在3GPP室外場景下基于粒子群優(yōu)化算法的多用戶定位方案
2019-05-08 12:59:06史楨宇
通信電源技術 2019年4期
史楨宇,胡 濱,王 藝
(華為技術有限公司,上海 200000)
0 引 言
近年來,精準定位廣泛應用于蜂窩移動網(wǎng)的多個場景,如物聯(lián)網(wǎng)、自動駕駛、定點廣告投放、社交及無人機等。相對于前代移動通信,5G對定位精度提出了更高要求,達到米級的定位精度[1-2]。蜂窩網(wǎng)中,可通過移動網(wǎng)絡的終端用戶設備,如手機和平板等,將測量信息上報給基站和核心網(wǎng),也可通過基站測量信息并上報給核心網(wǎng),然后在核心網(wǎng)側對終端進行位置計算。目前,在基站側或者終端設備側的主流測量有時間差(TDOA)、達到時間(TOA)、波達方向(DOA)、接收信號強度及歷史信息等。核心網(wǎng)側的定位功能模塊基于收集的測量信息計算出終端的具體位置[3]。3GPP標準中對于定位的支持最早出現(xiàn)在Release 9的版本,并在后續(xù)版本中有所加強[4-5]。目前的版本支持的定位方式有基于單站距離和角度測量的增強型小區(qū)索引(Enhanced Cell ID,E-CID)的定位方式和基于多站時間差測量的觀察達到時間差(Observed Time Difference of Arrival,OTDOA)的定位方式等。但是,由于測量值的不準確性和算法局限性等問題,在LTE網(wǎng)絡部署下,只能達到30 m的定位精度,無法滿足5G的定位要求。
現(xiàn)有的LTE單用戶定位方案主要基于單個用戶相對于多個基站的時間差測量,在已知多個基站位置的條件下,通過多個雙曲點找交叉點的方式來找到用戶位置,即最常用的OTDOA定位。OTDOA定位算法比較經(jīng)典的方法有基于Chan式的二次加權最小二乘法(Second Weighted Least Square,2WLS)、高斯牛頓(Gauss-Newton)算法及梯度算法等[6]。實際傳輸中,由于基站和用戶設備之間存在時間同步的問題,測得的時間差存在誤差,影響最終定位的準確性,因此需依靠其他測量量來抵消,如來波方向和用戶設備之間的距離信息等。本文提出的PSO算法,不僅實現(xiàn)了在單用戶上基于多個測量量的定位,還融合了多個用戶的測量量。PSO算法的提出最早受生物學中動物群體遷徙行為的啟發(fā),如魚群的移動和大雁南飛等[7]。群體中的每個個體往各自的方向移動,同時整個群體保持往一個方向移動。這種群體的移動方式也可用于優(yōu)化方案。某個區(qū)域內(nèi),所有搜索種子可以以既參考個體又服從群體的方式進行搜尋,最終所有種子匯聚到的位置即為尋找到的最優(yōu)解。由于這種搜尋方式可并行化處理,因此在實際系統(tǒng)中較易實現(xiàn)[8]。
分析PSO在單用戶的OTDOA方案發(fā)現(xiàn),該算法相對2WLS算法更接近理論界限[9-10]。本文將該算法擴展到更多的測量量,除基站和用戶的距離測量外,PSO算法也融合了DOA和U2U的距離。同時,在用戶設備移動的情況下,利用卡爾曼濾波器進一步平滑定位的軌跡,優(yōu)化用戶的位置。
1 時延和角度的誤差模型
多個基站與用戶設備的距離可通過測量下行或者上行的時延來獲得[11]。例如,測量下行時延時,基站向用戶設備發(fā)送一組序列作為定位參考信號序列,基站之間的序列是相互正交的。在用戶設備側,已知每個基站發(fā)來的序列,通過將不同的序列與收到的信號進行滑動相關,得到相關序列。由于不同基站發(fā)來的序列的正交性,尋找到的相關序列的首徑即可認為是估計到的到達時延值。TDOA定義為第n個基站的到達時間與第1個基站的到達時間的差值。因此,對于第n個基站的TDOA可表示為:

其中,c是光速,Q表示整數(shù)化。由于存在多個基站,每個基站的時鐘之間不一定對齊,基站時鐘與用戶設備的時鐘也不一定對齊,因此通過滑動相關測得的時延會受基站和用戶設備之間時鐘不對齊的影響而帶來同步誤差。LTE中,對于該同步誤差定義的模型為一個截斷的高斯分布,表示為該誤差不超過±2σTDOA。所以,TDOA的測量值最終可表示為:

其中,dn是實際的TDOA值,en是TDOA測量誤差。由式(2)可知,TDOA的誤差來源于兩部分,一部分是整數(shù)化后的精度誤差,另一部分是同步誤差。精度誤差是由信號的幀結構和帶寬造成的,可使用大帶寬傳輸來減小此誤差,而同步誤差目前較難克服。
DOA的測量準確性主要取決于天線數(shù)目。用戶設備端的天線數(shù)目不夠多,因此主要在上行進行DOA的測量。用戶設備向基站發(fā)送上行參考信號,基站收到多個天線的接收信號,估計多個天線的信道系數(shù)后,通過角度估計算法計算直射徑的波達角。角度定位算法包括DFT算法、MUSIC算法及ESPIRIT算法等[12-14]。實際場景中,DFT算法計算復雜度較小,在低信噪比的情況下魯棒性更強;MUSIC算法要求做子空間的SVD分解,在天線較多的情況下計算相對復雜。因此,選擇使用DFT算法計算角度。同樣,角度的測量也受天線數(shù)量、接收信號的強度、信道的質(zhì)量及角度估計算法的可靠性等影響。由于在標準中未對角度的誤差進行建模,需使用一個高斯分布的誤差來表示角度估計的誤差,角度的測量可表示為:

其中,θ是實際的DOA值,eθ是TDOA測量誤差,且服從零均值的高斯分布
直射徑信道下,已知位置x,距離測量的條件概率函數(shù)(Conditional Probability Density Function,PDF)可表示為:

其中,dn(x)表示第n個基站到用戶設備x的實際距離。x的最大似然估計就是使條件概率最大化的對應x,可表示為:

最大似然估計是可以達到克拉美羅界的最優(yōu)算法,但是利用該算法找到位置的計算復雜度也較高。非線性最小二乘法可權衡定位準確性和計算復雜度。代價函數(shù)表示為:

需注意,當所有距離誤差是獨立同分布的高斯分布時,最小化式(6)的非線性最小二乘法法和最大似然估計式(5)是等效的。
2 多用戶粒子群定位
在PSO算法起始階段,分配一群粒子,每個粒子分配一個隨機的位置。每個粒子計算各自的適應度函數(shù),并基于適應度函數(shù)計算出pbest和gbest用于更新粒子的位置和移動速度。pbest是各個單獨粒子時間上的最優(yōu)位置,而gbest是當前時間整個群的最優(yōu)位置。每個獨立粒子i由三部分組成:二維搜索空間內(nèi)的位置x、該粒子本身能找到的最優(yōu)位置p1k及粒子的移動速度v1k。粒子的位置在初始階段隨機分布在搜索空間內(nèi),粒子的初始速度也是隨機生成。基于每次的位置和移動速度的更新,粒子在搜索空間內(nèi)每次同時移動,經(jīng)過一些更新,最終所有粒子匯聚到同一位置,得到需要求得的位置。位置和速度的更新算法可參考文獻[9]。由于每個粒子并行更新,因此計算復雜度不高。
2.1 單用戶PSO
PSO算法中,用適應度函數(shù)f(x1k)更新粒子群的位置,通過搜尋粒子群中最大或者最小適應度函數(shù)來進行更新。單用戶定位中,如果只考慮距離的測量,那么適應度函數(shù)就等效于式(6)的代價函數(shù)。考慮單用戶使用多種測量值定位時,除不同基站的TDOA測量,還需考慮用戶設備相對于服務基站的DOA測量。由于TDOA測量和DOA測量是相互獨立的測量,所以可以相加。使用式(1)和式(2)的測量模型,多測量值的代價函數(shù)可表示為:

其中,ωDOA∈[0,1]作為一個權值,用來衡量不同測量值貢獻于最終定位結果的權重;fTDOA(x)已由式(6)給出。基于高斯分布的角度誤差模型,DOA測量量的代價函數(shù)為:

2.2 多用戶PSO
多用戶情況下,以用戶為整組來考慮代價函數(shù)的生成。在每一個用戶設備都有一個代價函數(shù)的基礎上,假設組里有M個用戶設備,而又由于每個用戶設備的測量都是互相獨立的,那么整組的代價函數(shù)在只考慮TDOA測量和DOA測量的情況下表示為:

其中,fhybrid(x)跟隨式(7),xm表示第m個用戶設備的二維坐標。在網(wǎng)絡中,如果各個用戶設備之間可通過雷達傳感等信號獲取距離信息,有助于進一步增強定位的準確性。用U2U測量表示用戶與用戶之間的距離信息,該測量模型也可表示為:

其中,lm,m'是第m個用戶設備與第m'個用戶設備之間的真實距離。em,m'是估計誤差,假設該估計誤差服從獨立同分布的高斯分布需注意,位置的表示雙向一致性,即基于該U2U測量模型,相應的代價函數(shù)為:

由于TDOA測量、DOA測量及U2U測量是相互獨立的,兩個代價函數(shù)可直接相加,得到基于整個用戶組的整體代價函數(shù)為:

利用式(12)進行定位時,可能會出現(xiàn)局部最小值而造成誤判,尤其在U2U的誤差方差值較小時會出現(xiàn)誤判現(xiàn)象。因此,需采用二步優(yōu)化方法。第一步是基于單用戶的TDOA+DOA的測量得到每個用戶的位置,第二步是基于單用戶定位得到的位置,將每個用戶的搜索空間限制在一個較小的范圍內(nèi),然后再基于式(12)的代價函數(shù)來精細化最后的位置。采用此定位方法,雖然復雜度有部分的增加,但是可有效避免粒子群的搜索不幸落入局部最小值而造成最終結果不準確的情況發(fā)生。
當用戶設備移動時,隨著移動可獲取更多的測量信息,設備本身移動的位置和用戶的不同時間點位置是強相關的,因此可通過濾波的方法來精細化位置信息,比較有名的濾波方法有擴展的卡爾曼濾波器(Extended Kalman Filter,EKF)方法。
3 仿真條件和結果
在3GPP Release 13規(guī)定的室外場景和信道模型下,對多用戶的PSO定位方法進行仿真。該場景包含19個宏站,每個宏站對應3個六邊形的宏小區(qū)。宏站的站間距為500 m。用戶設備隨機分布在57個宏小區(qū)內(nèi),平均每個小區(qū)內(nèi)有6個用戶。信道類型為3D-Uma。其他仿真主要配置如表1所示。為比較天線數(shù)量對DOA測量的影響,接收側的天線數(shù)量分別選擇8條、16條及64條。
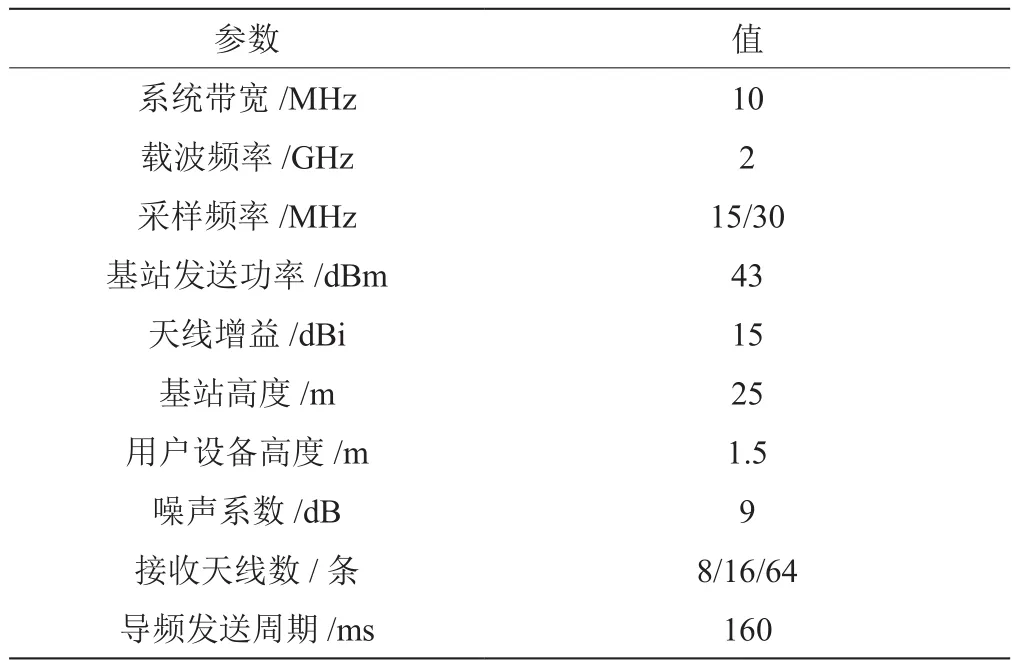
表1 仿真場景
3.1 接收天線數(shù)的影響
對單用戶的PSO算法進行評估。圖1(a)顯示了不同接收天線數(shù)量下的DOA測量誤差的累積分布函數(shù)(Cumulative Distribution Function,CDF)曲線。DOA的誤差隨天線數(shù)的增大而減小。DOA誤差的標準差在天線數(shù)為8條、16條及64條時分別為13°、5°及0.5°。特別是64條天線時,幾乎80%的用戶設備的DOA誤差在0.5°以下,而該情況下的DOA信息對最終位置的估計是最有益的。基于不同天線估計的DOA測量+TDOA測量下進行定位,定位誤差的CDF曲線如圖1(b)所示。天線數(shù)越多,定位精度越準。天線數(shù)為8條和16條時,定位精度相差不大。由于在此情況下角度估計還不準確,因此主要依靠TDOA測量實現(xiàn)準確定位。當DOA的精度達到0.5°以下時,對定位精度的提升非常明顯。
