基于機器視覺的無人機電力巡線技術
2019-04-26 05:02:50陳鳳翔劉博迪方廣東
電子技術與軟件工程 2019年4期
文/陳鳳翔 劉博迪 方廣東
1 引言
隨著工業用電和人民生活用電量的不斷增加,我國的電力設施建設不斷增加。我國的高壓輸電線不斷應用在遠距離電力輸送中,這種高壓和特高壓的輸電線路對于我國電力資源的輸送具有重要的作用。但是輸電線暴露在大氣環境中,承受大量的自然和認為的影響。因此需要定期對電力線路進行巡查,及時發現線路故障,保障工業和人民生活正常用電。隨著科學技術的進步,傳統的巡線方式已經不適用于目前的巡線工作,機器視覺處理技術的快速發展,促使了無人機巡線技術的快速發展。
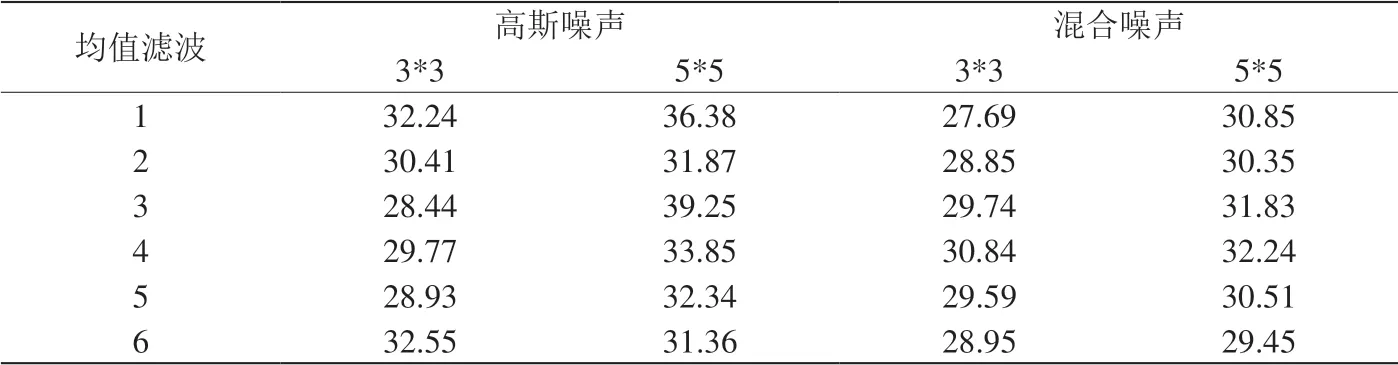
表1:峰值信噪比對比
2 無人機巡線關鍵技術
2.1 無人機巡線特點
隨著無人機飛行技術和機器視覺技術的發展,采用無人機巡線技術已經逐漸應用在電力巡線領域。固定翼型無人機在日常巡線過程中較為常用,該機型的巡航速度在90-250km/h,可以采用手動或自動巡航模式,機動性較好,但是固定翼無人機只能按照單向巡航,且無法懸停。四旋翼無人機是直升機的變形,動力源依靠多個螺旋翼提供,由于機型小、占用空間小、可以在空中懸停的特點,廣泛地應用在電力巡檢中,但是四旋翼無人機也具有質量輕、強風中工作不穩定等缺點。無人駕駛型直升機利用程序自動控制飛行,依靠螺旋槳提供動力,可實現直接起降、懸停拍攝。
由于不同類型的無人機的特點和適用的場景不同,因此針對不同的電力線路狀況,采取不同的無人機組合進行電力巡檢,目前主要采用固定翼無人機和無人駕駛直升機組合以及固定翼無人機和四旋翼無人機組合的兩種無人機巡線組合方式。
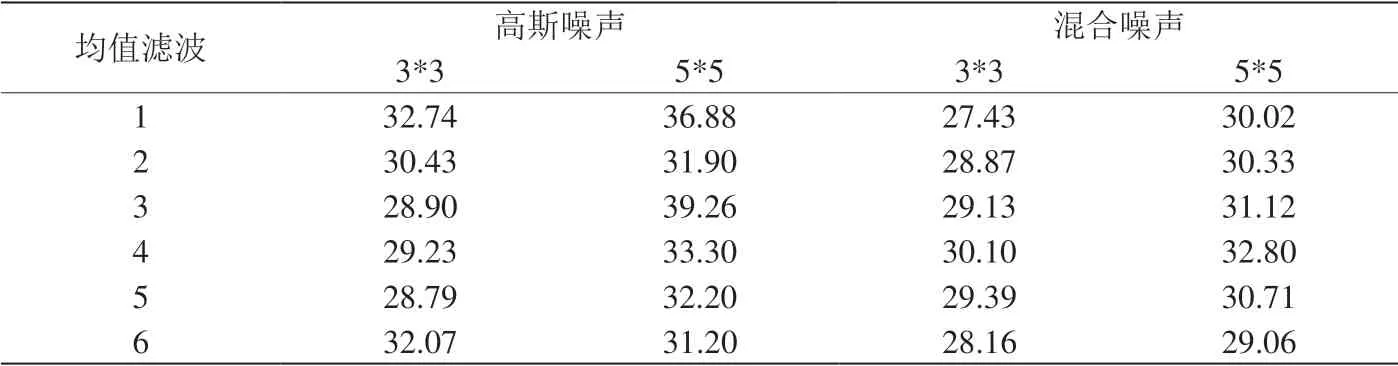
表2:峰值信噪比對比
2.2 無人機巡線系統分析
圖1為無人機巡線系統組成,無人機飛行控制系統是無人機的大腦,主要控制無人機的飛行姿態和巡航的狀態。無人機定位系統主要控制無人機的巡航線路,通過GPS導航系統對巡航線路進行定位,通過數據重構技術進行行程的三維圖形識別。圖像采集模塊主要對航拍圖像進行處理,主要包括濾波、去重復和邊緣檢測等內容,空地通信模塊主要起到信息傳遞和診斷作用。
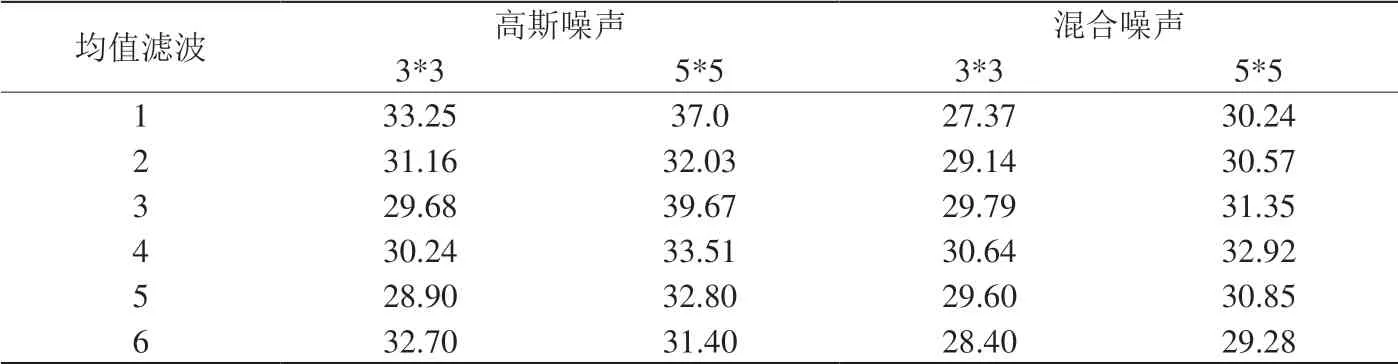
表3:峰值信噪比對比
