改進(jìn)多目標(biāo)蟻群算法在動(dòng)態(tài)路徑優(yōu)化中的應(yīng)用
2019-05-16 08:31:40吳耕銳郭三學(xué)吳虎勝
計(jì)算機(jī)應(yīng)用與軟件 2019年5期
關(guān)鍵詞:優(yōu)化
吳耕銳 郭三學(xué) 吳虎勝 薄 鳥
1(武警工程大學(xué)裝備管理與保障學(xué)院 陜西 西安 710086)2(武警警官學(xué)院基礎(chǔ)部 四川 成都 610213)3(武警警官學(xué)院信息通信系 四川 成都 610213)
0 引 言
隨著科技發(fā)展,城市交通向集成化、智能化、網(wǎng)絡(luò)化不斷發(fā)展,車輛、設(shè)備、網(wǎng)絡(luò)形成了一個(gè)共同體,為研究車輛運(yùn)輸路徑提供海量動(dòng)態(tài)信息已然成為可能,動(dòng)態(tài)路徑優(yōu)化問題成為了研究熱點(diǎn)。決策者應(yīng)當(dāng)將動(dòng)態(tài)路徑問題看成一個(gè)系統(tǒng)問題,包括數(shù)據(jù)信息采集、數(shù)據(jù)傳輸和路徑優(yōu)化計(jì)算等。
目前動(dòng)態(tài)路徑優(yōu)化的研究較多。如劉波等[1]結(jié)合冷鏈物流特點(diǎn),建立了以配送總成本最小為優(yōu)化目標(biāo)的帶時(shí)間窗冷鏈配送動(dòng)態(tài)車輛路徑優(yōu)化模型,提出了一種自適應(yīng)改進(jìn)人工魚群算法,利于節(jié)約企業(yè)資源和提高客戶滿意度。李治等[2]提出了小波神經(jīng)網(wǎng)絡(luò)的速度預(yù)測模型,針對動(dòng)態(tài)最優(yōu)路徑選擇問題,確定了基于短時(shí)交通預(yù)測的動(dòng)態(tài)路徑求解算法。趙宏偉等[3]針對實(shí)時(shí)環(huán)境下交通特性,提出了實(shí)時(shí)環(huán)境下基于混合的動(dòng)態(tài)路徑優(yōu)化算法,將剪枝算法和自適應(yīng)A算法結(jié)合,并引入粒子群優(yōu)化,更好適應(yīng)了實(shí)時(shí)環(huán)境求解。
蟻群算法求解路徑優(yōu)化的研究也較多。如陳希瓊等[4]建立了同時(shí)考慮車輛容量和距離約束的雙目標(biāo)模型,用蟻群算法求解多個(gè)目標(biāo),實(shí)現(xiàn)了運(yùn)輸成本和路徑間最大長度差最小化的目的。徐少甫等[5]綜合考慮運(yùn)輸風(fēng)險(xiǎn)和運(yùn)輸時(shí)間目標(biāo),通過ACO算法尋優(yōu),實(shí)現(xiàn)了對危險(xiǎn)化學(xué)品的運(yùn)輸路徑優(yōu)化求解。孫沁等[6]采用2-opt算法擴(kuò)大搜索范圍,克服了蟻群算法缺陷,將其應(yīng)用于電子商務(wù)配送路徑優(yōu)化中,達(dá)到了配送成本最低目標(biāo)。開吉等[7]為解決配送效率低的問題,以淮海經(jīng)濟(jì)區(qū)為實(shí)例,建立了蟻群算法模型,降低了物流配送成本,提高了服務(wù)質(zhì)量。
