光電式數種器的設計與試驗
2019-05-08 06:41:52呂澤鑫郭慧東伍恒張航李風娟雷福祥周嶺
塔里木大學學報 2019年1期
呂澤鑫 郭慧東 伍恒 張航 李風娟 雷福祥 周嶺
(塔里木大學機械電氣化工程學院,新疆 阿拉爾843300)
千粒重[1]通常要數取一千粒完好的種子,再進行稱量,其重量即為種子千粒重。但人工數取一千粒作物種子,不但增加了育種成本,而且計數也不準確[2]。數種盤[3]利用定量窩眼計數省時省力,但無法完成自動化的數種要求,且數種結果累加性較差。機械數種器[4-8]利用振蕩原理將種子均勻的散布在平面上,再以種子流的形式依次通過光電傳感器進行計數。數種器可以完成自動化的數種作業,但計數結果精確性不高,數種時間較長,振蕩過程會損傷種子。基于計算機視覺識別技術的種子計數器[9]是將種子平鋪在特定平臺上,利用強光照射平臺,再用計算機視覺識別技術捕捉種子在平臺上所成的像。計算機視覺識別技術計數快速、多量,但強光照射會對種子胚芽有所損傷[10]。
針對上述問題,設計一種光電式數種器,數種器由計數系統、動力系統、收集系統和運送系統組成。具有快速數種、計數準確、損種率低、操作簡便、適用性強等優點。
1 光電式數種器的組成及工作原理
光電式數種器(圖1)主要由計數系統、動力系統、收集系統和運送系統四部分構成。
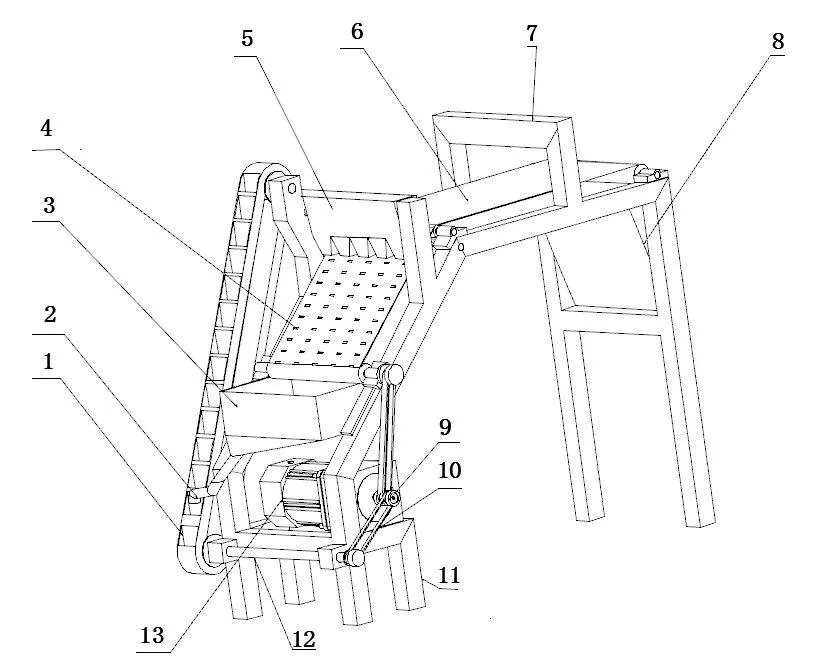
圖1 光電式數種器
