軌道客車多維速度檢測信息的數(shù)據(jù)融合技術(shù)
2019-03-27 09:12:40趙海波
城市軌道交通研究 2019年2期
朱 彥 趙海波
(中車長春軌道客車股份有限公司總體研發(fā)部, 130062, 長春//第一作者, 教授級高級工程師)
隨著科技的發(fā)展和乘客對軌道客車要求的提高,“安全、可靠、綠色、智能、高顏值”已經(jīng)成為軌道客車的新發(fā)展方向。軌道客車的速度信息是重要的檢測數(shù)據(jù),直接關(guān)系到列車控制系統(tǒng)和信號系統(tǒng)等多個控制系統(tǒng)的控制過程。如何獲得真實和可靠的速度信息是提升軌道客車安全性的重要保障。本文旨在研究充分應(yīng)用各種傳感器的特點,將不同檢測機理的速度信息進行數(shù)據(jù)融合,以期獲取真實可靠的軌道客車速度信息。
1 速度信息獲取方式
目前,軌道客車一般通過安裝在列車上的速度傳感器或其他速度監(jiān)測裝置來獲得各自獨立的速度信息。速度傳感器及速度監(jiān)測裝置主要包括:基于霍爾或光電效應(yīng)的軸端速度傳感器;基于多普勒效應(yīng)的多普勒雷達;基于北斗衛(wèi)星的北斗導(dǎo)航系統(tǒng);基于慣性器件的慣性導(dǎo)航系統(tǒng)。
1.1 軸端速度傳感器
軸端速度傳感器安裝于車輛軸端(見圖1)。在車輛運行時,傳感器檢測車軸的轉(zhuǎn)速并輸出脈沖信號,信號接收器計算脈沖信號數(shù)量,并結(jié)合車輛輪徑等參數(shù)計算出車輛的運行速度[1]。
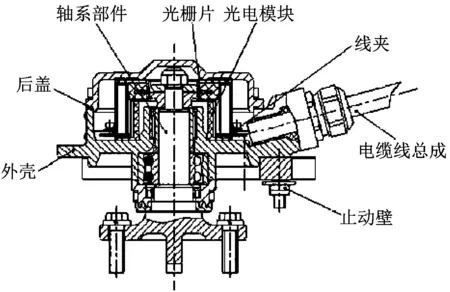
圖1 軸端速度傳感器結(jié)構(gòu)示意圖
車輛的速度計算如下:
v=3.6 πdf/n
(1)
式中:
v——軌道客車運行速度;
d——軌道客車輪徑;