也有將智能優(yōu)化算法用于動(dòng)態(tài)路徑優(yōu)化的相關(guān)研究。如趙峰等[8]提出了一種新型自適應(yīng)搜索半徑的蟻群路徑優(yōu)化算法,能根據(jù)障礙分布自動(dòng)選擇搜索半徑,完成路徑動(dòng)態(tài)規(guī)劃,其環(huán)境適應(yīng)能力和路徑優(yōu)化性能優(yōu)。文獻(xiàn)[9]應(yīng)用蟻群算法來優(yōu)化車輛路徑,將蟻群算法與基于聚類算法相結(jié)合,進(jìn)一步提高優(yōu)化結(jié)果。文獻(xiàn)[10]通過多處修改遺傳算法后,將算法用于求解動(dòng)態(tài)路徑問題,求解優(yōu)于之前很多同類求解動(dòng)態(tài)路徑優(yōu)化算法。文獻(xiàn)[11]設(shè)計(jì)一種基于蟻群優(yōu)化和動(dòng)態(tài)平臺(tái)點(diǎn)播的優(yōu)化算法,該算法在路徑構(gòu)建時(shí)能有效反應(yīng)車輛行駛環(huán)境的變化。文獻(xiàn)[12]求解與車輛隱私位置相關(guān)的動(dòng)態(tài)路徑問題,對車輛增加情況進(jìn)行集約計(jì)算,可以有效避免任何類型的交通擁堵。
以上研究動(dòng)態(tài)路徑優(yōu)化的過程中尚沒有考慮實(shí)時(shí)動(dòng)態(tài)路徑道路因素對路徑優(yōu)化的影響問題,使得路徑優(yōu)化結(jié)果的客觀性、針對性沒有與實(shí)際路徑情況緊密結(jié)合,優(yōu)化得到路徑的準(zhǔn)確性、實(shí)用性仍需改進(jìn)。且在動(dòng)態(tài)路徑優(yōu)化后,對于車輛旅行時(shí)間窗硬要求方面,只是給出優(yōu)化路徑,沒能給出最短抵達(dá)目的地時(shí)間路徑,一方面影響了服務(wù)質(zhì)量的時(shí)效,另一方面也增大了燃料油耗,沒能很好地解決運(yùn)輸時(shí)間硬要求和資源節(jié)約問題。
本文用多目標(biāo)蟻群算法求解動(dòng)態(tài)車輛路徑問題。在考慮車輛行程約束條件下,以動(dòng)態(tài)路徑優(yōu)化為對象,設(shè)計(jì)了改進(jìn)的多目標(biāo)蟻群算法,在螞蟻尋徑過程中添加了貪婪搜索規(guī)則和禁忌表,加快了搜索速度,進(jìn)行多目標(biāo)局部搜索,改進(jìn)螞蟻生成的解集,防止陷入局部最優(yōu)或遺漏一些帕累托解。與傳統(tǒng)蟻群算法和多目標(biāo)粒子群算法求解相同動(dòng)態(tài)路徑問題的解進(jìn)行比較,與三種最新優(yōu)化算法(改進(jìn)灰狼優(yōu)化算法、改進(jìn)細(xì)菌菌落優(yōu)化算法和鼠疫傳染病優(yōu)化算法)在不同條件下求解動(dòng)態(tài)路徑問題的旅行時(shí)間上進(jìn)行對比,更全面分析改進(jìn)多目標(biāo)蟻群算法的求解性能,更細(xì)致掌握改進(jìn)多目標(biāo)蟻群算法的優(yōu)劣。將動(dòng)態(tài)路徑道路因素適應(yīng)度函數(shù)引入目標(biāo)函數(shù)當(dāng)中,較好地解決了動(dòng)態(tài)路徑優(yōu)化求解中優(yōu)化路徑與實(shí)際道路情況結(jié)合不緊密的問題,使優(yōu)化路徑實(shí)用性增強(qiáng),同時(shí)解決了優(yōu)化路徑旅行時(shí)間縮短的進(jìn)一步要求,一方面提高了運(yùn)輸服務(wù)的時(shí)間質(zhì)量,另一方面也節(jié)約了油料資源,較好地實(shí)現(xiàn)了運(yùn)輸時(shí)間硬要求和資源節(jié)約目標(biāo)。
