紅花絲采摘裝置的凸輪機構運動失真研究
2019-05-27 08:44:28焦灝博曹衛彬孫胃嶺李樹峰楊雙平
農機化研究 2019年8期
焦灝博,曹衛彬,孫胃嶺,李樹峰,楊雙平
(石河子大學 機械電氣工程學院,新疆 石河子 832000)
0 引言
2014 年,我國紅花的種植面積超過 5.3 萬 hm2,總產量占世界的80%以上[1],主要用于制藥、食品加工、染料、油料和飼料等[2-3]。紅花絲機械收獲已經成為我國紅花采摘的迫切需求,但現有的紅花絲采摘裝置采摘性能較低,主要表現為紅花絲夾不緊導致漏采率較高,無法滿足紅花田間收獲作業要求。其主要原因在于紅花絲采摘裝置的凸輪驅動機構在工作過程中存在較大沖擊,導致出現運動失真[4-10],安裝在推桿上的動齒與安裝在主軸上的定齒在夾緊紅花絲的過程中受到推桿與凸輪的沖擊,使得動齒與定齒產生振動,導致彈簧施加給紅花絲的夾緊力急劇減少,甚至夾不住紅花絲,出現漏采現象。針對上述問題,建立了推桿在彈簧-凸輪作用下的動力學模型,并采用多項式函數設計凸輪型線。當凸輪型線對推桿的支持力始終小于彈簧對推桿的作用力時,可消除凸輪失真現象。由于凸輪運動失真發生在凸輪的回程段,通過MatLab軟件對凸輪型線與推桿在彈簧作用下動力學模型進行編程,調節凸輪回程角與凸輪回程大小,消除凸輪機構失真現象。調整凸輪型線的參數發現:當凸輪行程大于紅花絲采摘裝置的動齒與定齒的張開間距、凸輪回程角大于動齒與定齒閉合需要的旋轉角時,可以有效減少凸輪機構的失真現象;且當紅花絲采摘裝置的動齒與定齒張開間距為4.5mm、凸輪回程為5.8mm、動齒與定齒閉合需要的旋轉角度為0.1π、凸輪回程角為0.14π時,三次多項式對應的凸輪型線未發生失真現象。