f——速度傳感器輸出信號頻率;
n——車輪每轉(zhuǎn)脈沖次數(shù)。
1.2 多普勒雷達
多普勒雷達通常安裝于軌道客車車下(見圖2)[2]。在軌道客車運行時,多普勒雷達向地面發(fā)送電磁波并利用反射波與發(fā)射波的頻率差,依據(jù)多普勒頻移公式計算列車速度。

圖2 多普勒雷達結(jié)構(gòu)示意圖
車輛的速度計算如下:
v=fd/m
(2)
式中:
fd——雷達輸出頻率;
m——車輛運行每米脈沖次數(shù)。
1.3 北斗導(dǎo)航系統(tǒng)
北斗導(dǎo)航系統(tǒng)是我國自行研發(fā)的衛(wèi)星導(dǎo)航系統(tǒng),其基本原理與GPS(全球定位系統(tǒng))類似,為被動式導(dǎo)航。北斗導(dǎo)航系統(tǒng)通過接收北斗衛(wèi)星信號進行載體的定位和測速(需要接收至少4顆北斗衛(wèi)星的信號,見圖3)。目前,北斗導(dǎo)航系統(tǒng)的載波相位測試精度已經(jīng)達到了GPS的水平[3]。
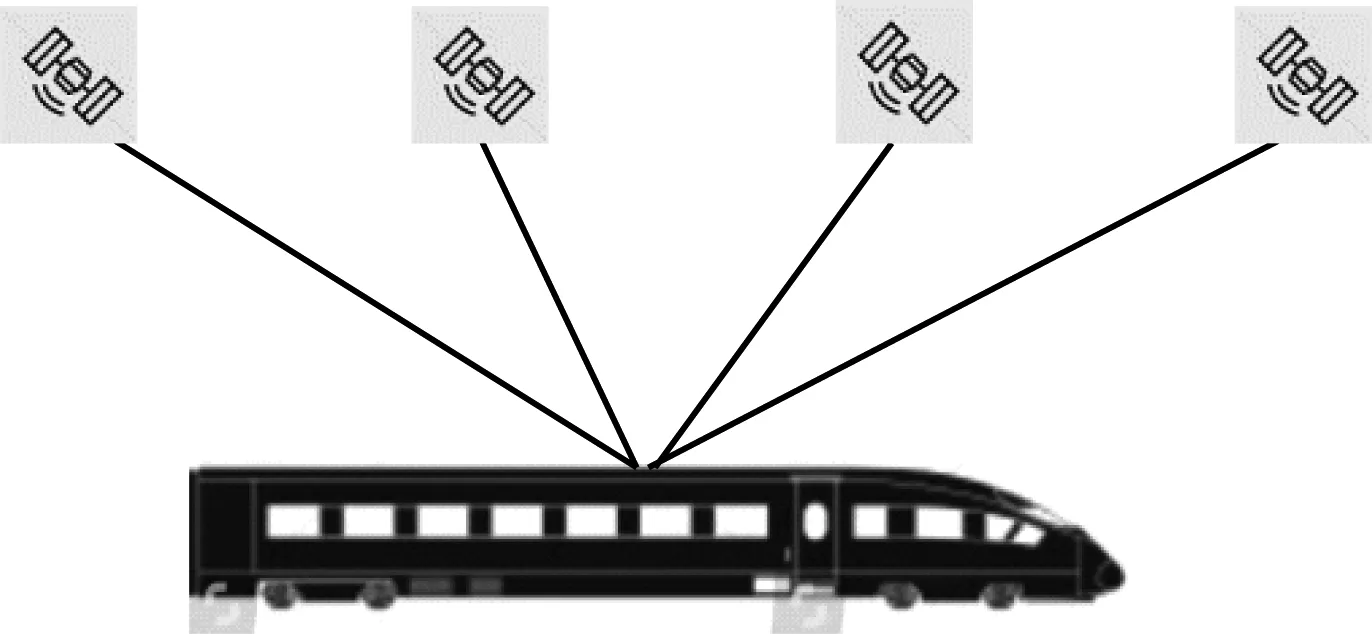
圖3 北斗導(dǎo)航系統(tǒng)列車測速示意圖
1.4 慣性導(dǎo)航系統(tǒng)
慣性導(dǎo)航系統(tǒng)(見圖4)為主動式導(dǎo)航系統(tǒng),其基本原理是利用慣性原理和加速度計實現(xiàn)對載體的速度、姿態(tài)及位置等狀態(tài)的測試,且測試信號不受外界條件的干擾。

圖4 慣性導(dǎo)航系統(tǒng)結(jié)構(gòu)示意圖
1.5 各測速裝置的測試精度分析
通過對軸端速度傳感器、多普勒雷達、北斗導(dǎo)航系統(tǒng)及慣性導(dǎo)航系統(tǒng)的原理分析,以及他們在軌道客車上的實際運用情況分析,得出的軌道客車測速裝置性能比較結(jié)果如表1所示。