1 影響動(dòng)態(tài)路徑的道路因素
車輛在行駛中能采集不同道路信息,其中不同道路因素對動(dòng)態(tài)路徑優(yōu)化問題會(huì)產(chǎn)生不同影響,從道路通行能力影響因素角度考慮,選擇了下面三種道路影響因素。
道路質(zhì)量A:道路質(zhì)量取決于不同因素,如坑洞、車道數(shù)等,將此作為一個(gè)重要矩陣,用于計(jì)算路徑優(yōu)化問題。
道路長度B:多重長度在兩個(gè)道路連接點(diǎn)間是同時(shí)存在的。選擇道路時(shí)不僅要考慮道路質(zhì)量最高,還要考慮路徑最短。
道路擁堵C:有些道路比其他道路要擁堵。因?yàn)樽顑?yōu)路徑的形式可能多樣化,有時(shí)長但不擁堵的路徑會(huì)比短而擁堵的路徑更好,因此道路擁堵情況也需要重點(diǎn)考慮。
這里定義一個(gè)數(shù)組
(1)
式中:n是度量數(shù),Cixy定義為從節(jié)點(diǎn)x到節(jié)點(diǎn)y的道路要素的第i個(gè)矩陣值。當(dāng)函數(shù)D值越小,則道路通行能力越大,路徑越優(yōu);相反,函數(shù)D值越大,則道路通行能力越弱,路徑越差。
2 改進(jìn)的多目標(biāo)蟻群優(yōu)化算法
2.1 改進(jìn)算法步驟
構(gòu)造一種具有貪婪轉(zhuǎn)移準(zhǔn)則的多目標(biāo)蟻群算法MT-ACO,對產(chǎn)生的解進(jìn)行多目標(biāo)迭代搜索,進(jìn)一步優(yōu)化替換帕累托解集和目標(biāo)函數(shù)值。具體步驟如算法1所示。
算法1MT-ACO
初始化信息素矩陣T;
令全局帕累托解集Q為空集φ;
令目標(biāo)函數(shù)值矩陣F1=[-∞,+∞];
當(dāng)?shù)螖?shù)IT≠max_IT進(jìn)行循環(huán)1:
令QIT為空集φ;
令FIT=[∞,∞];
令x=1 ton,進(jìn)行循環(huán)2:每只螞蟻依次尋覓其路徑,n為螞蟻數(shù);
采用貪婪搜索辦法尋覓路徑Aij(詳見2.2節(jié));
對路徑Aij進(jìn)一步進(jìn)行多目標(biāo)迭代搜索優(yōu)化,生成新解Qo;(詳見第2.3節(jié))
更新局部信息素(I,Qo);
如果FQo>FIT,則FIT=FQo,QIT=Qo;
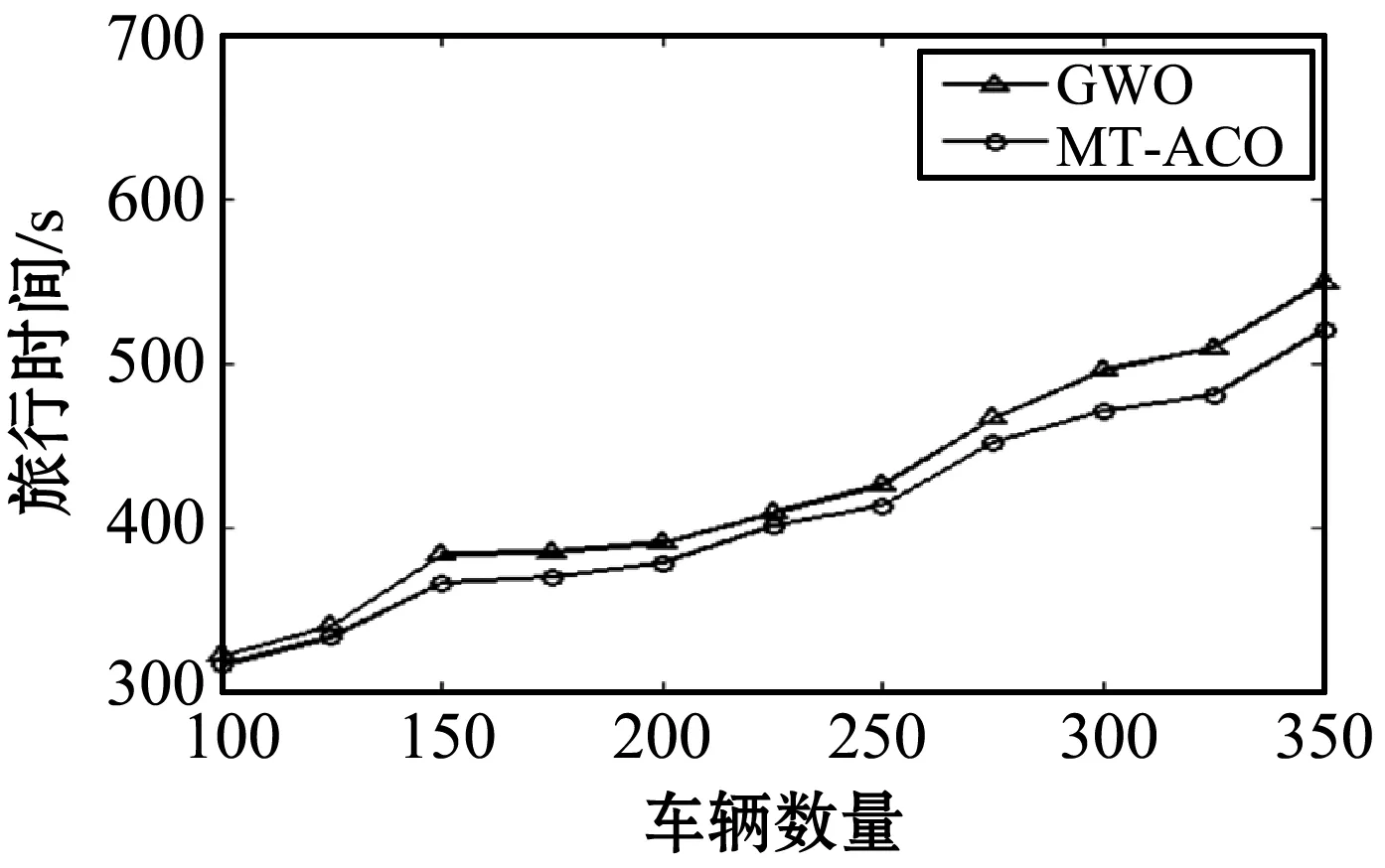
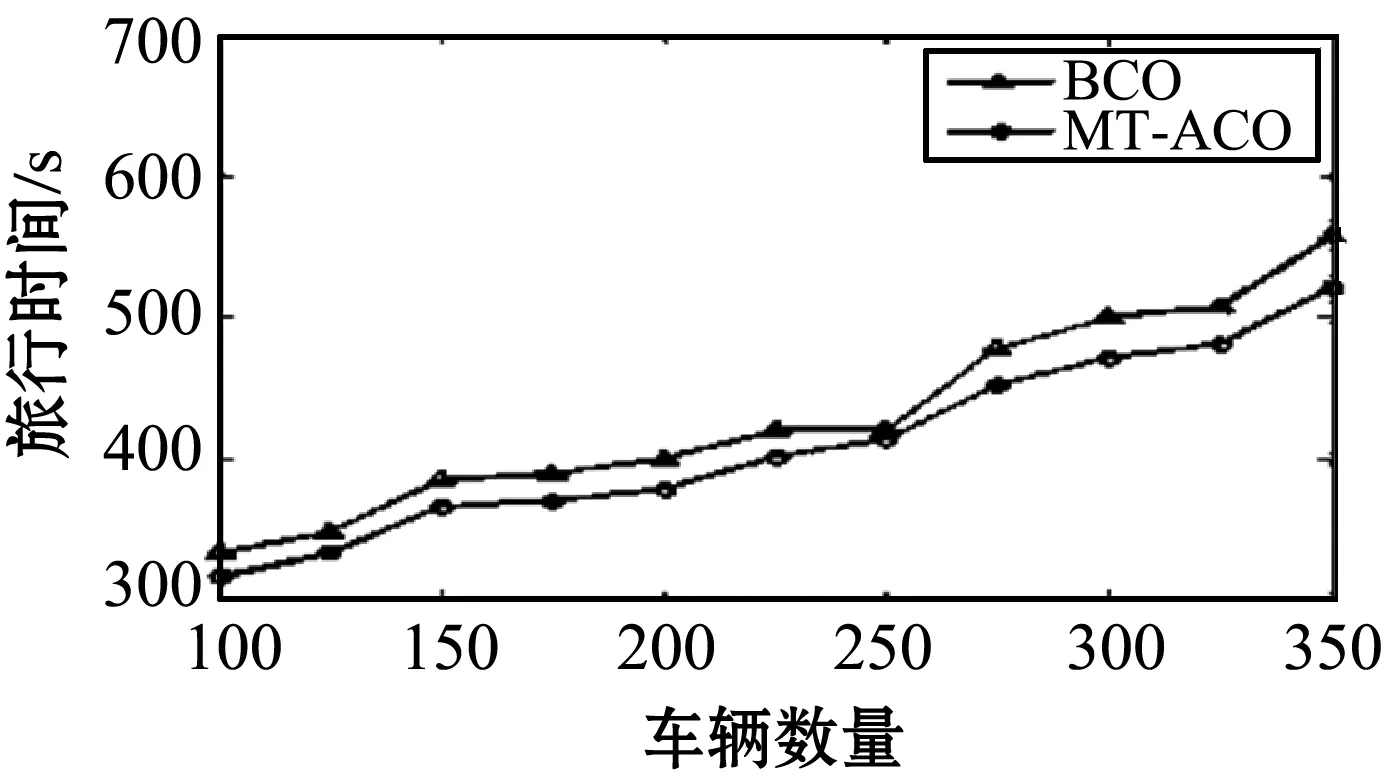