1 紅花絲采摘裝置工作原理與工作要求
紅花絲采摘裝置主要由軸承、機架、彈簧擋板、壓縮彈簧、開口銷、定齒、動齒、推桿、萬向球、端面凸輪、帶滑槽的定齒安裝座、動齒固定板及主軸組成,如圖1所示。其運動過程為:主軸、帶滑槽的定齒固定座、定齒通過螺釘固定在一起;動齒固定在推桿上,并與推桿一起固定;推桿一端與彈簧連接,一端通過萬向球與凸輪連接。主軸旋轉的過程中帶動動齒和定齒一起旋轉,在凸輪與彈簧作用下,推桿帶動動齒與定齒的張合,從而夾緊花絲,在動齒與定齒一起旋轉的過程中拔掉紅花絲。為了方便對紅花絲采摘裝置進行動力學分析,確保采摘裝置采摘性能,對采摘裝置的關鍵部件參數進行測試。其中,動齒的質量為1.50kg,推桿質量為3.25kg,彈簧剛度k=20N/mm,推桿中心到主軸的距離r=25mm。根據測試,推桿與帶滑槽的定齒安裝座之間的摩擦因數μ=0.2,拉拔掉一朵紅花絲的力需25N,凸輪回程角θ0=18°。鋼與紅花絲之間的摩擦因數測試表明,紅花絲與動齒、定齒的摩擦因數為0.5。采摘裝置的轉速不能低于8r/s,為保證較高的采摘效率與采凈率,采摘裝置轉速取10r/s。
為了研究過程簡單化,將紅花絲采摘裝置進行簡化,如圖2所示。圖2中,在彈簧推動作用下,推桿帶動動齒沿著主軸的軸線方向移動,與定齒閉合,夾緊紅花絲;同時,主軸旋轉,帶動定齒和動齒繞著主軸沿著凸輪的型線旋轉,實現紅花絲的拉拔。因此,紅花絲采摘裝置在只有一個驅動的條件下,實現了對紅花絲的夾緊與拉拔動作,且彈簧剛度、凸輪型線、主軸轉速之間的匹配關系影響著采摘裝置的工作性能。為提高紅花采摘裝置采摘紅花絲的性能,需對彈簧剛度、凸輪型線及主軸轉速之間進行動力學分析。
