一種結合已有DOM和DEM的高精度自動刺像控點方法
2019-04-03 01:57:44王明明馮仲科申朝永
測繪通報 2019年3期
王明明,王 佳,馮仲科,申朝永
(1. 北京林業大學精準林業北京市重點實驗室,北京 100083; 2. 貴州省第三測繪院,貴州 貴陽 550004)
攝影測量作業過程中,為了控制加密,提高作業精度,一般須在測區內布設控制點。外業通過GPS測量等手段實地獲取控制點坐標,內業中在單張像片上標注出控制點位置,通過內外業可得到控制點在地面測量坐標系和像平面坐標系中的坐標。在地理國情普查、重點區域變化監測等方面,為了滿足現勢性需求,通過航攝更新相關地理信息產品。當已具有時相1的DOM和DEM數據時,本文提出了一種利用IPS軟件和其輔助軟件,為時相2的航攝像片刺入控制點的方法。由于IPS軟件在影像匹配階段,利用幾何自動統計方法的智能過濾器,可使匹配點提取質量最高達0.1像素[1],因此,其刺點精度遠遠優于人眼識別刺點。技術流程如圖1所示。
本文選擇的試驗區域位于貴州省安順市平壩區。時相2航攝面積約12 km2,航攝地面分辨率優于10 cm,共拍攝一個架次7條航帶156張像片,平均航高2202 m。已有此測區先期DOM和DEM,測區內最高點海拔1504 m,最低點海拔1078 m,涉及建筑物、森林、農田等多種地物。
1 軟件介紹
處理過程中涉及IPS軟件和自主編寫的IPS控制點自動采集輔助程序。
1.1 IPS軟件系統
IPS是ICAROS公司推出的快速精確處理航空影像的軟件系統,可用于各種大規模制圖和工程應用中,包括災害監測、農業和林業分析、管道制圖和能源審計等。IPS自動化程度高,從采集到完成所需時間快,操作干預和錯誤少,支持各種廣泛任務要求、傳感器有效載荷和處理條件。
1.2 IPS控制點自動采集輔助程序
為了輔助IPS軟件完成高精度自動刺像控點工作,基于Microsoft Visual Studio 2010開發平臺,采用C#語言,開發了IPS控制點自動采集輔助程序。該程序主要包括4部分:①裁切已有DOM;②生成DOM中心點坐標;③生成相機文件;④根據像點讀取控制點坐標。如圖2所示。
2 基礎數據準備
2.1 DOM裁切
已有時相1的DOM和DEM數據,如圖3所示。在ArcGIS中讀取DOM左下角和右上角點位坐標,根據時相2航攝單張像片覆蓋實地面積分析DOM裁切尺寸,以裁切后DOM覆蓋范圍略大于單張像片覆蓋范圍為宜。如圖4所示,虛線表示待裁切DOM邊界,L(XL,YL)和R(XR,YR)分別表示DOM左下角點和右上角點,a和b表示在橫向和縱向裁切DOM的長度。為了將DOM規則裁切,生成如圖4實線表示的格網,先計算格網左下角的起始點QS坐標(XQS,YQS),之后再計算完全覆蓋DOM所需要格網的列數CN和行數RN,生成裁切依據文件。
試驗數據中,可讀取到(XL,YL)=(613 725,2 924 051),(XR,YR)=(618 200,2 929 458)。航飛單張像片表示地面范圍約為0.8 km2,為了使裁切后的DOM與像片能精確匹配,此次DOM裁切規則為1500 m×1500 m,即a=1500 m,b=1500 m。下面結合試驗數據,說明裁切依據文件生成過程。
(1) 根據a和b的位數,將(XL,YL)對應數位的數字全部換為0,得到QS0(XQS0,YQS0),如本文(XQS0,YQS0)=(610 000,2 920 000)。
(2) 在(XQS0,YQS0)上分別加a和b的倍數,直至得到不大于(XL,YL)的最大值,將其賦給(XQS,YQS)。此處采用循環實現:
for (XQS=XQS0;XQS<=XL;XQS=XQS+a)
XQS=XQS-a;
for (YQS=YQS0;YQS<=YL;YQS=YQS+b)