如果FQo 令FIT=(FIT,FQo),擴(kuò)充函數(shù)值矩陣; 令QIT=QIT∪Qo; 循環(huán)2結(jié)束; 更新全局信息素(I,Q,QIT);(詳見第2.4節(jié)) 循環(huán)1結(jié)束; 返回Q、F1兩個(gè)值。 迭代過程中,螞蟻在走過的路徑上會(huì)留下信息素。假設(shè)信息素初始濃度為Tij0=1/Dij,令Tijk代表第k次迭代中弧(i,j)的信息素濃度,螞蟻x在運(yùn)動(dòng)中根據(jù)路徑信息素濃度和效用函數(shù)(φij)α(φij)β選擇下一步前往的節(jié)點(diǎn),當(dāng)螞蟻x在節(jié)點(diǎn)i時(shí),通過式(6)式(7)的尋徑原則轉(zhuǎn)移到節(jié)點(diǎn)j,Pxij表示螞蟻x由節(jié)點(diǎn)i轉(zhuǎn)移到節(jié)點(diǎn)j的概率。其中B1為均勻分布在[0,1]上的隨機(jī)數(shù),B1值可預(yù)先設(shè)定。當(dāng)B≤B1時(shí),螞蟻轉(zhuǎn)移到使效用函數(shù)Tijk(φij)α(φij)β值最大的節(jié)點(diǎn)j,否則按式(8)進(jìn)行選擇轉(zhuǎn)移到節(jié)點(diǎn)j,B1越大說明螞蟻貪婪概率越大,Cxik表示螞蟻x在第k次迭代中達(dá)到節(jié)點(diǎn)i時(shí)未訪問節(jié)點(diǎn)的集合。 (2) (3) (4) (5) 式中:φij為節(jié)點(diǎn)i和節(jié)點(diǎn)j在同一條路徑與不同路徑距離的差值與節(jié)點(diǎn)i和節(jié)點(diǎn)j間距離的比值,φij為節(jié)點(diǎn)i和節(jié)點(diǎn)j在同一路徑上額外需要的載重容量的倒數(shù)。φij、φij和尋徑規(guī)則體現(xiàn)了螞蟻服務(wù)需求差最小客戶時(shí),偏好距離最短的貪婪性。參數(shù)α和β代表φij和φij對轉(zhuǎn)移概率的影響因子。每只螞蟻從中心節(jié)點(diǎn)出發(fā),根據(jù)式(2)-式(3)選擇下一個(gè)節(jié)點(diǎn),生成路徑,當(dāng)Cxik=φ時(shí),螞蟻返回中心節(jié)點(diǎn),并再次從中心節(jié)點(diǎn)出發(fā),開始新的尋徑,直到所有節(jié)點(diǎn)都被訪問過。 螞蟻尋徑過程中,按尋徑規(guī)則轉(zhuǎn)移到下一個(gè)節(jié)點(diǎn),到達(dá)該節(jié)點(diǎn)后,對其載重容量和距離約束進(jìn)行判斷,如果達(dá)到最大行駛距離,則螞蟻回到中心節(jié)點(diǎn);如果超出載重容量,則將該節(jié)點(diǎn)從未訪問的節(jié)點(diǎn)中刪除,在未訪問節(jié)點(diǎn)集合中重新搜索下一個(gè)節(jié)點(diǎn),直到找到能訪問的節(jié)點(diǎn),或者所有未訪問點(diǎn)均被禁忌則回到中心節(jié)點(diǎn)。 螞蟻尋徑過程如算法2所示。 算法2 螞蟻尋徑過程 初始化:中心節(jié)點(diǎn)A0=1,路徑R=[Ai],Ai為當(dāng)前節(jié)點(diǎn),未訪問節(jié)點(diǎn)U,每條路徑長度RD,禁忌表tabu=?; 當(dāng)U=?