工作時,電機啟動帶動傳送帶勻速運轉,將一定量的種子放到下種盒內,種子由下種盒下種口落下,散落在傳送帶上的計數凹槽內,計數凹槽內的種子隨著傳送帶經過紅外計數傳感器,傳感器接受模擬信號,單片機處理模擬信號轉化成數字信號顯示在顯示屏上,計數過的種子落入接種盒內。未落入計數凹槽內的種子會沿著斜傳送帶掉入到收集箱內,由運種盒通過軌道重新進入下種盒循環計數。
2 主要結構設計
作物種子的形狀大多是不規則的,不同時期的種子外形也有所不同。依據棉花、玉米、稻谷、小麥等作物種子的普遍特性將其假設為橢圓柱體[11]。對光電式數種器計數凹槽形狀和大小,下種盒的結構與光電計數系統進行創新設計。
2.1 傳送帶計數凹槽形狀的選擇
為提高計數凹槽的充種率、單粒計數精度和數種速度,將傳送帶計數凹槽設計為傾斜形(圖2a)和直立形(圖2b)兩種[12]。直立型計數凹槽打孔簡單,方便種子落入。相較而言,傾斜形計數槽采用開口錐形設計,其錐面能夠減小種子的滑出阻力,降低種子堵塞,有效減少計數槽的空槽率,降低種子的破損率。因此,本設計傳送帶計數凹槽選擇傾斜型孔槽。
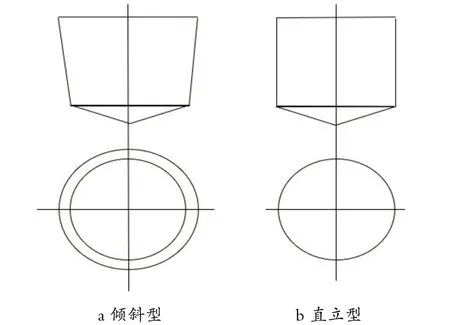
圖2 傳送帶計數槽形狀示意圖
2.2 傳送帶計數凹槽尺寸的選擇
傳送帶計數凹槽在于固定種子相對位置和保障種子按粒計數。每條傳送帶上設置五排計數凹槽,每一排凹槽間的種子在計數時互不影響。根據光電傳感器的有效范圍,每排計數凹槽間距為100 mm,行距為40 mm。傳送帶全長為1 400 mm。