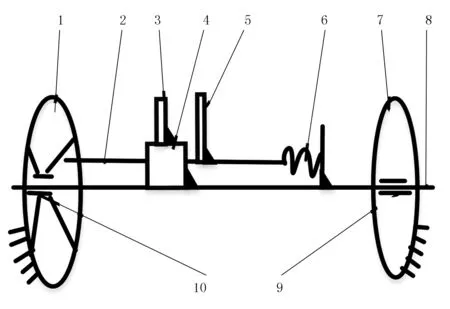
1.凸輪 2.推桿 3.定齒 4.主軸與推桿構成移動副 5.定齒 6.彈簧 7.支座 8.主軸 9.主軸與支座構成轉動副 10.主軸與凸輪構成轉動副
2 夾花過程的推桿運動位移建模
紅花絲的夾緊發生在凸輪的回程段,在彈簧的推動下,推桿在繞著主軸旋轉的過程中沿著軸向移動,帶動采摘紅花絲的動齒移動,與安裝在機架上的定齒閉合夾緊花絲。為了研究方便,將推桿沿著凸輪型線的旋轉運動轉化為沿著凸輪型線移動,因此在凸輪回程段采摘裝置運動過程將轉化,如圖3所示。
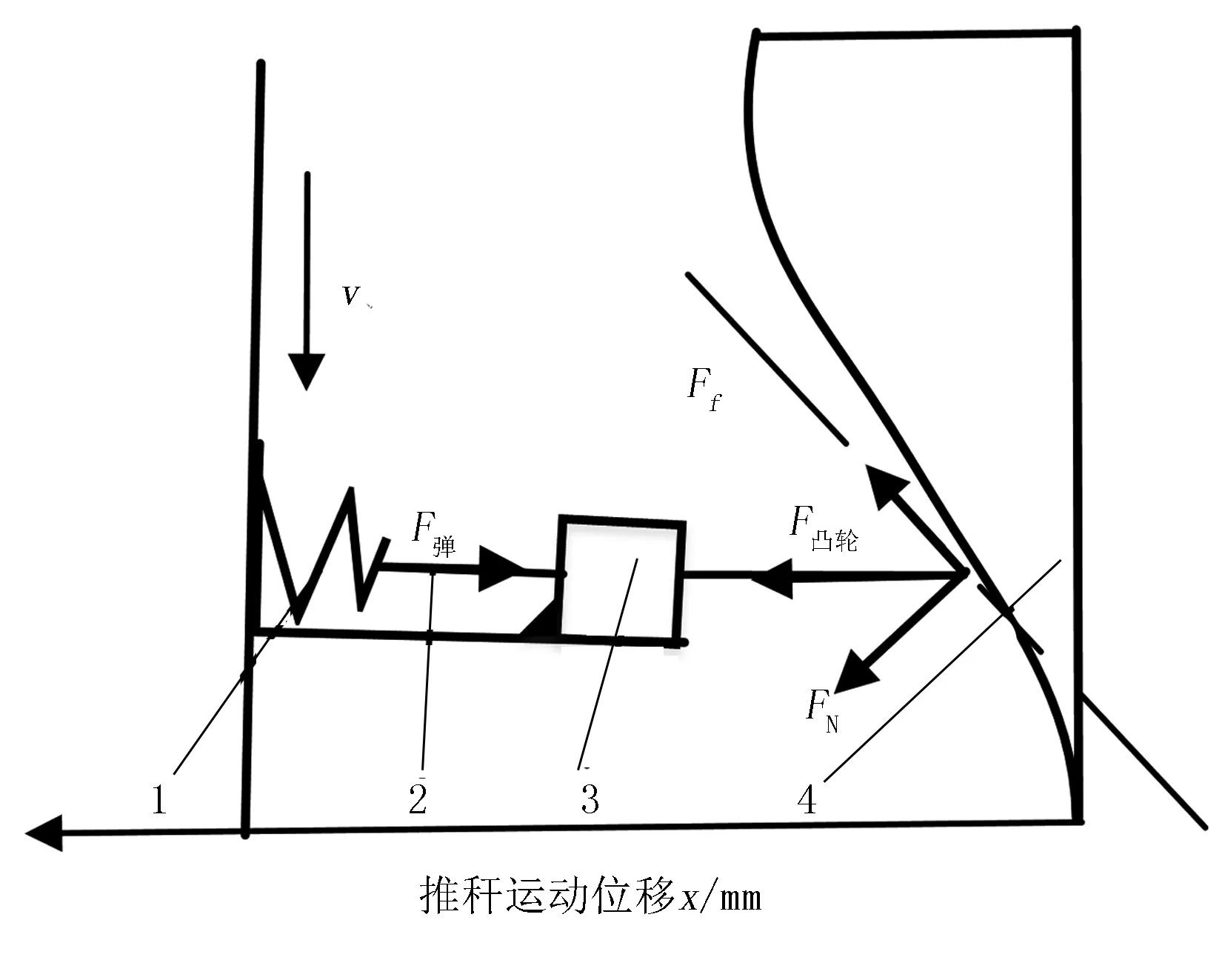
1.主軸 2.彈簧 3.推桿 4.凸輪
device in the cam return-stroke
圖3中,v為1、2、3構件沿著凸輪型線的前進速度;F彈為彈簧彈力;Ff凸輪對推桿的摩擦力;FN凸輪對推桿的支持力;F凸輪為凸輪對推桿的作用力的合力。
將動齒質量視為推桿質量的一部分,定齒質量視為主軸質量的一部分,推桿以角速度w繞著主軸軸心以半徑為r的旋轉運動轉化為以線速度為v=wr沿著凸輪回程型線移動。為了保證推桿能夠始終與凸輪回程型線接觸,需要在凸輪的線約束下,對彈簧推動推桿的運動狀態研究,建立了彈簧推動推桿運動的動力學模型,如圖4所示。圖4中,F彈為彈簧對推桿的彈力,m為推桿質量,F凸輪為凸輪對推桿的作用力的合力。

圖4 彈簧推桿的動力學模型