時(shí),進(jìn)行循環(huán): 按尋徑準(zhǔn)則選擇下一個(gè)節(jié)點(diǎn)N; 令當(dāng)前巡回長度tD=0,Ra=[R,N]; 令Ra中最后一次到達(dá)中心節(jié)點(diǎn)后訪問的節(jié)點(diǎn)為當(dāng)前巡回Y; 計(jì)算Y連接弧上的車輛載重量Zc和當(dāng)前巡回長度tD; 如果(1)max(L)≤Z,即容量未超出; 如果(2)tD+D(N,1)≤L,即從下一點(diǎn)回中心節(jié)點(diǎn)的距離沒有超出距離約束; 則R=Ra;Ai=N;U=(U,N)∪tabu; tabu=[];即釋放禁忌表; 否則,距離超出,則在訪問節(jié)點(diǎn)N前返回中心節(jié)點(diǎn); 螞蟻回到中心節(jié)點(diǎn),生成巡回路徑(R,tD,RD)=[RD,tD]; 開始新的巡回,令新巡回長度tD=0,Ai=1; 如果(2)結(jié)束; 否則,容量超出時(shí),將下一個(gè)節(jié)點(diǎn)N添加到當(dāng)前節(jié)點(diǎn)Ai不能訪問的禁忌表中; tabu=[tabu,N]; U=U/N; 如果(3)U=?且tabu=?,當(dāng)前節(jié)點(diǎn)到未訪問節(jié)點(diǎn)間均超出容量; 螞蟻回到中心節(jié)點(diǎn),記錄生成的路徑信息(R,tD,RD)=[RD,tD]; 開始新的巡回,令新巡回長度tD=0,Ai=1; U=tabu,tabu=[],釋放被禁忌的節(jié)點(diǎn); 如果(3)結(jié)束; 如果(1)結(jié)束; 大循環(huán)結(jié)束; 記錄完成路徑Rw,并根據(jù)RD計(jì)算目標(biāo)函數(shù)。 螞蟻找到一條路徑后,采用局部搜索法來進(jìn)一步優(yōu)化路徑。這里采用兩種Swap交換法:交換一條路徑上任意兩個(gè)節(jié)點(diǎn),交換兩條不同路徑上任意兩個(gè)節(jié)點(diǎn)。因?yàn)楣?jié)點(diǎn)需求不同,交換節(jié)點(diǎn)后就可能出現(xiàn)不可行解或者原解更優(yōu)的情況,因此進(jìn)行交換后,需要對新生成路徑進(jìn)行驗(yàn)證,如果該解更優(yōu),則擇優(yōu)保留,如果生成新的帕累托解,則生成新的解集K。 螞蟻在找到一個(gè)解后,按下式更新路徑上的信息素濃度: (6) 式中:ρ為信息素?fù)]發(fā)程度,Q為信息素強(qiáng)度,Lgb為當(dāng)前最優(yōu)解,取Q為100。 每次迭代完成,從所有螞蟻找到的解中,將所有帕累托解作為迭代最優(yōu)帕累托解集,將迭代最優(yōu)帕累托解集與全局最優(yōu)帕累托解集進(jìn)行對比,保留并更新最優(yōu)帕累托解集。 目標(biāo)函數(shù)設(shè)定為: S=S1+S2 實(shí)驗(yàn)配置是由兩個(gè)開源軟件NS2和SUMO共同組成。應(yīng)用兩個(gè)時(shí)間窗,長時(shí)間窗tl和短時(shí)間窗ts,分別為120 s和60 s。在每個(gè)短時(shí)間間隔后對數(shù)據(jù)進(jìn)行初始化,在每個(gè)長時(shí)間間隔后進(jìn)行路徑優(yōu)化計(jì)算。所以,任何路徑重構(gòu)都是在長時(shí)間間隔后才完成的。實(shí)驗(yàn)初始化流程如圖1所示,相關(guān)實(shí)驗(yàn)參數(shù)如表1所示。 