關于機械智能制造中單片機的應用分析
2019-05-08 03:16:58鄧毅
中國科技縱橫 2019年6期
鄧毅

摘 要:本文選取ARV328單片機作為核心控制器,開發了基于ARV328的超聲波測距系統。依據系統開發需求,合理選取硬件器件,分別給出了系統硬件和系統軟件設計方案。測試結果表明,本系統可以準確測量設備與作業人員距離,精度達到了98.89%,距離安全判斷準確,通過蜂鳴器發出警報。
關鍵詞:ARV328單片機;超聲波測距;警報
中圖分類號:TP242.2 文獻標識碼:A 文章編號:1671-2064(2019)06-0042-02
近年來,我國變電站工作人員作業安全事故發生頻率越來越高,出現此情況的主要原因為在作業過程中設備與作業人員距離控制不佳,引發多起安全事故。隨著科學技術的不斷發展,開發了距離測量儀器,根據安全作業距離設置安全范圍,超出此范圍,系統自動發出警報[1]。目前,開發距離測試系統測量精度較低,本文將利用超聲波測距技術,選取ARV328單片機作為核心控制器,開發一套基于ARV328的超聲波測距系統。
1 超聲波測距原理
超聲波能量衰減速度較慢,傳輸距離較長,具有較強的抗干擾性,在工業領域中應用較多[2]。例如,管道長度探測、設備位置監控、機器人行走控制等[3]。與激光技術相比,該項技術不僅開發成本較低,而且測量方法簡單,數據計算量較小,是距離探測研究的首要選擇工具。
目前,應用比較多超聲波測距方法有3種方法,即聲波幅值檢測法、相位檢測法、往返時間檢測法[4]。其中,往返時間檢測方法比較簡單,并且測量精度較高。所以,本文選取此方法作為距離檢測法。其測量距離的原理如下:
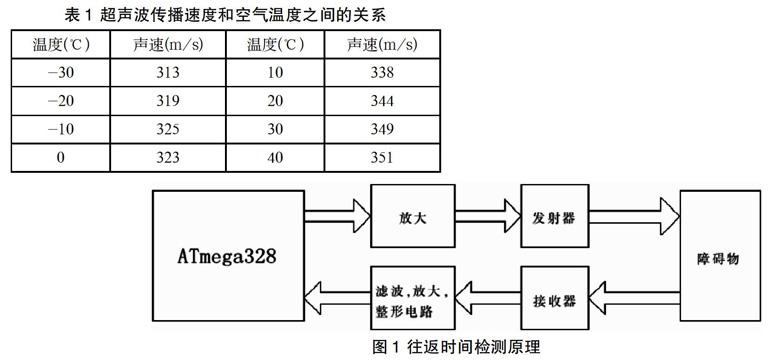
確定超聲波發射方向后,利用超聲波發射器發射超聲波,以發射時間記為發射時刻。在傳播過程中,如果遇到障礙物將立即返回,接收到返回的超聲波停止計時[5]。依據空氣溫度、記錄時間,可以推算當前位置與障礙物之間的距離。其中,超聲波傳播速度和空氣溫度之間的關系如表1所示,往返時間檢測原理如圖1所示。
假設L為障礙物和測量目標之間的距離,記錄時間為t,v為超聲波在空氣介質中的傳播速度,空氣溫度為C,各項參數計算公式如下:
(1)
本文采用超聲波測距方法,測量故障點與目標之間的距離。在ATmega328核心控制器的作用下,驅動超聲波發射器,沿著設定的傳播方向傳播,遇到障礙物后返回,由接收器負責接收超聲波信號,進過濾波、放大、整形處理,得到精度較高的超聲波信號,通過顯示器得以查看。
2 基于ARV328的超聲波測距系統設計
2.1 硬件的選取
本文設計的超聲波測距系統主要由超聲波傳感器、ATmega328微處理器、LCD顯示器、蜂鳴器等硬件設備構成。本文主要對前三種硬件設備的選取進行簡要介紹。
(1)超聲波傳感器的選取。目前,應用比較多的超聲波傳感器有兩種類型,其中一種類型為機械傳播方式傳感器,另外一種類型為電氣傳播方式傳感器。在實際應用中,超聲波傳感器利用能量轉換器,對位于發射端的電能進行轉換處理,生成聲波能。而接收端是將接受到的聲波能經過轉換處理,形成機械能或者電能。本文研究選取壓電式超聲波傳感器發射和接收超聲波信號,通過壓電晶體諧振處理,達到距離檢測目的。
(2)AVR微處理器的選取。AVR處理器從8系列、128系列研發到328系列。與以往研發的AVR系列微處理器相比,AVR328系列微處理性能優勢更大一些。
ATmega328微處理器是一款8位控制器,自身帶有32KB編程FLASH存儲器,運行效率較高[6]。具體特性如下:
功耗較低、性能較高,采用RISC結構打造;支持131條控制命令下達,以單個時鐘周期作為執行時間;8位通用工作寄存器有32個,其工作狀態屬于全靜態;通常情況下工作頻率為20MHz,最高工作頻率可達20MIPS,只需要兩個時鐘周期便可以運行。在外設方面,具有獨立運行的比較器、分頻器;8路10位ADC,支持串行USART;可編程I/O接口有23個,工作電壓范圍:1.8~5.5V;工作溫度范圍-40℃~85℃。
(3)LCD顯示器的選取。為了便于操控,降低功耗,本文選取點陣式LCD顯示器作為系統顯示裝置。該裝置體積較小、功耗低,可以根據開發者需求編寫程序,得到不同顯示方式。該裝置信息顯示方式有很多種,主要包括字符、數字、圖片、圖形等。根據查看需求,觸屏操控或者按鍵操控均可設置。
2.2 系統硬件設計
本系統硬件主要由AVR328單片機最小系統、LCD顯示器、超聲波探測3個模塊構成。
(1)AVR328單片機最小系統。該模塊為系統的核心,用于驅動超聲波傳感器,對傳感器采集到的信號進行處理,通過信號判斷,下達蜂鳴器報警命令。該模塊由78L05穩壓器、JATG仿真接口、EEPROM存儲芯片、RTC溫度傳感器、加速度傳感器、輪速傳感器、蜂鳴器、超聲波發送與接收電路組成。
(2)LCD顯示器。該部分是系統的顯示部分,通過與單片機接口建立連接,實現信號訪問。其中,信號訪問是通過I/O總線直接訪問,為用戶顯示數據信息。
(3)超聲波探測。該模塊由微控制器、超聲波信號發射端、超聲波信號接收端3部分組成。其中,微處理器用來下達超聲波探測裝置運行狀態控制命令;超聲波信號發射端用于產生超聲波,以高壓電源供電;信號接收端由信號采集和信號整理電路組成,主要是對信號進行濾波、放大等處理,從而為預警命令下達提供判斷依據。
2.3 系統軟件開發
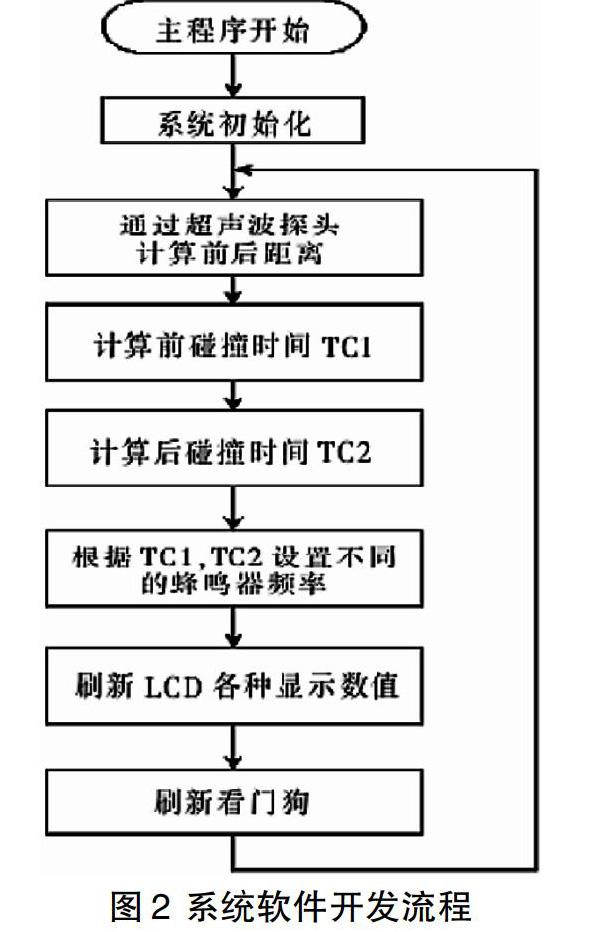
為了避免設備與作業人員距離控制不當造成安全事故,本文在開發系統軟件時,設置超聲波信號發送時間間隔為2s。如圖2所示為系統軟件開發流程。
第一步:系統初始化;
第二步:通過超聲波探頭采集信號,并計算前后距離;
第三步:計算前碰撞時間,記為TC1;
第四步:計算后碰撞時間,記為TC2;
第五步:依據碰撞時間TC1和碰撞時間TC2,設置相應的蜂鳴器頻率;
第六步:刷新LCD顯示數值;
第七步:刷新看門狗。
3 系統測試
本次測試以5米為安全距離,低于5米認為變電站作業人員處于危險環境,如果變電站設備異常就容易傷及作業人員。如表2所示為系統測試結果。
通過觀察表2中的測試結果可知,本系統可以準確測量變電站設備與工作人員距離,精度達到了98.89%,作業距離安全判斷準確,通過蜂鳴器發出警報。
4 結語
本文針對變電站作業安全事故頻繁發生問題,依據超聲波測距原理,設計了一套基于ARV328的超聲波測距系統,該系統由單片機最小系統、LCD顯示器、超聲波探測3個模塊構成。測試結果表明,本系統可以準確測量作業人員與設備之間的距離,支持蜂鳴器警報。
參考文獻
[1] 王瑞澤,程穎,任文平.基于AVR單片機的家庭智能監控機器人設計[J].計算機應用,2016,36(s2):328-330.
[2] 楊東春,趙春慧,顧冬晴.基于激光測距和慣導的非合作目標遠程交會相對導航算法研究[J].上海航天,2016,33(4):75-80.
[3] 張志剛,孫立才,汪沛.基于激光掃描技術的行人檢測方法研究[J].計算機科學,2016,43(7):328-330.
[4] 倪建華.AVR單片機的全方位雷達輔助行車系統設計[J].單片機與嵌入式系統應用,2017,17(4):69-72.
[5] 韓寶玲,劉廣新羅慶生,等.基于AVR和STM32的仿生六足機器人控制系統[J].計算機系統應用,2016,25(6):59-63.
[6] 陳云生,李彤,呂軍,等.基于AVR單片機的高精度距離測量技術研究與實現[J].信息通信,2016(5):101-102.