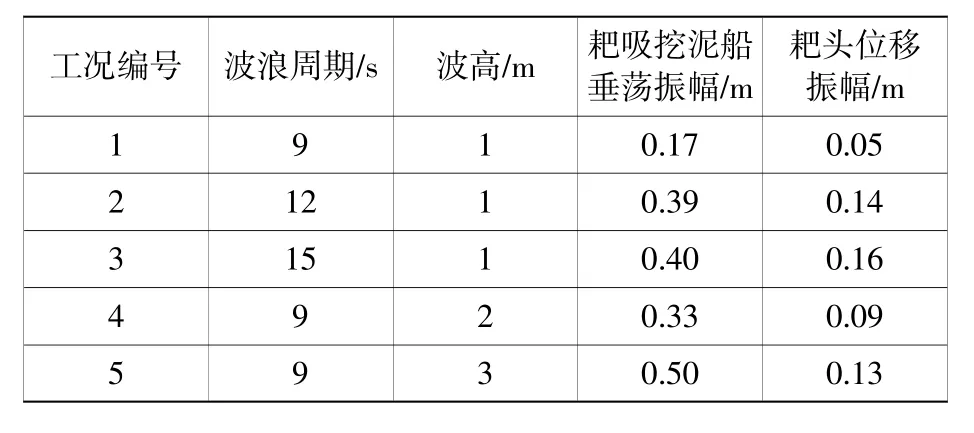
表1 不同工況下的波浪補償結果Table 1 Wave compensation results under different working conditions
表2為不同工況下的鋼絲繩拉力基本數據。由表2可知,鋼絲繩的拉力變化趨勢同挖泥船的重心位移變化基本一致,隨著波高的增加,鋼絲繩張力變化幅度增大,周期不變;隨著周期增加,鋼絲繩張力增大幅度逐漸變小。張力變化幅值為張力均值的0.18%~0.3%,變化幅度較小,說明鋼絲繩總體情況下處于張力恒定即繃緊狀態,與前文所述被動式波浪補償器的原理相吻合,說明仿真結果是合理的。
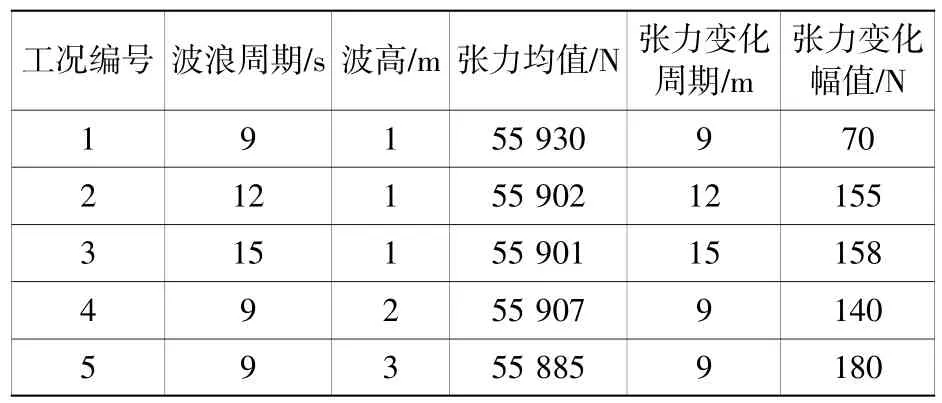
表2 不同工況下鋼絲繩張力數據Table 2 Tensile force of the wire rope under different working conditions
7 結語
1)基于液壓軟件和ADAMS的聯合仿真技術可以對耙吸挖泥船波浪補償系統進行很好地仿真模擬,能為該系統提供合適的虛擬試驗平臺。
2)耙頭經補償后的位移大幅小于挖泥船的重心位移,該耙吸挖泥船波浪補償系統的補償效果基本滿足施工要求。計算結果表明,鋼絲繩在大部分時間下處于繃緊狀態,可以有效防止因鋼絲繩收縮引起的松耙現象。
3)在液壓油壓力一定的條件下,耙頭運動主要受挖泥船運動影響,不過相對于黑箱軟件實時輸入,在工程應用中不可避免地要面臨補償反饋的時間差問題,導致耙頭位移變化相位滯后于船身,補償不及時。為了進一步提高波浪補償器的補償精度,降低時滯影響,可以考慮在模型中加入主動和PID控制模塊。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19