城市園林景觀交錯帶空間格局三維重建系統設計
2019-04-28 12:24:23丁志軍
現代電子技術 2019年24期
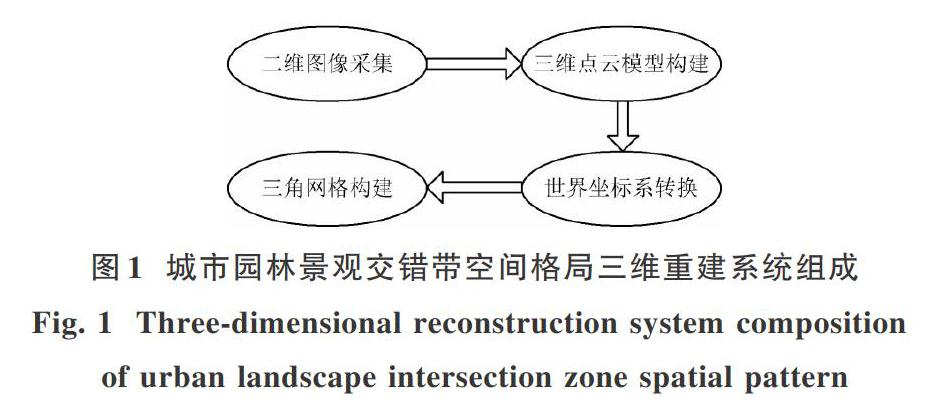

摘要:三維重建系統可重現城市園林景觀交錯帶空間格局,為城市生態環境規劃、城市空間布局提供有效的設計方式。城市園林景觀交錯帶空間格局三維重建系統基于雙目立體視覺原理采集園林景觀格局的二維圖像,根據兩幅二維圖像特征點得到對象的三維坐標點,構建三維點云模型;基于視口轉換矩陣和屏幕坐標轉換值世界坐標系中,采用三角網生長算法構建城市園林景觀交錯帶空間格局Delaunay三角網格模型,經外觀渲染與紋理映射后,完成城市園林景觀交錯帶格局三維重建。系統測試表明,重建的三維城市園林景觀交錯帶空間格局布局合理、外觀逼真,體現了景觀交錯帶的主要特征。
關鍵詞:三維重建;城市園林景觀;交錯帶;空間格局;生長算法;系統測試
中圖分類號:TN911.73-34:TU986
文獻標識碼:A
文章編號:1004-373X( 2019) 24-0154-04
城市園林景觀交錯帶空間格局是園林景觀設計的主要部分,是園林景觀脈絡、空間布局的主要體現“,。城市發展過程中需要不斷規劃城市園林景觀布局、優化園林景觀交錯帶分布,以調節城市生態環境、節約城市規劃空間[2]。計算機技術高速發展,城市園林景觀交錯帶空間格局三維重建技術能夠高度還原城市園林布局[3],將龐大規模的空間格局縮小在圖形軟件中,為逆向工程設計提供快速、有效的表達方式[4]。本文設計城市園林景觀交錯帶空間格局三維重建系統,目標是重現準確、逼真、可視化的城市園林景觀交錯帶空間格局,為再現城市園林景觀交錯帶、優化城市園林景觀合理布局提供有效方式。
1 三維重建系統設計
城市園林景觀交錯帶空間格局三維重建總體思路如下:
1)基于雙目立體視覺原理獲取園林空間格局三維坐標,即采用相機拍攝得到同一場景、不同角度的兩幅圖像[5],基于兩幅二維圖像得到物體各點三維坐標,利用各點構建的三維模型是點的集合,即點云[6];
2)恢復三維點云屏幕坐標至世界坐標系中;
3)利用離散的點云數據構建三角網格模型[7],實現城市園林景觀交錯帶空間格局三維重建。系統組成如圖1所示。
1.1 三維點云模型構建
攝像機基于雙目立體視覺原理獲取園林交錯帶空間格局的三維坐標,無干擾情況下雙目立體視覺原理如圖2所示。
基于雙目立體視覺原理,兩個攝像機內外參數相同情況下,任意攝像機像平面中存在與另一臺攝像機對應的特征匹配點時,基于式(1)可得到此點三維坐標[7]。
物體表面海量三維坐標點9成為點云,點云組成物體三維點云模型,基于三維點云模型構建三角網格模型完成園林三維重建,在此之前應將三維點云屏幕坐標轉換至世界坐標中。
1.2 三維模型屏幕坐標向世界坐標的轉換
屏幕坐標點向世界坐標系的轉換基于視口轉換矩陣實現,視口轉換矩陣為:
1.3 Delaunay三角網格構建
