基于Creo的四軸機器人運動分析
2019-04-08 06:21:36文德剛相寧波
工程建設與設計 2019年6期
關鍵詞:水平
文德剛,相寧波
(山東臨工工程機械有限公司,山東臨沂276023)
1 引言
工業機器人主要是指具備多個自由度,由多個運動關節組成,專門用于工業行業的自動化設備,具有自動化程度高,定位準確,工作效率高等特點,按運動關節數量,工業機器人分為三軸、四軸、五軸等多種類型,本文研究對象為連桿式四軸機器人,主要用于碼垛、分揀、搬運等行業。
2 基本原理
連桿式碼垛機器人主要應用平衡吊的原理,主要結構包括底座(見圖1),上部旋轉組件和工作裝置等部分組成,包含4個關節,其中,一軸為整體旋轉,采用中空型RV減速器;二軸為末端裝置上下運動,采用滾珠絲杠進行傳動;三軸為末端裝置水平運動,采用絲杠傳動;四軸為末端裝置旋轉,采用中部輸入型RV減速器。四連桿機器人的工作原理可以簡化為簡易相似三角形,并且當工作裝置關節間尺寸滿足特定關系時,機器人末端位置,于水平、垂直傳動裝置的位置呈線性相關,并且運動最平穩,振動最小。
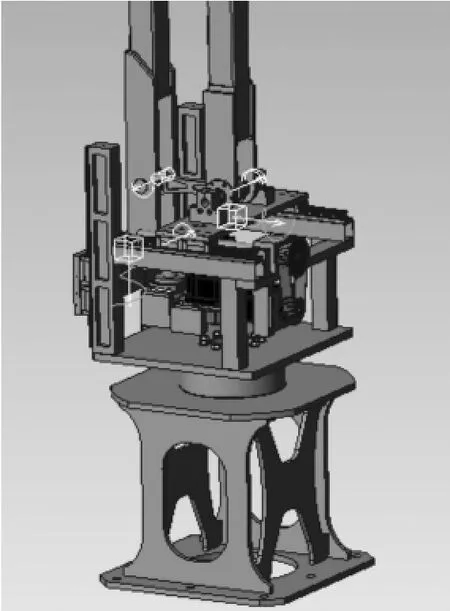
圖1 機器人底座結構
3 主要研究對象
連桿機構通過銷軸與水平滑板上的凸型塊、垂直滑板上的耳座進行連接,其中,垂直滑板上耳座的尺寸對機器人運動范圍有重要影響,因此,本文重點研究垂直滑板耳座銷孔位置與機器人運動范圍之間的關系。
經過前期計算,銷孔與安裝平面的距離范圍為60~120mm,上下運動范圍為[-50mm,330mm],考察水平滑塊位于最后端位置時,短連桿與后動臂交點滿足以下關系:以前動臂下銷軸中心為原點,水平軸往后為X正方向,在后動臂下銷軸位于(190,t)位置時(t為后動臂下銷軸的Y方向坐標),短連桿與后動臂銷軸中心位置D(x0,y0)滿足以下條件:

4 軟件分析
先在Creo Parametric的建模環境中添加測量,定義為后動臂與垂直滑板的角度,并將其保存為測量模型,然后切換到機構模塊中,添加2個伺服電動機,伺服電機1將水平滑板的距離鎖定為-110mm,設垂直滑板位置L,其中γ=[0,10](γ為使L滿足[-50mm,330mm]的變量),運行仿真后,并測量中心距分別為60mm,80mm,100mm時的值,然后在同一個坐標系下繪制圖形,得到結果如圖2所示。