推桿的合力F等于彈簧彈力F彈=K(x0+x)減去凸輪支持力F凸輪。其中,x0為彈簧初始壓縮量,由于拉拔掉一朵花絲需25N的力,因此需要的彈簧壓縮量Xj=25N/(0.5×K)=2.5mm,x為推桿運動位移,即
F=K(x0+x)-F凸輪
(1)
當彈簧對推桿的彈力大于凸輪對推桿的支持力(即K(x0-x)>F凸輪)時,推桿的運動將不會脫離凸輪面。由于凸輪支持力F凸輪與凸輪型線曲線函數f(s)的二次導數、推桿質量成正比例關系,其表達為
(2)
式(1)、式(2)可以得出推桿運動位移與凸輪型線的關系為
(3)
其中,f(θ)表示凸輪型線與凸輪角位移θ的變化關系。
假設在沒有凸輪支持力F凸輪的作用下推桿的自由位移為x(t),則
(4)
其中,h=4.5mm為動齒與定齒張開時候的間距。通過對式(4)進行求二階導數,與式(1)得到推桿運動微分方程為
(5)
通過二階非齊次微分方程的解法,求得推桿運動位移x(t)的數學模型為
(6)
由圖3可得出推桿沿著凸輪軌跡運動對應的角位移θ及w(推桿繞著主軸的轉速),二者之間的關系為
θ=wt
因此,將推桿自由位移x(t)轉化為角位移函數x(θ),即
(7)
其中,C1、C2通過邊界條件求解。
當推桿在凸輪回程的最頂端時,θ=0,x(w)=x0,帶入式(7)得
C1=0
(8)
在凸輪回程的最低端時,假設θ=θ0,x(w)=x0=2.5mm,則
(9)
由式(6)~式(9)得,采摘裝置推桿自由運動的位移為
x(θ)=-7.5sin(2.05θ)+7
(10)
由于推桿的自由位移x(θ)大于推桿受凸輪支持力的位移x,因此由式(3)與式(10)可得
(11)
式(11)為紅花絲采摘裝置驅動機構的凸輪型線不失真的理論條件,為凸輪型線的設計合理性提供了理論基礎。