圖1 實(shí)驗(yàn)初始化流程圖 參數(shù)參數(shù)值技術(shù)IEEE80211.P頻帶15 MHz~2.7 GHz衰變對數(shù)距離能量大小10 dBm長時(shí)間窗tl120 s短時(shí)間窗ts60 sTSD、TSM大小100字節(jié)仿真周期3 600 s 地點(diǎn)選擇了西安市市中心,應(yīng)用ArcGIS10.3軟件生成道路網(wǎng)絡(luò)圖,如圖2、圖3所示。每條邊與包含道路元素的節(jié)點(diǎn)的端點(diǎn)相對應(yīng),主要考慮以市中心鐘樓為圓點(diǎn),半徑3~5 km范圍內(nèi)500組不同目標(biāo)點(diǎn)道路的行駛,車速為40~60 km/h,車輛載重為5 t,車型為普通卡車。 圖2 西安市道路網(wǎng)絡(luò)圖 圖3 局部道路詳圖 仿真中可知,在求解動(dòng)態(tài)路徑優(yōu)化問題時(shí),多目標(biāo)粒子群算法求解結(jié)果優(yōu)于蟻群算法,改進(jìn)的多目標(biāo)蟻群算法求得的解優(yōu)于多目標(biāo)粒子群算法,其車輛平均旅行時(shí)間更短。在時(shí)間窗要求下隨機(jī)選擇路徑就可能造成交通擁堵。然而,當(dāng)?shù)缆窊矶驴梢杂靡恍┨厥獾牡缆芬蛩貋砉烙?jì)時(shí),就可以用特定算法來估計(jì)動(dòng)態(tài)路徑,為決策者提供一條更優(yōu)的路徑。在優(yōu)化過的路徑上行駛,車輛能更好地避免道路擁堵,更早抵達(dá)目的地。 不同迭代次數(shù)后蟻群算法、多目標(biāo)粒子群算法和改進(jìn)的多目標(biāo)蟻群算法優(yōu)化后的旅行時(shí)間對比情況如圖4所示。由圖4可知,蟻群算法的平均旅行時(shí)間最長,基本都在350 s以上,最長在500 s左右,多目標(biāo)粒子群算法則相對短一些,最短在285 s,改進(jìn)的多目標(biāo)蟻群算法平均旅行時(shí)間最短,最長也在400 s以內(nèi),平均旅行時(shí)間比多目標(biāo)粒子群算法短13.2%,比蟻群算法短20%。當(dāng)城市中車輛數(shù)量增加時(shí),平均旅行時(shí)間也將因?yàn)榈缆窊矶潞蛙囁俚淖兓饾u增加,三種算法在不同車輛數(shù)量時(shí)旅行時(shí)間求解情況如圖5所示。蟻群算法在車輛數(shù)量相同時(shí),平均旅行時(shí)間要比多目標(biāo)粒子群算法長9.9%,而改進(jìn)的多目標(biāo)蟻群算法在車輛數(shù)量相同時(shí),平均旅行時(shí)間比多目標(biāo)粒子群算法短11.4%。蟻群算法在優(yōu)化車輛路徑時(shí),收斂比多目標(biāo)粒子群算法要快,改進(jìn)的多目標(biāo)蟻群算法則比蟻群算法收斂得更快些。因此,用改進(jìn)的多目標(biāo)蟻群算法優(yōu)化車輛動(dòng)態(tài)路徑時(shí),會(huì)更快地獲取路徑更新信息,與之前路徑信息形成對比。 圖4 不同迭代次數(shù)條件下三種算法求解的旅行時(shí)間對比 圖5 不同車輛數(shù)量條件下三種算法求解旅行時(shí)間對比 計(jì)算復(fù)雜度對比情況如圖6所示。