3 航拍電力線路圖像處理方法
3.1 視頻去噪處理
無人機拍攝的視頻主要存儲在視頻中的關鍵幀中,對無人機拍攝視頻的處理就是對其關鍵幀的處理,無人機在拍攝過程中受到拍攝環境、儀器缺陷、采光等因素的影響,因此對于無人機拍攝的視頻的需要進行除噪處理,提高圖像的品質。本文對比均值濾波、中值濾波和和維納濾波技術去噪效果。均值濾波通過對濾波模板內像素取均值,隨后將待處理的像素點采用像素均均值進行替換,采用函數表示為:
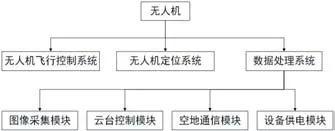
圖1:無人機控制系統
其中n為模板中像素數。模板相應系數為:
中值濾波通過對領域像素排序,對孤立點的像素進行排除,進而實現噪聲抑制和圖像細節的統一,函數表示為:

其中p(x,y)和d(x,y)表示為視頻幀原圖像和去噪后的圖像。
維納濾波是一種典型的線性濾波,主要用來提取被噪聲污染的圖像,主要處理方法是求取一個正常圖像f的估計值計算f和的均方差,求取其最小值min e2。濾波方法如下所示,求取pxy得灰度值:
其中v2為噪聲方差,利用替代原始灰度值f(x,y)。
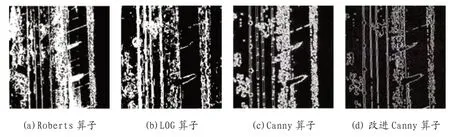
圖2:航拍圖像處理效果圖
3.2 算法實驗對比分析
3.2.1 均值濾波結果
通過對混合有高斯噪音和混合噪音的圖像進行均值濾波處理,選擇3*3模板和5*5模板,對比兩種噪聲處理結果如表1所示。
通過表1可以看出采用5*5模版時結果較好,特別是處理高斯噪聲時,效果相對于混合噪聲更好,但是對于高斯噪聲濾波處理之后導致圖像變得模糊,因此導致了圖像的進一步處理,由此表明,采用均值濾波對圖像進行處理并不完全適用于航拍圖像。
3.2.2 中值濾波
通過采用中值濾波技術對混合有高斯噪音和混合噪音的圖像進行均值濾波處理,選擇3*3模板和5*5模板,對比兩種噪聲處理結果如表2所示。
通過表2可知,中值濾波處理噪聲圖像的效果也非常不理想,但是相對于均值濾波來說處理效果較差,雖然采用中值濾波處理孤立噪聲點較為優良,對于高斯噪聲和混合噪聲的處理效果非常不理想,由此表明采用中值濾波處理航拍視頻也不是最優良的方案。
3.2.3 維納濾波
通過采用維納濾波技術對混合有高斯噪音和混合噪音的圖像進行均值濾波處理,選擇3*3模板和5*5模板,對比兩種噪聲處理結果如表3所示。