3 保真條件下的凸輪型線設計與試驗
3.1 凸輪回程型線設計條件分析
采用三次多項式、五次多項式、七次多項式對凸輪回程型線設計,以便選取最優多項式凸輪型線軌跡方程,其表達式為
(12)
(13)
(14)
通過對式(12)~式(14)求導得出凸輪型線對推桿的不同多項式加速度為
(15)
(16)
(17)
利用MatLab軟件繪制3種多項式對應的加速度與彈簧對推桿的加速度進行對比,如圖5所示。當凸輪對推桿產生的加速度小于彈簧對推桿的加速度時,即滿足式(11)凸輪不失真的條件。當凸輪的回程角度為0.14π、凸輪的回程為5.8mm時,推桿在彈簧推動下的加速度均大于三次多項式的凸輪型線,未發生失真現象。五次多項式與七次多項式均大于彈簧對推桿的加速度(即出現了凸輪型線失真),因此三次多項式作為凸輪回程型線的最佳函數。
通過對圖5進一步分析可知:當凸輪的基圓半徑與推桿的質量一定時,凸輪型線對推桿的加速度曲線與彈簧對推桿的加速度的曲線圍成的面積越大,則凸輪與推桿的摩擦力做的越大,凸輪表面的磨損越嚴重。通過3種多項式的比較發現:三次多項式對應的凸輪型線磨損最小,摩擦力做的功也最小。因此,保真凸輪機構的運動不失真,不僅能實現提高紅花絲采摘裝置的性能,還可以降低紅花絲采摘裝置的能耗。
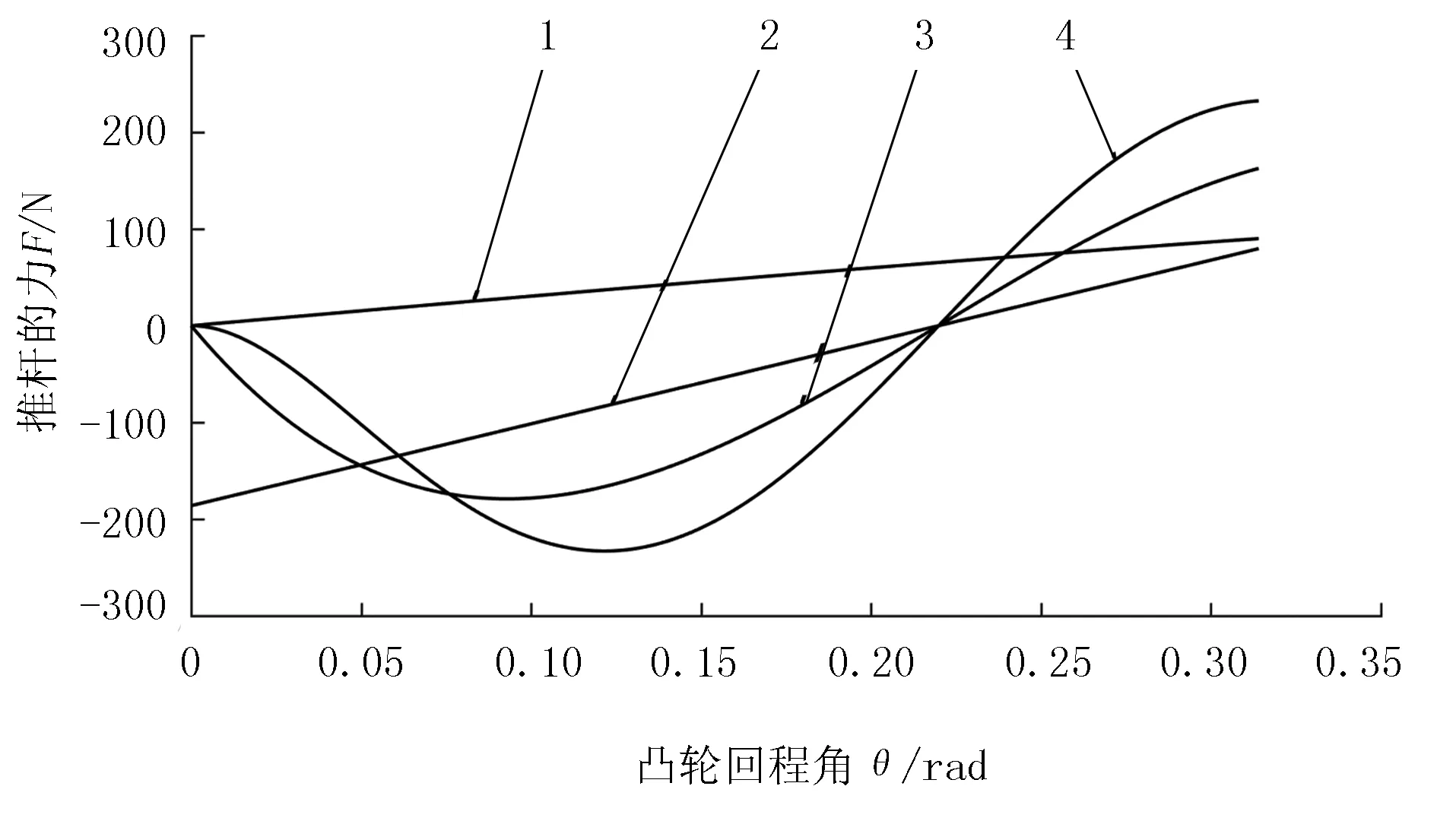
1.彈簧對推桿的力 2.三次多項式凸輪型線曲面對推桿的力 3. 五次多項式凸輪型線曲面對推桿的力 4. 七次多項式凸輪型線曲面對推桿的力
3.2 凸輪回程型線設計
