六自由度機械臂的基于Hermite曲線的空間位置軌跡插補技術
2019-04-27 01:37:48廖儒娟
科技資訊 2019年1期
廖儒娟
摘 要:采用標準的D-H建模方法建立機械臂的運動學模型,對機械臂的正反運動學進行分析。運用空間矢量合成設計軌跡插補算法,空間位置插補采用Hermite空間位置插補的方法,編制Matlab處理程序。完成六自由度機械臂的空間軌跡插補的仿真,證明該理論的可行性。
關鍵詞:六自由度機械臂 D-H建模 位置插補 姿態插補 Matlab
中圖分類號:TP242 文獻標識碼:A 文章編號:1672-3791(2019)01(a)-0-02
1 Hermite曲線的基本算法
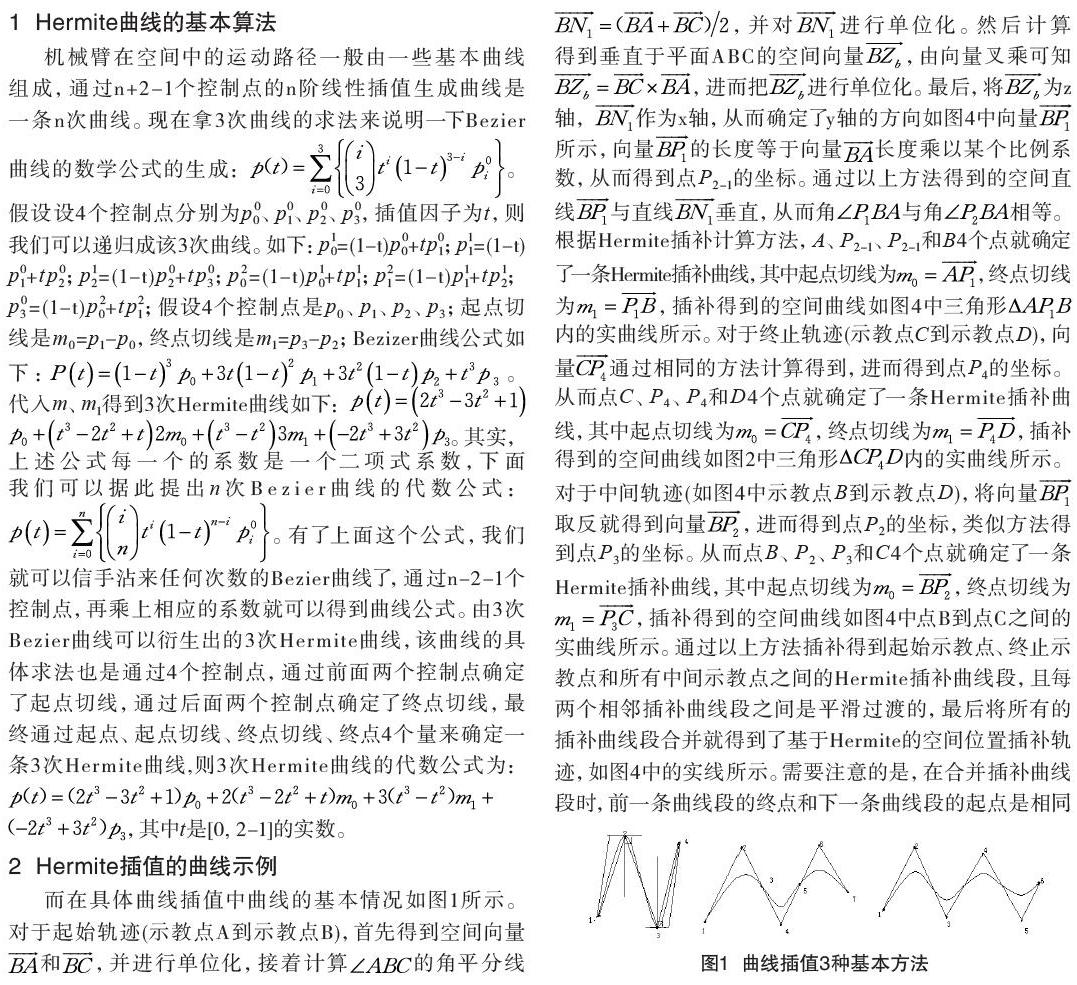
2 Hermite插值的曲線示例
3 基于MATLAB空間軌跡插補程序設計與實現
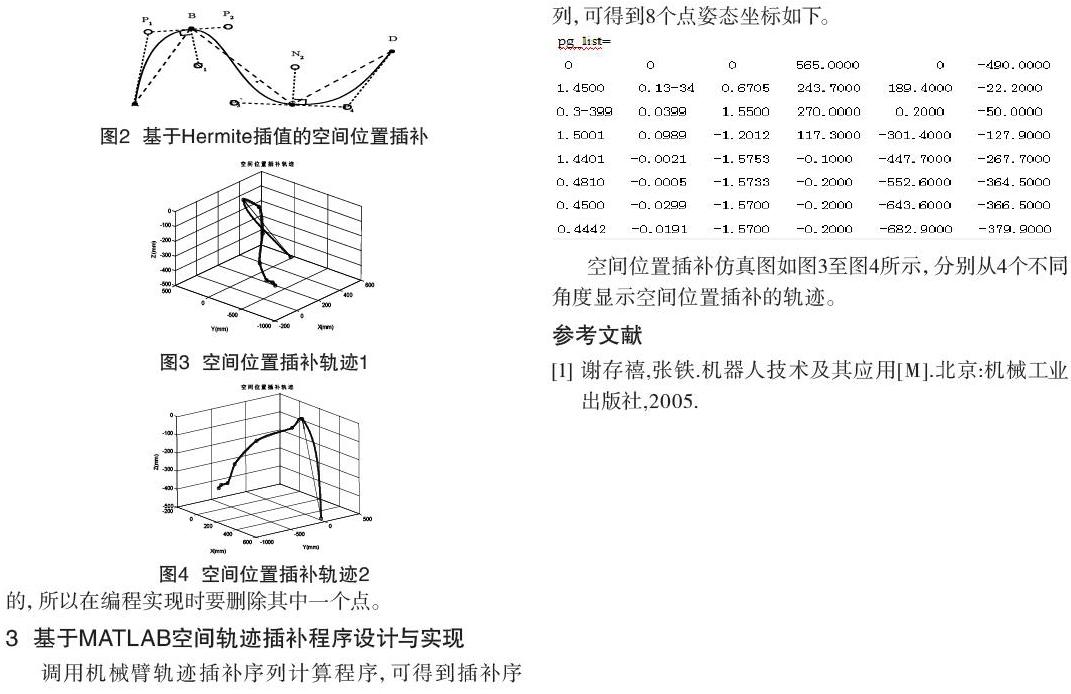
調用機械臂軌跡插補序列計算程序,可得到插補序列,可得到8個點姿態坐標如下。
空間位置插補仿真圖如圖3至圖4所示,分別從4個不同角度顯示空間位置插補的軌跡。
參考文獻
[1] 謝存禧,張鐵.機器人技術及其應用[M].北京:機械工業出版社,2005.