通過表1可知,無論單獨使用哪種測速裝置,都無法完全滿足軌道客車對速度測試的要求。因此,有必要利用數(shù)據(jù)融合技術(shù),將多種測速裝置的測試數(shù)據(jù)進行融合處理,通過最優(yōu)狀態(tài)估計等方法,獲得正確與可靠的速度信息,從而提升軌道客車的運行安全性。
2 多維數(shù)據(jù)融合
多維數(shù)據(jù)融合是指采用不同的測速裝置對軌道客車進行速度測試,然后利用數(shù)據(jù)配準(zhǔn)、關(guān)聯(lián)及融合等技術(shù),計算獲取軌道客車速度的最優(yōu)估計信息的數(shù)據(jù)處理技術(shù)。
2.1 卡爾曼濾波
卡爾曼濾波是一種數(shù)據(jù)處理方法。凡是需要從被噪聲污染的信號中確定信號波形或狀態(tài)的,都可采用卡爾曼濾波。卡爾曼濾波的主要特點是引入了現(xiàn)代控制理論中的狀態(tài)空間概念,即將所要估計的信號作為狀態(tài),用狀態(tài)方程來描述系統(tǒng),因而能夠解決多維非平穩(wěn)隨機過程的估計問題。卡爾曼濾波算法采用遞推計算方法,不需要了解過去時刻的測量值,只需根據(jù)當(dāng)前時刻的測量值和前一時刻的估計值,即可遞推計算出所需信號當(dāng)前時刻的估計值,因此在數(shù)據(jù)融合領(lǐng)域有著廣泛應(yīng)用。
卡爾曼濾波的計算流程如圖5所示。卡爾曼濾波的基本公式表示如下:
狀態(tài)方程
Xk=Φk,k-1Xk-1+Wk-1
(1)
量測方程
Zk=HkXk+Vk
(2)
狀態(tài)預(yù)測方程
(3)
協(xié)方差預(yù)測方程
(4)
濾波增益方程
(5)
濾波估計方程
(6)
濾波協(xié)方差更新方程
Pk=(I-KkHk)Pk,k-1
(7)
