iBoat BM1型無人測量船在松花江哈爾濱段淺水區水下地形測量中的應用
2019-05-23 02:43:16史磊
水利科技與經濟 2019年4期
關鍵詞:測量
史 磊
(哈爾濱市水文水資源勘測總站,哈爾濱 150010)
0 引 言
在江河湖泊等水域中,水下地形測量為河道疏浚工程提供基礎數據,在抗洪搶險中可以預判險情的危險程度,同時水下地形測量的數據信息也是智慧城市在水務基礎信息建設方面的重要組成部分。水下地形測量原理是在測量船上實時進行記錄點的位置定位和水深值的數據疊加。測量船上搭載GNSS-RTK與單波束測深儀的組合是當前內河水域應用最為廣泛的水下地形測量技術。GNSS-RTK定位可以實時獲得厘米級的平面和高程數據,配合數據采集、導航、后處理軟件得到相應點的三維坐標,實現水下地形測量的數字化。在過去的較長一段時間,水下地形測量所搭載的水上交通工具,主要以沖鋒舟和小型船只為主, 橡皮艇有時也會采用。這些水上交通工具在多數情況下測量起來是高效且安全的,但在藻類茂盛、地形復雜的小湖泊、池塘和小型水庫等淺水水域進行水下地形勘測工作時,利用上述水上交通工具來完成測區任務就會遇到許多困難。例如水域獨立封閉時,船只無法進入測區,沖鋒舟的螺旋槳很容易被水藻纏繞或是碰撞到水下障礙物導致螺旋槳損壞,同時也給船上工作人員帶來一定安全風險。因此,在淺水水域下能夠得到實時、高效、安全、精準、完整的水下地形數據,是水下勘測工作人員面臨的新課題。
1 iBoat BM1型無人測量船概述
構成智能無人船測量系統的框架體系包括岸基操控部分、GNSS基準站定位解算部分和測深船水上勘測三大部分,其中主要核心系統有船載平臺、船載操控、定位與測深、無線傳輸、岸基控制、智能避障、視頻可視系統等。運用無線電通訊實現岸基控制與測深船之間的交互。岸基操控部分可以通過控制軟件對船體姿態參數進行實時控制,結合水深數據實時顯示地形變化。而GNSS-RTK基站與流動站的通訊,與常規RTK工程測量一致,可選主基站為電臺模式UHF或者CORS網模式。
本次性能試驗選用的iBoat BM1型智能無人測量船,船體尺寸為1.8 m×0.84 m×0.48 m(長×寬×高),靜水吃水深度為0.2 m,遙控距離約為2 km。船速在4節狀態下航行其續航時間可達到6 h左右,續航里程可達30 km;航行平穩,可以抗5級風,3級浪,三體船型設計,船身流線型可以使水流對船體產生的阻力減小。碳纖維材料使整船重量更輕,采用凱夫拉防彈布高強度玻璃鋼材質可以使船體抗碰撞能力更好,尾部螺旋槳和船底齊平設計,適應淺水區域,底部水刀可以防止水草、垃圾殘留物纏繞;可實時多角度視頻傳輸當前測量船視野內的高清圖像;無人船內置的HD-MAX測深模塊量程范圍為0.15~300 m;基站通訊5 km,遙控器2 km,視頻傳輸5 km;超聲波避障。