三維模型坐標轉換至世界坐標系后,開始構建三維網格模型,完成城市園林景觀交錯帶空間格局三維重建。收縮生長算法、擴張生長算法是三角網格生長算法的兩個方向[9],系統采用三角網生長算法中的擴張生長算法構建城市園林景觀交錯帶空間格局模型三維網格。算法構建三維網格思路如下:連接點集中距離最小的兩點形成一條邊,基于Delaunay構網原則獲取第三個點,三點連接得到三角形[10];沿著基線擴展連接距離較近的點(初始三角形的三邊為基線)得到多個三角形,全部離散點涵蓋在三角網中后,完成三角網格構建。
基于上述過程實現城市園林景觀交錯帶空間格局三維重建,為提升模型美觀效果,最后對三角網格模型展開紋理映射,渲染模型外觀,得到逼真、可視化的城市園林景觀交錯帶空間格局三維模型。
2 系統測試
以某城市局部園林景觀交錯帶為實例展開仿真系統測試,評估本文的城市園林景觀交錯帶空間格局三維重建系統性能與效果。該園林景觀占地約1.12公頃,其中景觀交錯帶占地約0.89公頃,景觀交錯帶在園林景觀格局中的平面布局如圖3所示。該園林景觀包含現代園林、中國古典園林、鄉村庭院式園林以及自然風景園林四種園林風格。
2.1 系統三維重建結果展示
本文系統以城市園林景觀為實例構建交錯帶空間格局模型,構建的地形Delaunay三角網格模型如圖4所示。
圖4中,全部點均包含在三角網格中,說明構建De-launav三角網格模型效果較好,不存在遺漏坐標點的情況,可準確還原地形起伏程度。
本文系統重建的現代風格的園林景觀交錯帶三維效果圖如圖5所示。
本文構建的三維景觀交錯帶空間格局模型布局合理、外觀逼真,體現了景觀交錯帶的主要特征,用戶觀看三維重構模型即可整體把握城市園林景觀空間格局的風格、布局等情況。
2.2 系統平均重建誤差分析
通過定量的方式評估本文系統重建城市園林景觀交錯帶空間格局的效果,采用平均重建誤差評估本文系統三維重建結果,平均重建誤差計算方法為:
基于平均重建誤差分析本文系統重建三維模型的效果,選取4條不同類型的景觀空間交錯帶作為三維重建對象,每個交錯帶取8個重建視角,基于式(4)計算本文系統重建城市園林景觀交錯帶空間格局的平均重建誤差,結果如表1所示。
表1中,本文系統重建城市園林景觀交錯帶空間格局的誤差有所不同,重建現代園林交錯帶格局、自然風景園林交錯帶格局的平均誤差在0.012 - 0.013之間,重建中國古典園林、鄉村庭院式園林交錯帶空間格局的誤差區間分別為0.010 - 0.012,0.015 - 0.016。由于不同類型的園林景觀構造不同,導致本文系統重建景觀交錯帶空間格局誤差存在差異,但是總體誤差均低于0.1,符合精準重建標準,因此,本文系統是一種可靠的城市園林景觀交錯帶空間格局三維重構系統。
3 結論
本文系統重建城市園林景觀交錯帶空間格局的效果逼真、布局合理,體現了景觀交錯帶的主要特征。文中首先采集園林空間格局的二維圖像后得到物體各點的三維坐標,構建三維點云模型;將屏幕坐標轉換至世界坐標系后,利用離散的點云數據構建三角網格模型完成城市園林景觀交錯帶空間格局三維重建。三維重建過程中,提取兩幅二維圖像的特征點十分關鍵,決定構建的三維模型是否精準,因此,可從精準提取二維圖像特征點角度提升三維重建系統的建模準確度。
參考文獻
[1]謝啟姣,段呂晗,汪正祥,夏季城市景觀格局對熱場空間分布的影響:以武漢為例[J].長江流域資源與環境,2018,27(8):84-93.