濾波器初始狀態(tài)條件
(8)
式中:
k——時刻;
Xk——系統(tǒng)狀態(tài)向量;
Φk——狀態(tài)轉(zhuǎn)移矩陣;
Wk——系統(tǒng)噪聲矩陣;
Zk——狀態(tài)量測矩陣;
Hk——量測轉(zhuǎn)移矩陣;
Vk——量測噪聲矩陣;
Pk——狀態(tài)估計誤差的協(xié)方差矩陣;
Kk——卡爾曼濾波增益;
Qk——系統(tǒng)噪聲的協(xié)方差矩陣;
Rk——量測噪聲的協(xié)方差矩陣;
E——期望均值。
2.2 數(shù)據(jù)融合
選用模糊式卡爾曼濾波算法,對多維傳感器數(shù)據(jù)進行數(shù)據(jù)融合,實現(xiàn)對軌道客車速度的最優(yōu)估計(見圖6)。
在一個采樣周期t內(nèi),可將車輛的加速過程看成勻加速過程,所建立的狀態(tài)方程如下:
(9)
式中:
ak、vk、sk——分別為車輛的加速度、速度和位移的狀態(tài)值;
vax、vdo、vbd、vin——分別為軸端速度傳感器、多普勒雷達、北斗導(dǎo)航系統(tǒng)及慣性導(dǎo)航系統(tǒng)的速度輸出值;
ain——慣性導(dǎo)航系統(tǒng)的加速度輸出值。
利用式(1)~(9),可以求解出卡爾曼濾波狀態(tài)估計值,實現(xiàn)對車輛速度信息的融合。
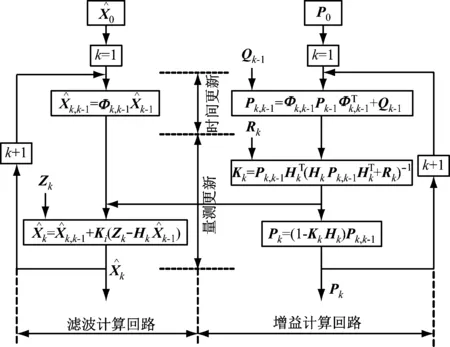
圖5 卡爾曼濾波計算流程

圖6 多維傳感器數(shù)據(jù)融合結(jié)構(gòu)
2.3 速度估計過程分析
軌道客車在正常行駛時,固定參數(shù)的卡爾曼濾波器能夠?qū)?種傳感器檢測到的速度信息進行數(shù)據(jù)融合,完成對量測噪聲的過濾,并對速度信息進行估計,輸出可靠的速度估計值。