由圖可知,同樣在3 600 s的仿真周期內(nèi),蟻群算法的求解時(shí)間在2 000 s左右,多目標(biāo)粒子群算法在2 103 s左右,而改進(jìn)的多目標(biāo)蟻群算法在2 187 s左右,也就是在計(jì)算復(fù)雜度上比蟻群算法增加8.9%,比多目標(biāo)粒子群算法增加3.5%,增加幅度較小,且增加量在可接受范圍之內(nèi)。 圖6 三種算法計(jì)算復(fù)雜度對比 與改進(jìn)灰狼優(yōu)化算法[14]、改進(jìn)細(xì)菌菌落優(yōu)化算法[15]和鼠疫傳染病優(yōu)化算法[16]三種最新優(yōu)化算法在不同條件下對動(dòng)態(tài)路徑問題求解旅行時(shí)間進(jìn)行對比,分析本文改進(jìn)優(yōu)化算法優(yōu)劣。 4.2.1與改進(jìn)灰狼優(yōu)化算法(GWO)對比 在相同迭代次數(shù)條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比改進(jìn)灰狼優(yōu)化算法要短3.33%,具體如圖7所示。由圖7可知,兩者最優(yōu)解基本相似,收斂速度上多目標(biāo)蟻群算法要快一些。 圖7 不同迭代次數(shù)條件下求解旅行時(shí)間與GWO優(yōu)化算法對比 在不同車輛數(shù)量條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比改進(jìn)灰狼優(yōu)化算法要短4.82%,具體如圖8所示。由圖8可知,在車輛數(shù)量小于250輛時(shí),改進(jìn)灰狼優(yōu)化算法總體與改進(jìn)多目標(biāo)蟻群算法求解的旅行時(shí)間很接近,尤其當(dāng)車輛數(shù)量在200~250輛之間,求解旅行時(shí)間幾乎差不多,但當(dāng)車輛數(shù)量較大時(shí),多目標(biāo)蟻群算法的優(yōu)勢得到凸顯,比GWO算法求解旅行時(shí)間要短5%以上。 圖8 不同車輛數(shù)量條件下求解旅行時(shí)間與GWO優(yōu)化算法對比 4.2.2與改進(jìn)細(xì)菌菌落優(yōu)化算法(BCO)對比 在相同迭代次數(shù)條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比改進(jìn)細(xì)菌菌落優(yōu)化算法要短5.21%,具體如圖9所示。由圖9可知,多目標(biāo)蟻群算法最優(yōu)解要比BCO算法好一些,但BCO算法收斂速度較快些。 圖9 不同迭代次數(shù)條件下求解旅行時(shí)間與BCO優(yōu)化算法對比 在不同車輛數(shù)量條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比改進(jìn)細(xì)菌菌落優(yōu)化算法要短5.36%,具體如圖10所示。由圖10可知,當(dāng)車輛數(shù)量小于150輛時(shí),BCO算法與改進(jìn)多目標(biāo)蟻群算法在求解旅行時(shí)間上幾乎一致,在車輛數(shù)量達(dá)到中等規(guī)模(150~250輛之間)時(shí),多目標(biāo)蟻群算法的求解旅行時(shí)間相對短的優(yōu)勢就逐漸凸顯,當(dāng)車輛數(shù)量較大時(shí),BCO算法與多目標(biāo)蟻群算法的時(shí)間差距進(jìn)一步增大,旅行時(shí)間要長6%左右。 