XIE Qijiao. DUAN Luhan. WANG Zhengxiang. Impact of ur-ban landscape pattern on spatial distribution of thermal field insummer: a case study of Wuhan [J]. Chinese journal of me-chanical engineering, 2018, 27(8):84-93.
[2]鄧羽.城市空間擴展的白組織特征與規劃管控效應評估:以北京市為例[J].地理研究,2016,35(2):353-362.
DENG Yu. Self-organization characteristics of urban extensionand the planning effect evaluation:a case study of Beijing [J].Geographical research, 2016. 35(2): 353-362.
[3]成實,成玉寧.從園林城市到公園城市設計:城市生態與形態辨證[J].中國園林,2018,34( 12):47-51.
CHENG Shi. CHENG Yuning. Form garden city to park citydesign: the dialectic relationship between urban ecology andmorphology [J]. Chinese landscape architecture. 2018. 34( 12):47-51.
[4]馬東嶺,王曉坤,李廣云,利用圖割算法進行城市密集點云表面模型重建[J]測繪通報,2019(2):45-48.
MA Dongling, WANG Xiaokun. LI Guangyun. Reconstructionof urban dense point cloud surface model using graph-cuts algo-rithm [J]. Bulletin of surveying and mapping, 2019(2):45-48.
[5]李瑩,林宗堅,蘇國中.多視影像的城市實景三維生產關鍵技術[J]遙感信息,2017. 32(1):35-39.
LI Ying, LIN Zongjian. SU Guozhong. Key technology of pro-duction of city real 3D images [J]. Remote sensing information,2017. 32(1):35-39.
[6]李肖,葛寶臻,羅其俊,等.自由雙目立體視覺攝像機動態外參數的獲取[J].計算機應用,2017,37(10):2888-2894.
LI Xiao. GE Baozhen, LUO Qijun,et al.Acquisition of cam-era dynamic extrinsic parameters in free binocular stereo visionsystem [J]. Journal of computer applications, 2017, 37 (10):2888-2894.
[7]王澤吳,黃常標,林忠威,三角網格模型的最小值邊界分割[J].計算機輔助設計與圖形學學報,2017,29(1):71.
WANG Zehao. HUANG Changbiao. LIN Zhongwei. Trianglemesh shape segmentation based on detection of minima ruleboundaries [J]. Journal of computer-aided design&computergraphics, 2017. 29(1): 71.
[8]熊風光,蔡晉茹,況立群,等.三維點云模型中特征點描述子及其匹配算法研究[J]小型微型計算機系統,2017. 38(3):640- 644.
XIONG Fengguang, CAI Jinru. KUANG Liqun, et al.Studyon descriptor and matching algorithm of feature point in 3Dpoint cloud [J]. Journal of Chinese computer systems. 2017, 38(3):640-644.
[9]丁瑩,范靜濤,宋天喻.雙目立體視覺檢測系統正向最優化設計方法研究[J]儀器儀表學報,2016.37(3):650-657.
DING Ying, FAN Jingtao, SONG Tianyu. Optimal forward de-sign method for the binocular stereo vision inspection system[J]. Chinese journal of scientific instrument, 2016. 37(3): 650- 657.
[10]楊景豪,劉巍,劉陽,等.雙目立體視覺測量系統的標定[J]光學精密工程.2016.24(2):300-308.
YANG Jinghao, LIU Wei, LIU Yang. et al.Calibration ofhinocular vision measurement system [J]. Optics and precisionengineering, 2016, 24(2): 300-308.
作者簡介:丁志軍(1972-),男,山東濰坊人,碩士,高級工程師,研究方向為電子規劃設計。