但是,當(dāng)一種或者多種速度測量值發(fā)生波動或者突變時,固定參數(shù)的卡爾曼濾波器會發(fā)生濾波發(fā)散,速度估計值會與真實速度存在較大差異,無法滿足軌道客車運行的要求。同時,根據(jù)大量的實際運行經(jīng)驗,軌道客車在空轉(zhuǎn)/滑行往往和雨雪等惡劣天氣同時發(fā)生,因此需要采用擴展式濾波算法,在算法中根據(jù)工況的不同改變測量噪聲的值,調(diào)整速度信息和加速度信息在量測更新過程中的占比,提高對速度數(shù)據(jù)的估計精度[4-5]。速度測量值出現(xiàn)波動的工況與信號如表2所示。

表2 傳感器數(shù)據(jù)波動工況
考慮到速度測量值出現(xiàn)波動的原因是運行工況變化引起的,并不是車輛真實速度發(fā)生了突變,因此,車輛的加速度測量信息可以認為是準(zhǔn)確的,可以通過加速度信息對速度信息進行估計和過濾,調(diào)整量測值在濾波過程中的權(quán)重(見圖7)。
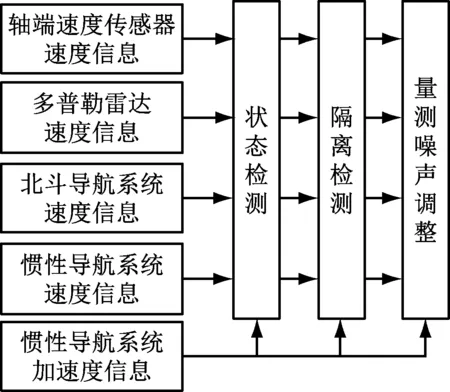
圖7 調(diào)整量測噪聲結(jié)構(gòu)圖
慣性導(dǎo)航系統(tǒng)輸出的加速度信息是由加速度計測試的,而加速度計的測量誤差是由于車輛運行過程中的振動等原因引起的(方向與列車運行方向垂直)。本文給出的加速度信息主要是在列車速度突變工況下(車輪空轉(zhuǎn)和打滑、部分速度信號丟失等)對速度進行修正,所以僅需加速度信息中與列車運行方向同向或反向的信息,故加速度的測量誤差可以不計,即可以將加速度測量值近似等同于估計值和真實值[6]。
3 仿真分析
通過計算機仿真軟件對濾波算法進行驗證。仿真分析條件設(shè)定如下:
(1) 列車運行速度:從0啟動后加速到350 km/h(誤差控制:小于±2 km/h),保持恒速運行10 min,然后實施最大的常用制動,直至列車停止。