用精度為0.01 mm的千分尺測量種子三維尺寸,然后根據三維尺寸求出相應的等效長、寬和高,而部分種子三維尺寸如下(表1):
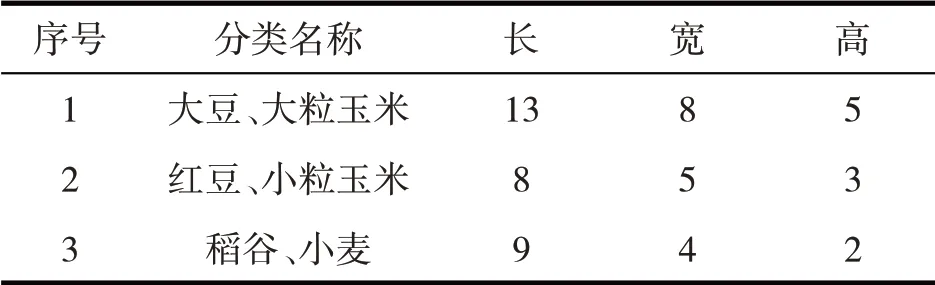
表1 部分種子尺寸模型單位:mm
因此,將傳送帶計數凹槽的尺寸分類設計為A類(13 mm×8 mm×5 mm)、B類(8 mm×5 mm×3 mm)、C 類(9 mm×4 mm×2 mm)三種不同的傳送帶,滿足對不同品種種子的計數要求。
2.3 下種盒的設計
下種盒(圖3)采用雙層空腔式設計,上下兩層之間用一塊鈍角三角形擋板隔開。上層承裝待數種子,下層設計五個下種口,每個下種口正下方對應一排計數凹槽,既保證了下種速度也保證了每個計數凹槽里面只有一粒種子。
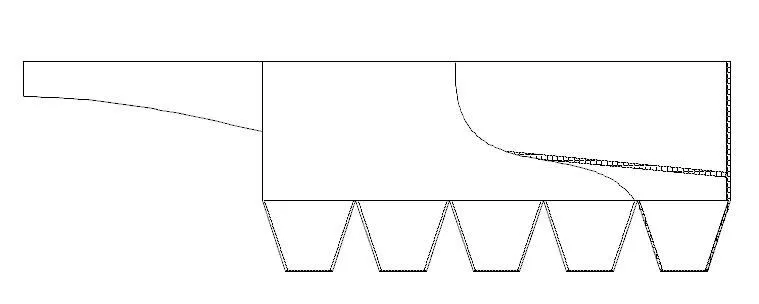
圖3 下種盒結構圖
2.4 光電計數單元的設計
設計選用光電式傳感器[13-15]。工作時,被測變化量轉換成光信號,借助光電元件將光信號轉換成電信號。光電式數種器選用光電計數單元為E3FDS30P1 漫反射型光電開關[17-19]。開關檢測內部裝有一個發光器和一個收光器,正常情況下發光器所發出的光無法被收光器捕捉,在物體擋住入射光的傳播路徑時,入射光就會有一部分被反射回來,收光器收到反射回來的光信號,經過處理后輸出一個開關信號,完成一次計數。