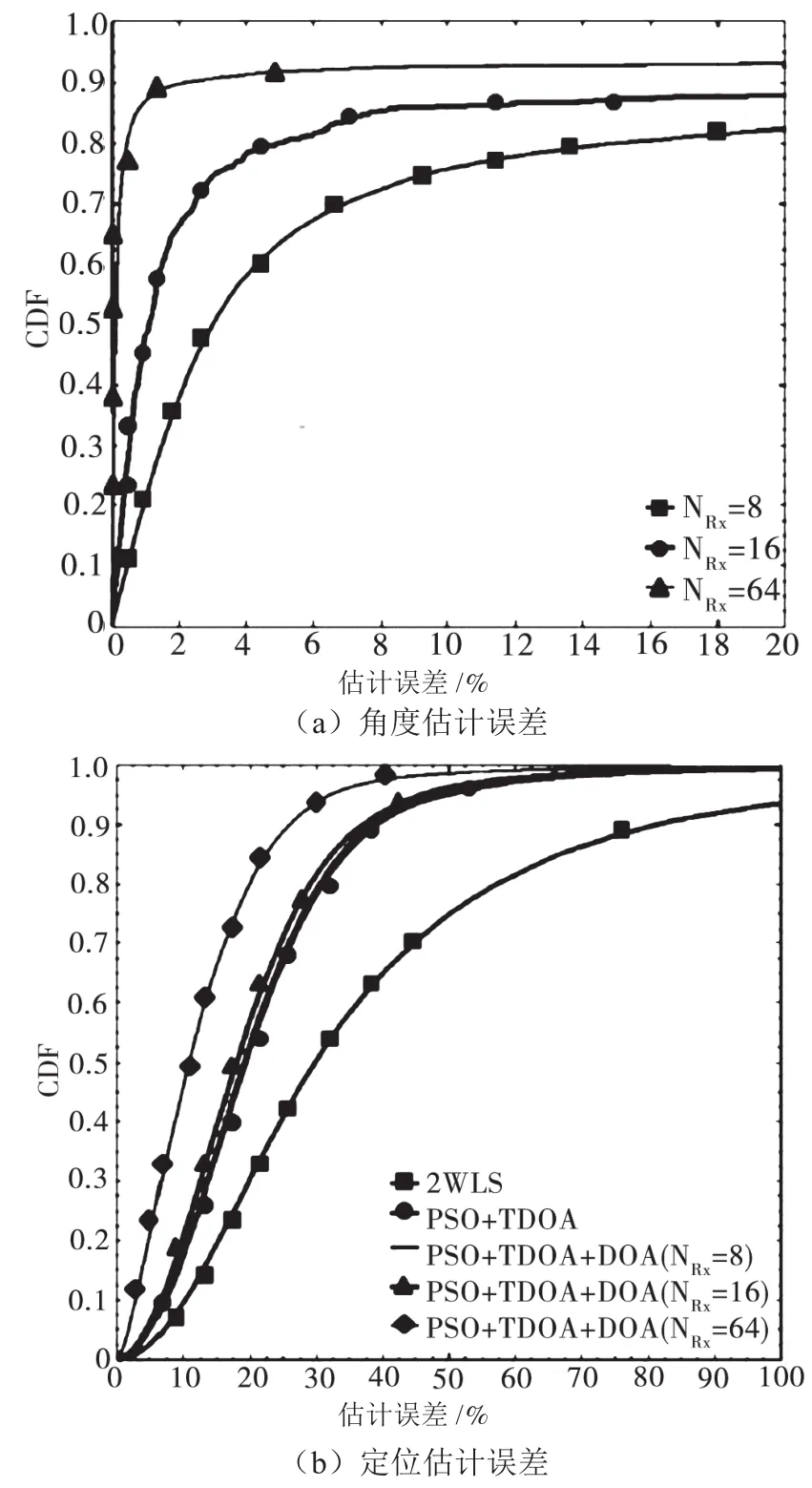
圖1 不同接收天線數(shù)下的角度和定位估計精度性能分析
3.2 多用戶定位評估
多用戶定位仿真中,考慮理想同步和非理想同步兩種情況。非理想同步時,參考3GPP的規(guī)定,使用了標準差為T1=50 ns的誤差模型。非理想同步情況下,TDOA測量的標準差為17.5 m左右。使用64天線時,DOA的標準差為0.5°左右。將網(wǎng)絡內(nèi)距離較近的2~4個用戶設備設為一組,并假設U2U測量的標準差為1 m。由于還要使用EKF進行濾波,假設每個用戶設備是以0~5 m/s的速度進行移動。將OTDOA中用的2WLS算法作為比較基線。由圖2可知,CDF=0.5時,PSO+TDOA+DOA+U2U的定位精度為10.8 m,大約是基線的1/3。使用EKF后,定位誤差能繼續(xù)提升1倍。圖3是理想同步情況下的性能分析,主要定位精度結果如表2所示。由表2中可知,融合所有測量后,最高定位精度可達到1.3 m,接近分米級的定位精度。
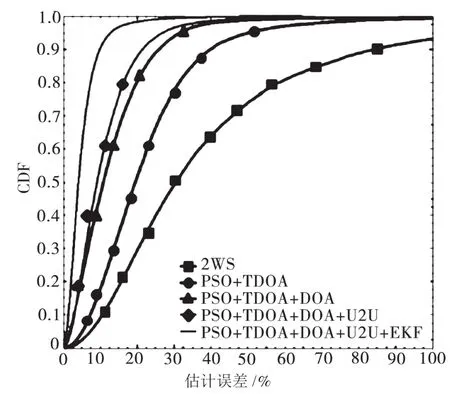
圖2 非理想同步情況下多用戶定位性能比較

圖3 理想同步情況下多用戶定位性能比較

表2 CDF=0.5時各定位精度
4 結 論
本文研究了一種基于PSO的多用戶的定位方法。由于單一的定位測量已無法滿足5G的高精度定位需求,TDOA的測量受限于同步誤差,DOA的測量雖然不受同步誤差的影響,但需較多天線才能實現(xiàn)較高準確度,U2U的測量能進一步精細化定位,所以融合定位方法成為一種定位思路。通過分析可知,PSO的算法能有效融合多種定位測量量,從而得到1.3 m的定位精度。同時,PSO算法具備的并行化特點也使其易于實現(xiàn)。因此,PSO的算法可成為重要的定位技術方案。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
工業(yè)設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21