當凸輪型線滿足凸輪動力學要求時,還應滿足紅花絲采摘裝置的工作要求。采摘紅花絲時,推桿的轉角為18°(即0.1π),動齒與定齒的間距為4.5mm。為滿足動力學的設計要求,保證凸輪機構運動的不失真,將凸輪回程角設計為0.14π。對凸輪的型線進行運動學校驗,即滿足當凸輪型線在凸輪回程角位移為0.1π時,凸輪的回程位移應該大于等于4.5mm。通過MatLab軟件對位移方程進行編程,如圖6所示。
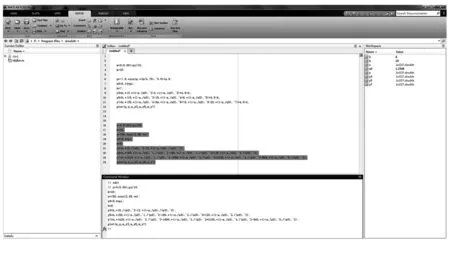
圖6 凸輪回程型線函數程序
通過多種多項式方程進行軌跡仿真,如圖7所示。通過分析發現,三次多項式對應的凸輪回程軌跡也最為理想。
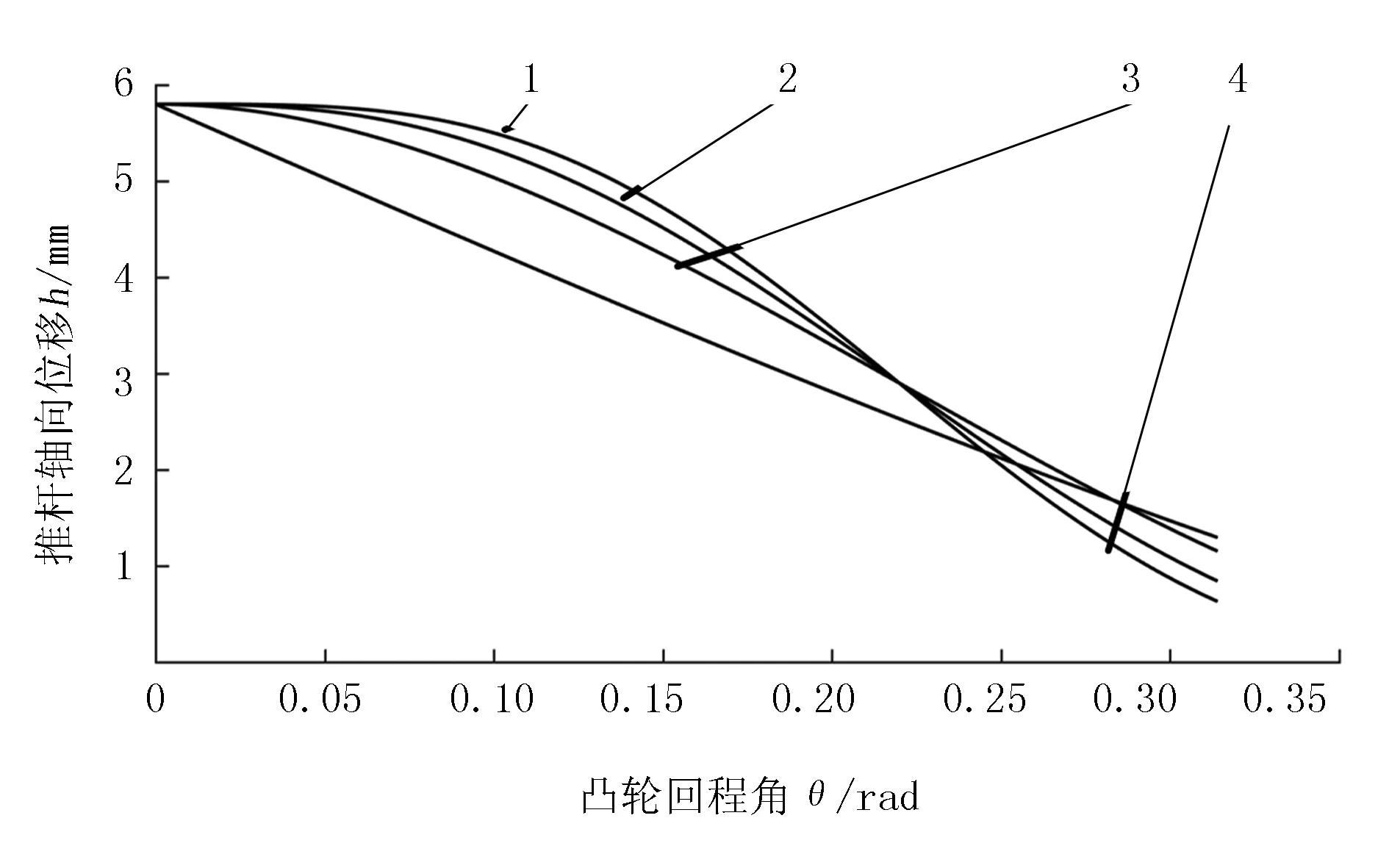
1.七次多項式的凸輪型線 2.五次多項式對應的凸輪型線 3.三次多項式對應的凸輪型線 4.推桿在彈簧作用下的自由位移
3.3 凸輪升程型線設計
凸輪升程在近休止與遠休止銜接處應光滑過渡,避免機械運動沖擊,要求凸輪的升程對應的型線兩端點都連續可導,即滿足各自的端點處速度與加速度均為零。為此,采用五次多項式進行設計,且凸輪型線采用對稱結構設計。凸輪回程角范圍為[0,0.14π],則近休止角與回程角和為π,近休止角為0.86π;為了保證升程段推桿運動平穩,取升程角為π/3,則遠休止為2π/3。采用MatLab繪制凸輪型線如圖8所示。
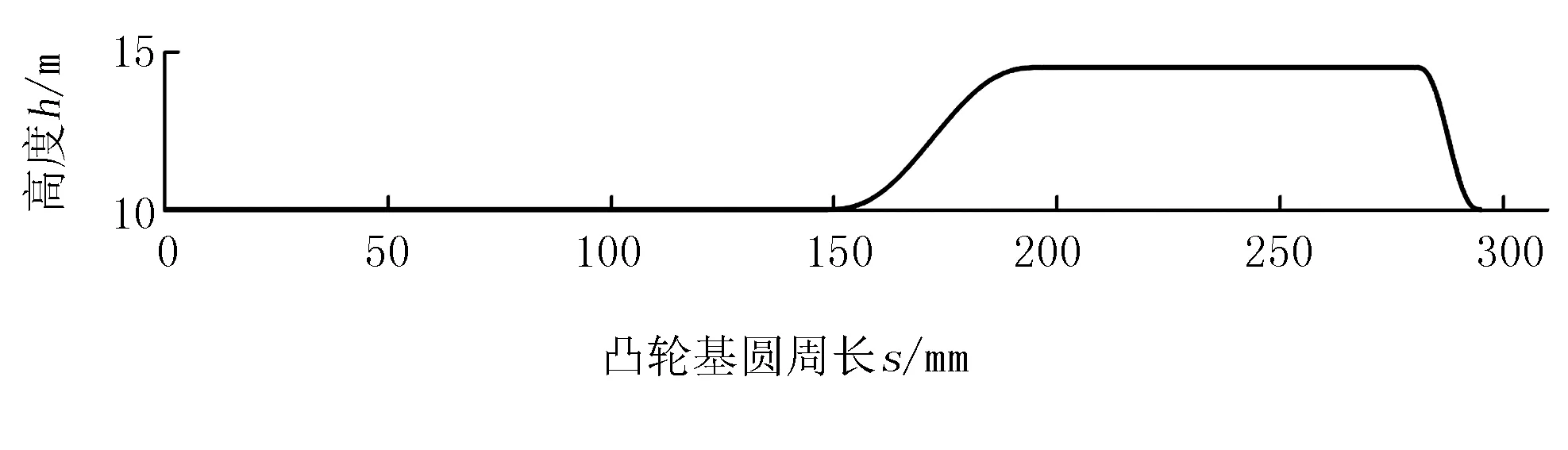
圖8 凸輪型線
通過Creo軟件繪制凸輪的三維模型如圖9所示。

1.近休止 2.凸輪回程 3.凸輪遠休止 4.凸輪升程