YQS=YQS-b;
得到(XQS,YQS)=(613 000,2 923 000)。
(3) DOM右上角的坐標與起始點坐標作差,除以橫向和縱向的裁切長度,之后取整再加一。根據式
(1)
可計算出裁切格網的列數CN=4,行數RN=5。
基于以上方法,IPS控制點自動采集輔助程序可生成裁切DOM所需要的TXT依據文件,此文件內容是以影像名、左下角X坐標、左下角Y坐標、右上角X坐標、右上角Y坐標的順序表示一個圖形。如613.000-2 923.000 613 000 2 923 000 614 500 2 924 500,表示影像名為613.000-2 923.000的DOM其左下角坐標為(613 000,2 923 000),右上角坐標為(614 500,2 924 500)。之后利用裁切依據文件在Inpho中的OrthoVista模塊中裁切DOM影像,得到裁切后的DOM及其對應的TFW頭文件。
2.2 DOM虛擬POS生成
裁切后的DOM以影像的形式加載到IPS中作匹配處理,故需要POS數據和相機文件,POS數據一般格式為(影像名,X,Y,Z,Omega,Phi,Kappa)。DOM完成裁切后,小幅DOM以影像左下角坐標X-Y方式命名。DOM的虛擬POS生成過程中,X、Y坐標選擇裁切后DOM的中心點坐標,Z坐標選擇時相2航飛高度。已有DOM是標準正射影像,因此其翻滾角(Omega)、俯仰角(Phi)、航向角(Kappa)均為零。
從上文中可知裁切后DOM的左下角坐標(X左,Y左)和右上角坐標(X右,Y右),可得到DOM中心點坐標
(2)
以DOM613.000-2 923.000為例,則可知其POS為(613.000-2 923.000,613 750,2 923 750,2202,0,0,0)。同樣可得到其他裁切后DOM的POS數據。
2.3 DOM虛擬相機生成
為了與時相2像片有更為相似的匹配條件,根據時相2相機文件生成DOM虛擬相機文件。在IPS輔助軟件中,生成DOM虛擬相機文件需要輸入焦距f、相對航高H、正射影像長度a′和寬度b′(像素表示)、正射影像實地長度a、寬度b等參數。以上參數中,焦距參考時相2相機文件;相對航高根據平均航高和測區平均海拔作差得到;a、b已知,a′、b′可從裁切后DOM文件的屬性中得到。根據以上參數,結合式(3)可先求得DOM地面采樣間隔GSD,再根據式(4)求得像元大小μ。試驗數據采集使用的是飛思P65+相機,其參數見表1。
(3)
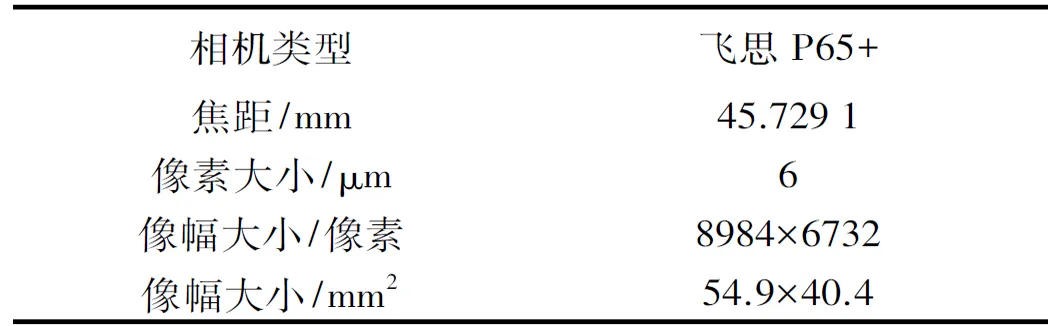
表1 飛思P65+相機參數
裁切后DOM中,a=b=1500 m,a′=b′=15 000,則根據式(3)可得GSD=0.1 m,參考表1中的焦距f=45.729 1 mm,DOM像元大小μ=0.005 431 mm。總結得出DOM虛擬相機參數見表2。
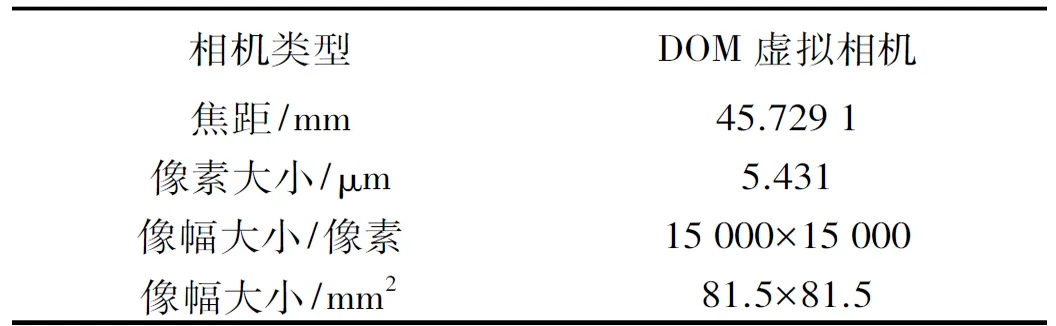
表2 DOM虛擬相機參數
3 自動刺入控制點
3.1 影像匹配
基礎數據準備完成后,在IPS軟件中建立工程。將裁切后的時相1 DOM與時相2像片均視為影像文件,在工程中加載影像文件、相機文件、POS數據、測區最高點和最低點海拔等。在相機文件夾下,存放兩個相機文件,一個是時相2拍攝相機文件,另一個是裁切后DOM的虛擬相機文件,建成工程后,修改DOM對應的相機文件為其虛擬相機文件。進入GeoViewer視圖窗口,以DOM和像片所覆蓋范圍有重疊即有關系為準,手動添加DOM與像片之間的連接關系,完成連接關系的添加,如圖5所示。