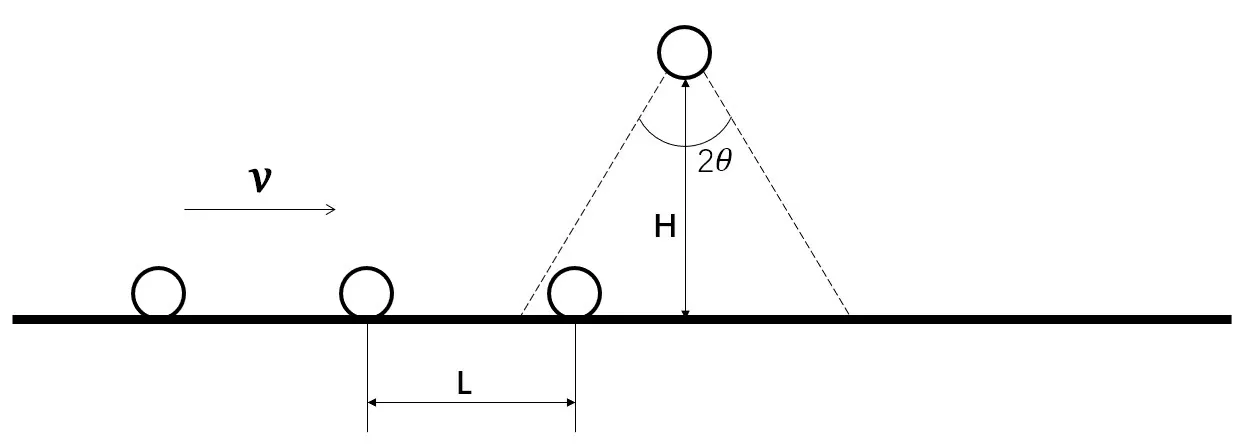
圖4 光電計數單元模擬工作圖
待數種子經過光電傳感器正下方時計數一次,傳送帶上每一排槽口上方都安裝有光電傳感器。計數后顯示器接收信號并顯示計數結果。
光電傳感器工作過程簡化模型(圖4),圖中H 為光電傳感器距傳送帶的距離,2為光電傳感器的感應范圍角,L為每排槽口間距離,v為傳送帶的行進速度。光電傳感器的信號傳遞速度為光速,響應時間為t0,信號在光電傳感器和傳送帶間的傳遞時間近似t→0,為保證計數結果的準確性,有:L>H·sinθ+v·t0,H<(L-v·t0)/sinθ,代入 數 據得H<[(100-v)/sinθ]×10-3m(v 的 單 位 為m/s,0≤θ ≤20°),關 系 是H<(820-0.82v),由此計算可知,為保證計數結果的準確性,應保證H和v的正常關系。
3 軟件系統
光電式數種器采用STC-89C52單片機控制[20-22],傳感器為E3F-DS30P1 漫反射型光電開關,用Keilu-Vision4 語言編寫程序[23]。每個光電傳感器輸出信號,經累加器運算后將最終數字顯在顯示器上。斷電情況前的計數結果保存到單片機內,重新開機后輸出到顯示器上,誤差率保持在較小范圍內。