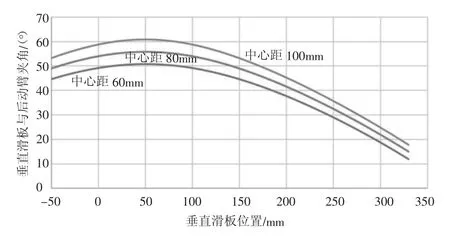
圖2 垂直滑板與后動臂的角度隨位置的變化曲線
經過對比分析,極值點均出現在滑板位置等于48.8附近,將垂直滑板的位置代入方程(1)中求解,得到點D坐標為(300,0)時,即當短拉桿位于水平位置時,后動臂與滑板間的角度最大。
結合垂直安裝導軌和垂直襯板的厚度,最后得出,機械運動中,后動臂與垂直滑板的最大角度與配重耳座中心孔距離l的關系為
而根據機械結構,配重耳座與后動臂不發生干涉的最大允許夾角,以l為橫坐標,繪制α和β的折線圖,如圖3所示。
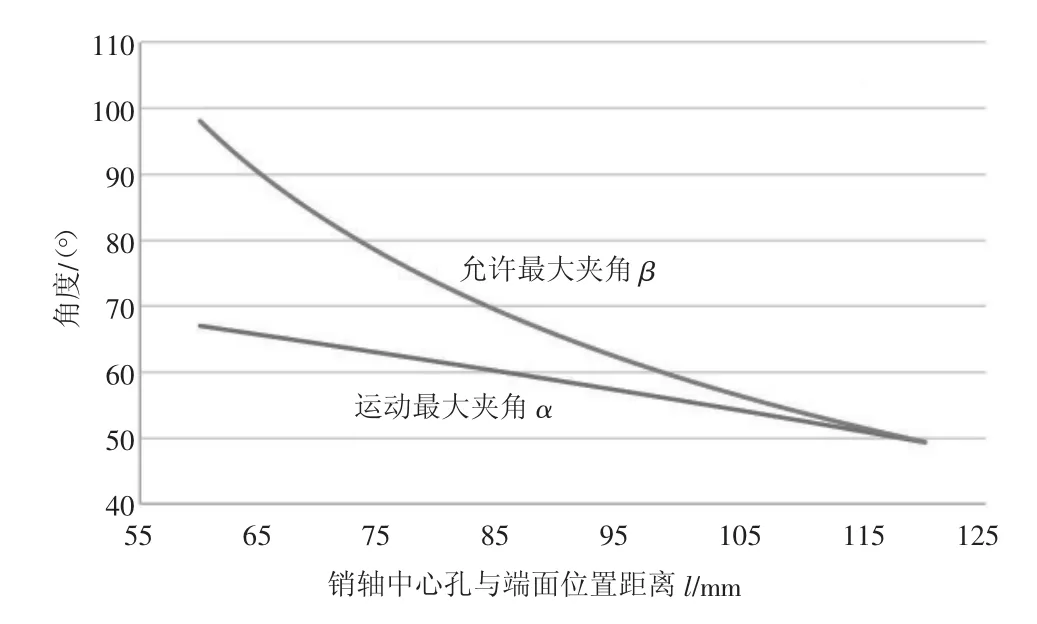
圖3 夾角與距離的關系
從圖3可知,在l>0范圍內,α與β不存在交點(無限接近),因此,均按照β角度進行干涉分析即可。為保證機器人有相關的安全裕度,需要保證機器人在處于軟件限位時,與極限位置留有15mm以上間隙,結合電機與后動臂的間隙,最終選擇銷軸中心孔與端面位置距離為80mm。
5 結果驗證
最后,按照相關選定參數進行設計,并對實物進行測量,結果與軟件仿真一致。
本文結合Creo三維建模與軟件自帶的機構模擬與仿真分析功能,在通過數學方法無法直接求解的情況下,首先利用軟件仿真功能繪制相關參數變化曲線,分析極值出現位置,從而得出多參數優化問題的主要求解辦法,最終結合實際需要得出最佳設計參數,對常見機器人設計具有指導意義。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年6期)2019-10-08 08:55:48
人大建設(2019年12期)2019-05-21 02:55:32
雜文月刊(2018年21期)2019-01-05 05:55:28
人大建設(2017年6期)2017-09-26 11:50:44
學苑創造·A版(2015年11期)2016-01-14 09:03:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
中國火炬(2010年12期)2010-07-25 13:26:22
中國火炬(2010年8期)2010-07-25 11:34:30