圖10 不同車輛數(shù)量條件下求解旅行時(shí)間與BCO優(yōu)化算法對比 4.2.3與鼠疫傳染病優(yōu)化算法(PIDO)對比 在相同迭代次數(shù)條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比鼠疫傳染病優(yōu)化算法要短5.63%,具體如圖11所示。由圖11可知,多目標(biāo)蟻群算法求解旅行時(shí)間比PIDO算法要總體短得多,且收斂速度較快。 圖11 不同迭代次數(shù)條件下求解旅行時(shí)間與PIDO優(yōu)化算法對比 在不同車輛數(shù)量條件下,改進(jìn)多目標(biāo)蟻群算法求解的路徑平均旅行時(shí)間比鼠疫傳染病優(yōu)化算法要短6.21%,具體如圖12所示。由圖12可知,總體來說PIDO算法與多目標(biāo)蟻群算法在求解旅行時(shí)間上保持著6%左右的時(shí)間差距,但當(dāng)車輛數(shù)量達(dá)到250輛左右,其求解旅行時(shí)間非常接近。 圖12 不同車輛數(shù)量條件下求解旅行時(shí)間與PIDO優(yōu)化算法對比 改進(jìn)的多目標(biāo)蟻群優(yōu)化算法考慮了行車距離約束,引入了貪婪搜索與禁忌表,應(yīng)用多目標(biāo)搜索改進(jìn)求解收斂。算法與傳統(tǒng)優(yōu)化算法相比,雖然在計(jì)算復(fù)雜度上有小幅度增加,但其求解動(dòng)態(tài)路徑優(yōu)化時(shí),路徑的旅行時(shí)間在同等迭代次數(shù)時(shí)更短,平均有13%的浮動(dòng)差,在同樣車輛數(shù)量條件下旅行時(shí)間也更短,平均短10%。與三種最新優(yōu)化算法(GWO、BCO、PIDO)對比,在不同迭代條件下求解旅行時(shí)間時(shí),雖然收斂速度存在差異,但平均分別縮短了3.33%、5.21%和5.63%。在不同車輛數(shù)量條件下求解旅行時(shí)間時(shí),多目標(biāo)蟻群算法求解的平均旅行時(shí)間要比三種最新優(yōu)化算法分別短4.82%、5.36%和6.21%。說明其生成的路徑更優(yōu),能更好地避免道路擁堵、滿足運(yùn)輸時(shí)間硬要求,實(shí)現(xiàn)燃料節(jié)約,路徑實(shí)用性更強(qiáng)。另外,改進(jìn)的多目標(biāo)蟻群算法的可變性和應(yīng)用性也非常強(qiáng),在其他組合優(yōu)化問題中也可進(jìn)一步探索,是非常值得深入研究的優(yōu)化領(lǐng)域,為未來復(fù)雜環(huán)境下動(dòng)態(tài)路徑問題的研究提供參考。2.2 螞蟻尋徑原則

2.3 多目標(biāo)局部搜索
2.4 信息素濃度更新準(zhǔn)則
2.5 目標(biāo)函數(shù)

3 實(shí)驗(yàn)環(huán)境




4 實(shí)驗(yàn)部分
4.1 算法與傳統(tǒng)優(yōu)化算法對比



4.2 算法與三種最新優(yōu)化算法對比




5 結(jié) 語
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