對紅花絲采摘裝置的推桿在凸輪斷面的運動進行仿真,如圖10所示。由圖10可以看出:在凸輪型線的作用下,推桿運動速度連續。

圖10 推桿運動速度分析
對推桿運動的加速度測試,如圖11所示。圖11中,未發生跳躍,說明推桿在凸輪型線運動的過程中不會脫離凸輪型線。
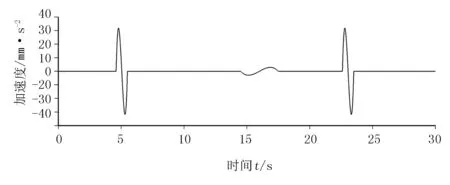
圖11 推桿加速度分析
3.4 臺架試驗
對凸輪的三維模型進行加工,安裝于紅花絲采摘裝置,通過高速攝像對推桿在凸輪面的運動情況進行測試,如圖12所示。

1.電機 2.鏈輪 3.供電箱 4.彈簧 5.主軸 6.采摘紅花的動齒與定齒 7.推桿 8.凸輪
電機通過鏈輪帶動主軸旋轉,在彈簧的作用下,推桿繞著凸輪的端面進行轉動。當主軸的轉速為10r/s
時,通過高速攝像機對推桿在凸輪面上的運動情況進行觀測,結果未發現推桿脫離凸輪,消除了采摘紅花絲的動齒與定齒產生振動,有效地避免紅花絲采摘裝置的漏采,提高了紅花絲的采凈率。
4 結論
1)由于凸輪型線設計不合理,造成凸輪機構運動失真。為避免該現象出現,凸輪對推桿的力應小于彈簧對推桿的作用力,以消除凸輪機構的運動失真。
2)為保證紅花絲采摘裝置采摘性能,通過MatLab軟件對推桿在彈簧與凸輪作用下的動力學模型進行分析,結果表明:動齒與定齒閉合需要的旋轉角應小于凸輪的回程角,凸輪回程的行程應該大于動齒與定齒張開間距;當凸輪的回程為5.8mm、回程角為0.14π時,三次多項式對應的凸輪回程型線不會造成運動失真。
3)高速攝像試驗表明:當紅花絲采摘裝置的轉速為10r/s時,紅花絲采摘裝置的推桿未脫離凸輪面。由此驗證了該設計理論的正確性。