電路(圖5)中共有36 V 和5 V 兩組電源,36V 電源電壓給光電傳感器和顯示器供電,5 V 電源電壓給單片機供電。5 個光電傳感器直接與單片機相連,在接收到種子所反射的光信號后,將光的模擬信號變化量轉化成電信號變化量通過一個引腳輸入到單片機,單片機根據輸入信號電壓值的大小,換算出輸入信號的個數(即種子的數目),每隔0.2 s 輸出一個電信號到顯示器輸入引腳,顯示器每收到一個輸入電信號就累加一[24-25]。
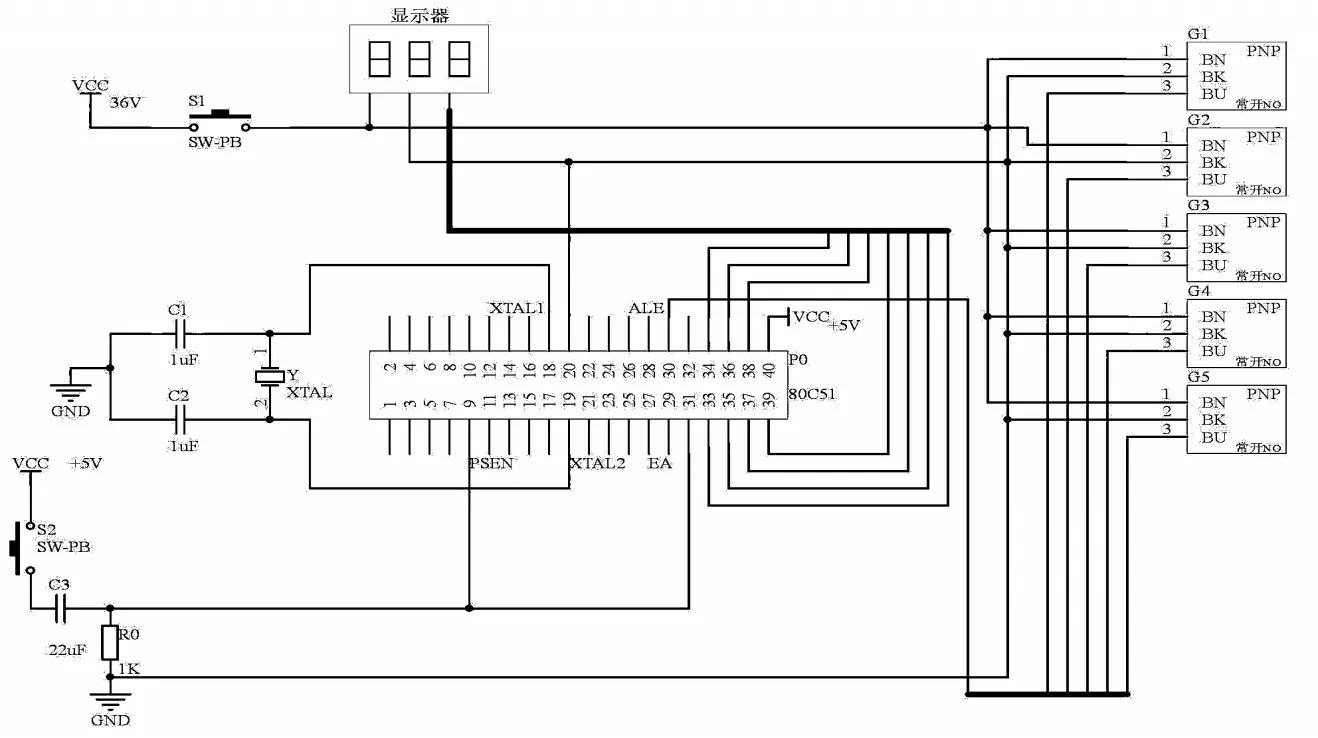
圖5 電路原理圖
單片機處理輸入信號能有效減小計數結果的誤差率,顯示器可以直觀的讀出計數結果,且帶有記憶功能,斷電時可以自動保存當前計數結果。顯示器有清零按鍵,在計數完成并進行下一次計數時可以直接清零。
4 實驗驗證
實驗分為三組,第一組兩名熟練的數種工人在1 m2的方臺上利用尺子10 粒種子為一排,1 000 粒為一組進行人工數種。第二組使用網上購買的SLY-C數粒器(自動化操作、無噪音、精度高、大中小粒種子通用型),其工作時使種子形成單粒的種子流,利用單個光電傳感器對通過的單粒種子進行計數。第三組采用本文所設計的光電式數種器。將數種五個光電傳感器調試在全通狀態,待數種子放入到下種盒內,傳送帶以0.02 m/s的速度勻速運動進行數種作業。
三組均進行1 000 粒種子的計數,通過精確度和數種時間進行對比。為保證種子數目的準確性,每組共有10 人數種工作,每人數100 粒,重復數三遍,每次數出種子數目都為100 粒時將10 人數的種子集合起來用于實驗計數。