之后在Match模塊中開始同名點匹配,完成后所有匹配點均列在主窗口的Points列表中。這些點既有時相1 DOM與時相2像片之間的同名點,也有僅存在于時相2像片之間的同名點。完成匹配后,在工程中的DP文件夾下有后綴為GPF和IPF的兩個文件,其中GPF為地面點文件,IPB為像點二進制文件,通過“Tools-Bin to Directory”可將IPB文件轉換為IPF文件。GPF文件中記錄了所有匹配點在物方坐標系中的坐標,每張影像(裁切后的DOM和時相2像片)都有對應的IPF文件,記載了與此影像有關的所有同名點個數、點名及各點在此像片平面坐標系中的坐標。
3.2 制作控制點
對于同時在DOM和時相2像片上的匹配點p,圖6反映了其在DOM像方平面坐標系與物方平面坐標系中的位置。根據IPF文件可知其在DOM像平面坐標系中的坐標(xp,yp),在上文中,OrthoVista軟件在完成裁切后,會自動生成對應文件的TFW頭文件。TFW中存儲了影像在X方向和Y方向的地面采樣間隔GSD、旋轉系數,以及影像左上角柵格的中心點位(X0,Y0)。由式(5)可得DOM物方平面坐標系中心坐標(Xc,Yc)
(5)
由點p的像方平面坐標、DOM物方平面坐標中心點,以及采樣間隔GSD,可求出p點在物方平面坐標系中的坐標
(6)
根據以上原理,在IPS輔助軟件的根據像點讀取控制點坐標模塊中,輸入GPF文件、IPF文件和TFW文件等,計算所有DOM與時相2像片匹配出的點的物方平面坐標(X,Y),根據物方平面坐標和DEM可提出Z坐標,將(X,Y,Z)坐標一并寫入GPF文件中。用新生成的GPF文件替換原有GPF文件,打開工程后可見DOM與時相2匹配點的物方坐標已被改寫,而時相2像片間匹配的點坐標依然為(0,0,0)。
改變已寫入物方坐標的點屬性(從“tie”改為“xyz_check”),之后通過平差,系統會給出每個點的殘差大小,以殘差大小為依據,結合目視檢查的方法刪掉有明顯錯誤的“xyz_check”點。經過若干次平差后,刪除“xyz_check”點以外的其他所有點和工程中的DOM影像。IPS軟件中GPF文件和IPB(IPF)文件通過點名字段連接,通過上面的步驟可知,剩余點在GPF文件中存有其物方坐標,在IPB(IPF)文件中存有對應的像平面坐標,將“xyz_check”點屬性改為“xyz_control”即完成了區域內刺像控點的工作。
3.3 后續處理
引入控制點后完成空三處理,平差之后的成果可以在IPS軟件中進一步處理得到時相2的地信產品,也可直接將其導出為PATB格式,或分析其數據格式,將其轉換為Inpho或其他后續軟件文件格式,以期在其他軟件中完成地信產品生產。在示例數據中,平差之后得到RMSPixel=1.421,RMSX_Control=0.224,RMSY_Control=0.191,RMSZ_Control=0.133。依次執行DTMe—OrthoRectifyMe—StitchMe—Seam line Editor等步驟,完成了時相2 DOM影像的生成。通過對完成后的DOM影像的分析,其結果完全符合1∶1000國家規范。
4 結 語
本文闡述了在地理信息產品更新過程中,采用計算機匹配的方法找出時相1 DOM與時相2像片之間的同名點,再通過DOM的本身屬性和其對應的TFW文件,以及DEM對應點的高程數據,共同得到匹配點的物方坐標。通過平差探測與目視檢查等方法排除了錯誤點位后,將這些點作為控制點存儲,即完成了像控點高精度刺入的目的。以此為基礎,進行下一步的匹配、解算、地理信息產品的生成等。
無人機數據的空間和時間分辨率遠優于遙感數據,因此在需要以無人機影像作為遙感數據分析依據時,DOM同樣可用高分遙感影像如WorldView、Google Earth等代替,處理所得結果可以與目標遙感影像高度匹配。在此處理中,采用計算機自動匹配的方法得到的點位精度遠高于人工刺入點位,可以達到亞像元級別,同時得到的控制點更為均勻稠密地分布在測區內,為精確的空三處理提供基礎保證。