(2) 工況:在列車恒速運行時,分別模擬列車打滑、進入隧道、遇雨或遇雪工況,每種工況持續(xù)時間為60 s;
仿真結(jié)果如圖8~11所示。通過圖中數(shù)據(jù)對比可以看出,擴展式卡爾曼濾波算法能夠有效地利用加速度數(shù)據(jù),在線調(diào)整量測噪聲的權(quán)重,充分發(fā)揮卡爾曼濾波算法的遞推式最優(yōu)估計的優(yōu)越性,達到消除噪聲干擾的目的,由此提高軌道客車測速系統(tǒng)的可靠性和穩(wěn)定性。
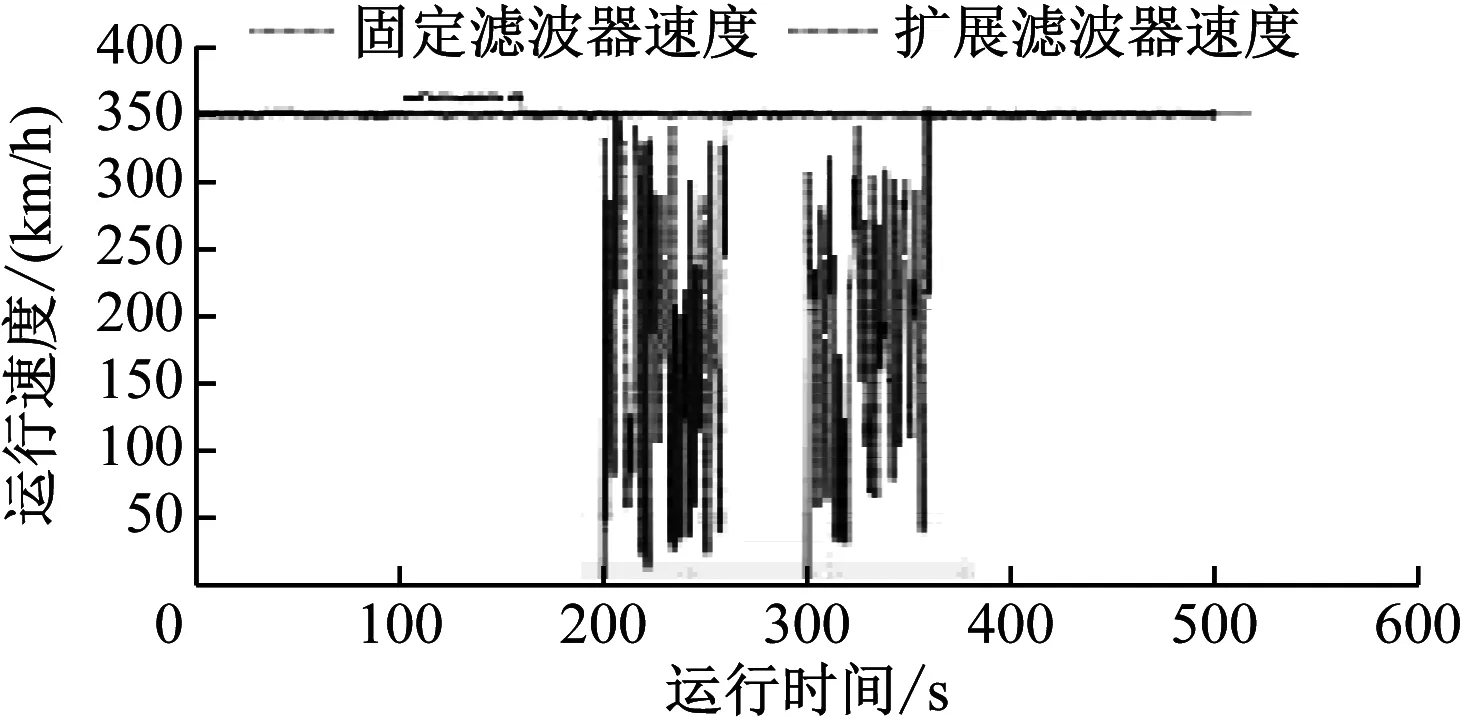
圖8 固定濾波與擴展濾波算法的速度估計值
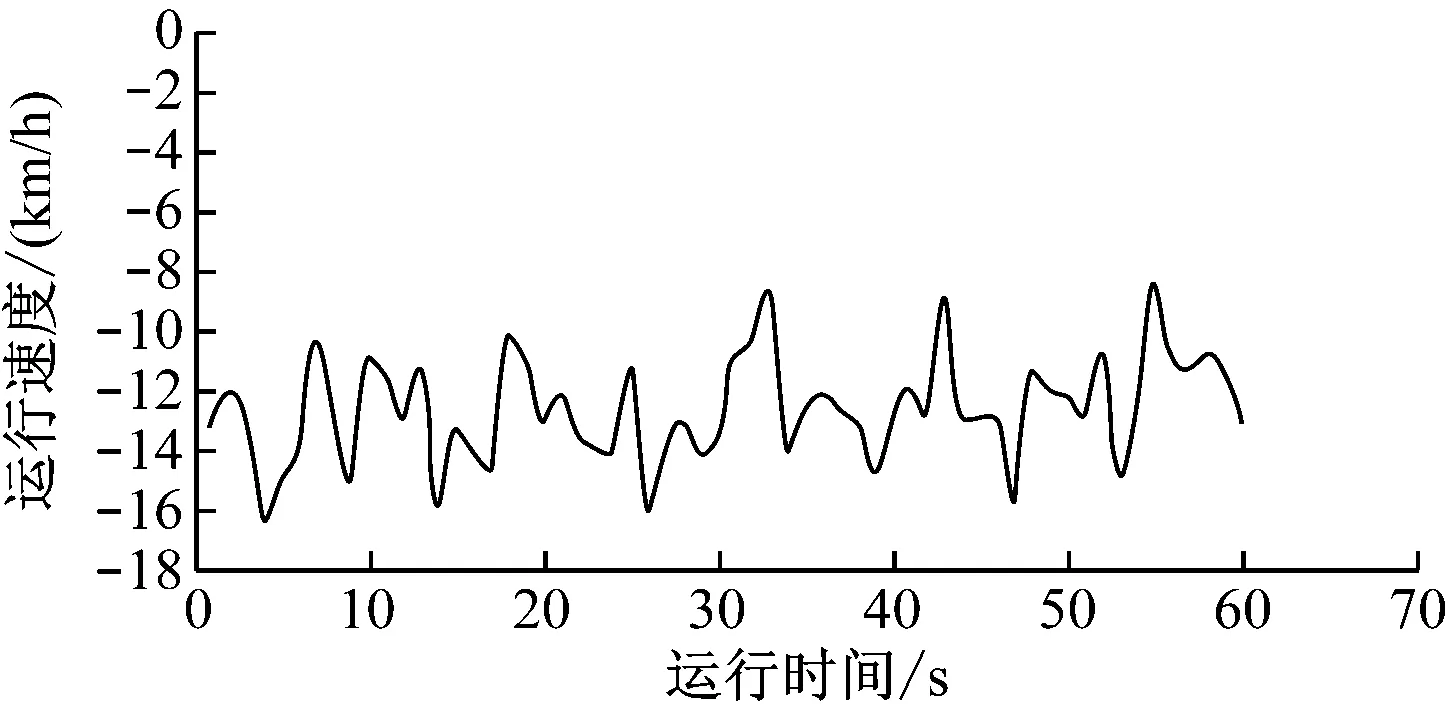
圖9 車輛打滑時兩種算法速度差
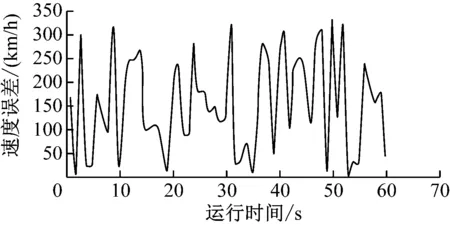
圖10 車輛進入隧道時兩種算法速度差
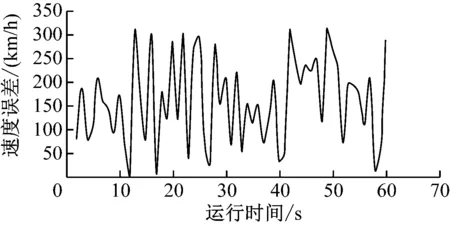
圖11 車輛在雨或雪工況時兩種算法速度差
4 結(jié)語
本文采用基于卡爾曼濾波算法的數(shù)據(jù)融合技術(shù),充分利用多種不同工作性質(zhì)的速度檢測數(shù)據(jù),在線調(diào)整算法中各參數(shù)的權(quán)重,實現(xiàn)對軌道客車速度信息的最優(yōu)估計。仿真驗證結(jié)果表明,該技術(shù)能夠得到真實可靠的軌道客車速度信息。
猜你喜歡
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設(shè)計工程(2015年13期)2015-02-27 12:06:43
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32