4.1 實驗結果準確性對比
通過實驗得出的數據(表2)所示

表2 不同數種方式準確性對比 單位:粒
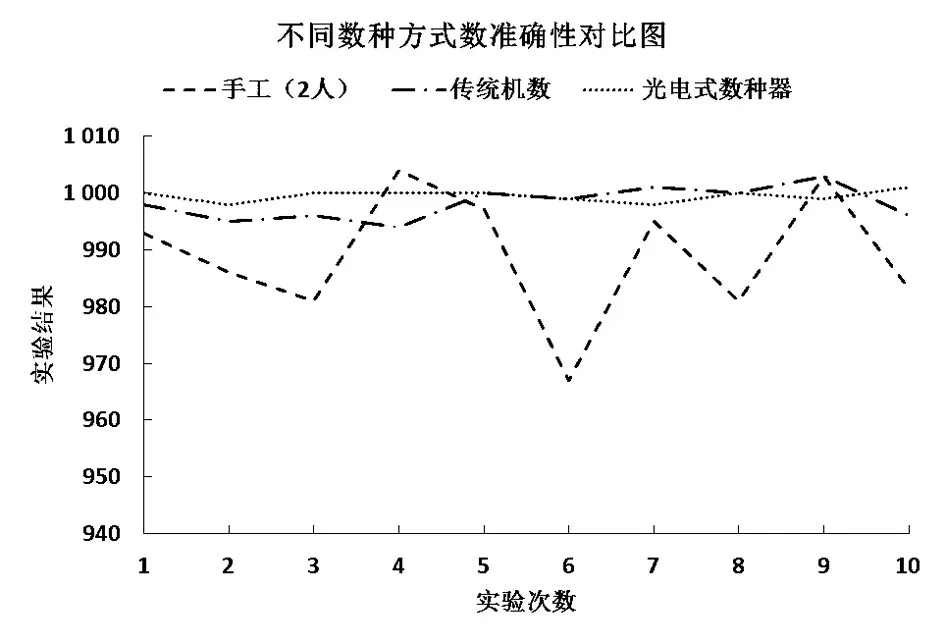
圖6 不同數種方式準確性對比圖
由圖6 可知,傳統人工數種的誤差率為10%,SLY-C數粒器數種誤差率為1.64%,光電式數種器的數種誤差率為0.45%。
4.2 實驗數種時間對比
通過實驗得出的數據(表3)所示
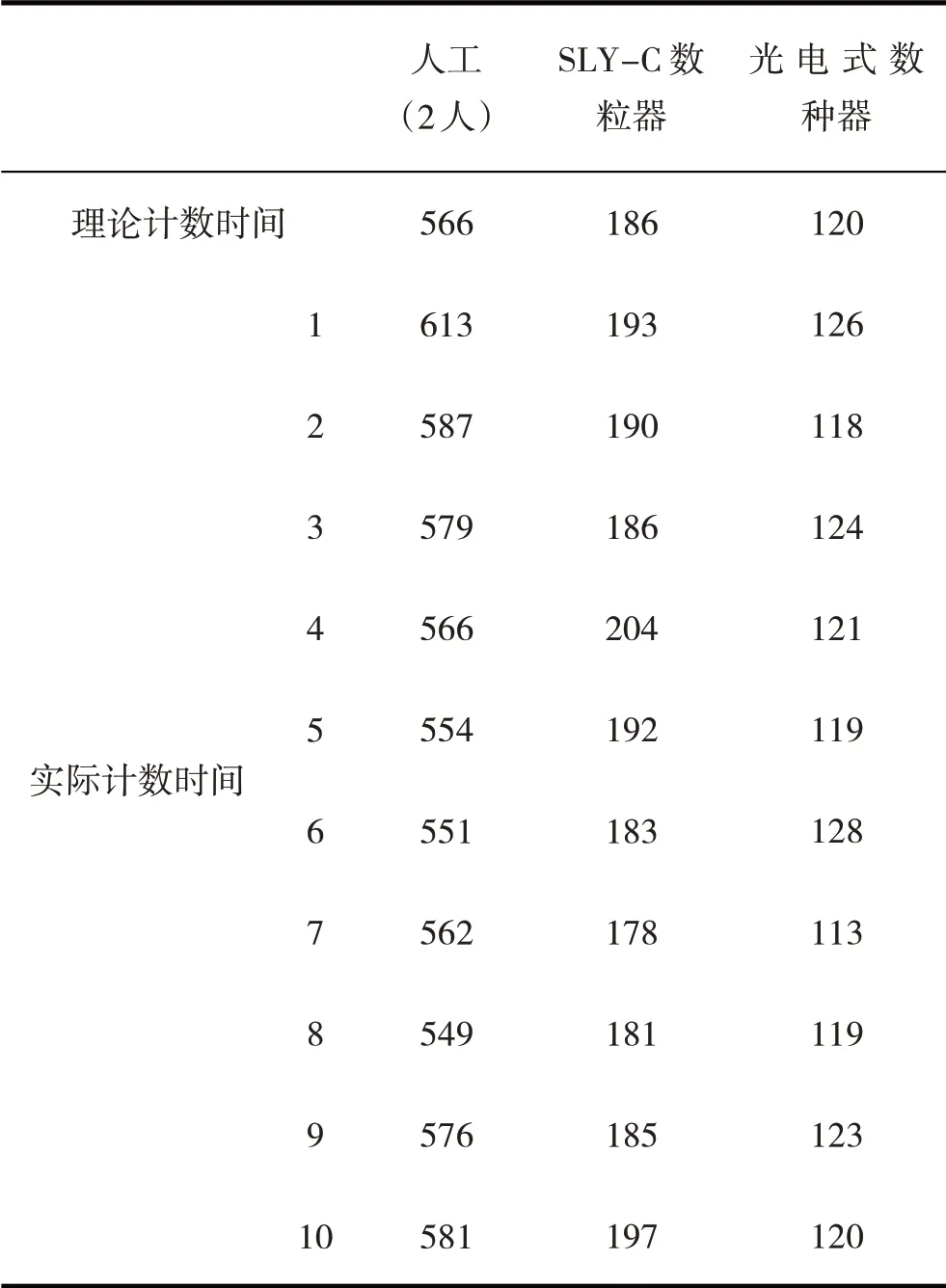
表3 不同數種方式數種時間對比單位:秒
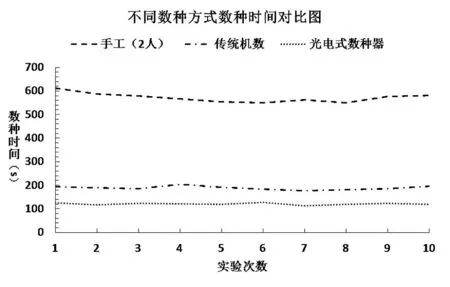
圖7 不同數種方式數種時間對比圖
由圖7 可知,光電式數種器比兩個數種工人數種效率高472. 17%,比SLY-C 數粒器數種效率高155.99%。
5 結論
光電式數種器由計數系統、動力系統、收集系統和運送系統組成。利用傳送帶表面計數槽進行計數,利用光電式傳感器和單片機進行控制,實現智能、精準、快速數粒。傳送帶勻速前進,保證了數種結果的精確性,種子只與傳送帶和盒體接觸,相對運動小,對種子傷害小,保證種子的品質。因此,光電式數種器可以為農作物種子的顆粒計數提供有力的技術支持。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