2 松花江淺水水域實測案例概況及需求分析
本次進行水下地形測量測區選在松花江哈爾濱段中的支流水域,該段水域位于陽明灘大橋東側,屬于水源保護區范圍。水下地形圖的獲得是通過需要的測圖比例尺,按照相應的河道斷面測量要求進行帶狀河道斷面測量而得到水底高程,經過數據后處理得到最終的水下地形圖。本次試驗可能遇到以下幾種困難情況發生:
1) 測區的淺水區淺水處水深不足1 m。
2) 水域周邊及河底淤泥較厚,測區沒有可供測量用的船只。
3) 水下藻類大量繁殖,螺旋槳容易被纏繞。
4) 實測期間處于低水位,江面高度低于過水壩無法將測量船只駛入測區。
根據以上分析,無人測量船能夠較好地克服水深過淺、水草藻類大量繁殖、近岸淤泥較深的惡劣測區環境,且能夠在保障人員安全的情況下獲取到完整的水下高程數據。無人船配備的HD-MAX后處理軟件能夠進行數據修正,從而得到精度較高的水下數據,滿足水下地形測量的規范要求。
3 無人船試航數據采集方法及難點解決
1) 通過實地踏勘以及軟件自帶功能,可以加載測區衛星影像地圖,見圖1。對無人船測量航線進行路線規劃設計。根據實地情況設定測量比例尺為1∶2 000,垂直于河道中心線布設測深線,測深線間距40 m,拐彎處加密斷面,斷面間距為20 m,河道中心線記為測深檢測線,測深定位點間距為10 m。

圖1 iBoat無人船衛星影像地圖
2) 水域條件復雜。地形規整的區段選擇自動航線進行測量,而對障礙物多且貼岸水邊線不規整區段以手動控制無人船行走路線的方式補測完整。見圖2。
3) 岸基架設位置選址。河道多數為帶狀地形,考慮到通訊要求,本次試航基站選在岸邊位置相對較高且距上下游適中的地方,目的是讓岸基通訊裝置接收無人船信號的覆蓋范圍更大,避免重復調整角度,增加搬站時間,從而提高作業效率。
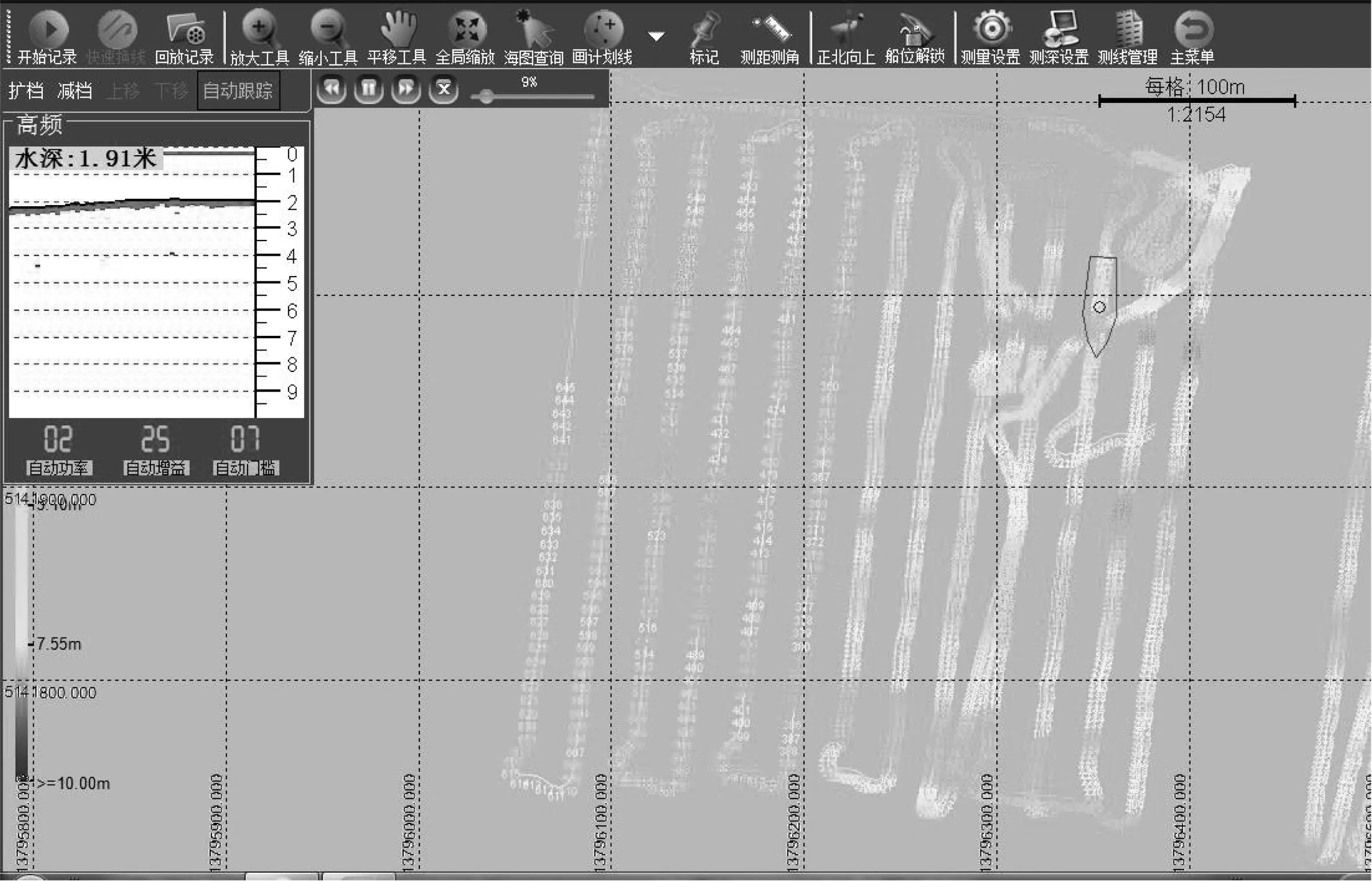
圖2 無人船數據采集自動與手動操控記錄
4) 在測區直道斷面和彎道斷面處各測一個來回,校核水深數據采集是否正確;水面與陸地相接的水涯線采用GNSS-RTK由測量員人工實測采集。
5) 在數據采集時,距岸基較遠和有障礙物遮擋時有數據回傳丟失,不能及時傳回岸基電腦里。通過電腦里的測深數據實時顯示,可將未記錄的點重新進行補測。
在本次淺水水域水下地形測量試驗中,野外數據采集耗時半天,內業數據后處理半天。
測深儀軟件優點:
1) 測深點可進行顏色漸變設置,直觀感受水域地勢深淺變化。
2) 測深點取樣分析,排除非正常值。