采用維納濾波技術處理混合噪聲較為理想,可以極大程度上去除多余的噪音,并且對于圖像的細節可以更好的保留,對于圖像的后續處理更為方便可靠。通過對比分析可以發現,維納濾波處理圖像噪音的效果較好。
4 復雜背景下電力線路提取、識別和跟蹤
4.1 圖像分割
圖像分割技術是根據既定的分割規則,將圖像分割成獨立的區域。在一幅圖像上,我們往往只關注紋理、顏色和灰度等與周圍具有一定區別區域的特征,往往這些區域的差別非常小,因圖像分割主要就是將這些區域識別出來。本文對Roberts算子、LOG算子、Canny算子和改進Canny算子進行邊緣檢測,檢測結果如圖2所示。
如圖2所示,Roberts算子的電力線的提取效果最差,主要是由于Roberts算子沒有降噪平滑處理導致的;LOG算子受噪聲的影響較小,主要是LOG算子提前做了高斯濾波處理,但是電力線邊緣的較為模糊;Canny算子提取的效果相對于Roberts算子和LOG算子稍微好一些,但是背景和輸電線的區分不是十分明顯,并且像素點過于堆積;改進Canny算子,較好的提取邊緣,并且對于噪聲較好的進行了抑制。通過對圖像分割發現,采用一種算子進行圖像提取,效果往往達不到要求,還需要進一步進行處理。
4.2 電力線算法提取
通過圖像分割中圖像邊緣提取之后發現,需要進一步采取圖像處理技術進行圖像處理。算法的處理效果主要通過以下兩個方面進行評價:首先是邊緣點的檢測數量;其次是線型分布是否平滑。由圖3a可以看出采用Hough變換算法提取電力線較為不完整,主要是Hough變換對于強對比度的圖像提取不完整;圖3b采用相位編組融合算法與Hough算法恰恰相反,相位編組融合算法對于低對比度的圖像敏感度較高,因此提取的線形較為平滑,穩定度相對較高,但是此種算法提取出道路邊緣,干擾性較大;圖3c為采用融合算法的實驗圖,如圖所示,該算法對于電力線的提取程度較為完整,兼有兩種算法的優點。
5 總結
本文基于機器視覺得無人機電力巡檢工作,分析了無人機尋線關鍵技術、無人機巡線系統關鍵問題、航拍電力線路圖像處理方法三方面的內容。根據各種類型無人機的優缺點,發現采用固定翼無人機和無人駕駛直升機組合以及固定翼無人機和四旋翼無人機組合的兩種無人機巡線組合方式較為符合目前我國的電力線路實際情況;采用維納濾波處理圖像噪音的效果相對于均值濾波和中值濾波效果更好;采用一種算子進行圖像提取,效果往往達不到要求,還需要進一步進行處理,Hough變換和相位編組融合算法對于電力線的提取程度較為完整,兼有兩種算法的優點。