3) 內業處理人員可以根據模擬回波信號精確地進行數據改正。圖3中藍色的線是數字信號,紅色帶狀是模擬信號,進行數據處理時,讓兩者進行匹配即可。在按距離采集數據時,遇有陡峭地形通過任意手動加點功能把漏掉的特征點進行處理,使后處理時更加方便地準確反映地貌特征。
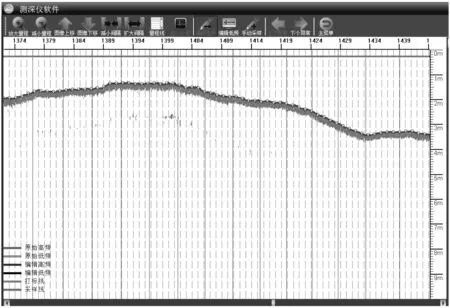
圖3 測深儀軟件進行數據后處理
4) 可通過采集數據后處理軟件進行多項改正。如轉換參數改正、延遲改正、水面高程改正、吃水改正、聲速改正,依次把需要改正的數值輸入軟件。同時,潮位改可以根據當前范圍內測量時間段水位觀測站的水位進行相應處理。
5) 整理完成的數據。根據需要的數據格式,可自定義輸出數據并導出成果,還可在輸出成果時預覽,見圖4。
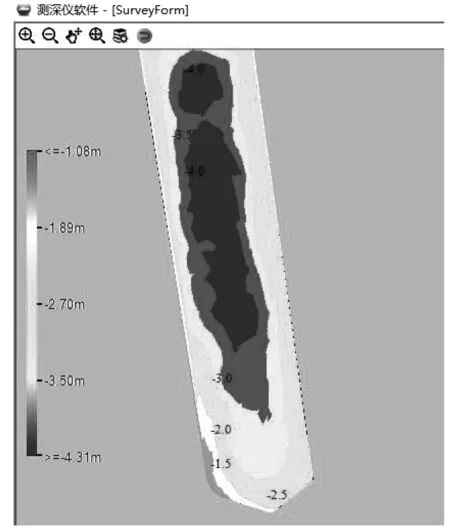
圖4 經過簡單處理的帶狀河道地形預覽
4 結 語
在對松花江陽明灘大橋東側水域進行水下地形測量數據采集時,對于藻類水草叢生、正常船只容易擱淺的測區,采用智能無人船是非常好用的一種測量方式。無人船界面可以整體合理設計測區工作航線,作業時操作靈活,可自由切換手動與自動控制模式,數據采集界面直觀反映地形起伏變化,所采集的數據滿足測量精度要求。
本次試航的中海達iBoat智能無人測量船,其測深部件可拆卸替換。作為一種水上監測平臺,根據任務需要可以搭載如側掃聲吶、水質采樣設備等多種設備,可以靈活地完成多種水上監測任務。
5 建 議
iBoat無人測量船仍有許多功能有待加強并在以下方面提出了幾點建議:
1) 無人船智能控制系統有待提高。在本次河道地形勘測試驗中,仍出現了遇有障礙物沒有及時躲避的情況發生,在障礙物露出水面很小時或障礙物被水淹沒時,人工智能避障系統無法判斷前方是否有障礙物,造成無人船與之發生碰撞。建議水上水下各加裝一個能夠實時監控障礙物的避障裝置,以便為遠距離時水下地形勘測提供安全保障,避免刮碰。
2) 無人船在與岸基進行數據通訊時,由于受岸基接收裝置的覆蓋范圍所限,需要實時調整岸基接收裝置的方向,當無人船不在岸基接收數據范圍內時,岸基軟件應及時提示操作人員數據中斷或給出相應解決辦法,避免漏測的情況發生。
3) 在無人船與船控人員距離較遠時,對船控人員的操作水平要求很高。手動模式下加裝一個可以在遙控器上實時顯示當前無人船位置和視頻畫面的顯示屏,使操控人員能夠清楚監控到無人船的周邊環境。在數據采集中遇到有死角的地方,能夠運用超聲波避障功能將前方障礙物與船體的距離進行實時播報,提高手動遙控的可操作性,更加準確地判斷前方障礙。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
