起算點坐標精度對高速鐵路CP0框架網GAMIT基線解算結果的影響研究
2019-05-27 07:34:48王學饒雄
鐵道勘察 2019年3期
王 學 饒 雄
(1.滬昆鐵路客運專線湖南有限責任公司,湖南長沙 410007;2.中鐵第四勘察設計院集團有限公司,湖北武漢 430063)
近年來,中國高速鐵路得到了快速發展,預計到2020年,總運營里程將超過3萬公里,屆時中國將建成以“八縱八橫”主通道為骨架、區域連接線銜接、城際鐵路補充的現代化高速鐵路網[1]。為控制帶狀控制網的橫向擺動[2]和提供統一的平面控制測量起算基準[3],《高速鐵路測量工程規范》[4]明確規定,必須建立高速鐵路CP0框架控制網。CP0框架網應以2000國家大地坐標系作為坐標基準,沿線路走向每50~100 km布設一個CP0控制點,并與國家A、B級GPS控制點或國際IGS參考站聯測,事后采用高精度GNSS數據處理軟件進行基線解算[5]。一些學者就起算數據對GPS靜態控制測量成果的影響做了相關研究,如王天倉[6]探討了起算點個數與分布方式對GPS靜態控制測量的影響;紀奕君[7]探討了起算點誤差對小區域GPS基線解算的影響;張兵[8]探討了GPS網中起算點兼容性的分析方法;劉振華[9]探討了起算點粗差的探測與定位方法。對于呈線狀布設的高速鐵路CP0框架網,起算點的坐標精度在控制網數據處理中至關重要,為了使起算點的坐標偏差不至于影響到CP0框架點相對定位的精度并提高整網的可靠性[10-11],工程實踐中,通常對解算CP0框架網所使用的起算點坐標精度有一定的要求。以杭黃高速鐵路CP0框架控制網作為研究對象,結合CP0框架網數據處理中的實踐經驗,對使用GAMIT軟件進行高速鐵路CP0框架網基線解算所允許的起算點坐標精度進行試驗研究。
1 起算點誤差對基線解算的影響分析
1.1 起算點誤差傳播與影響模型
根據GNSS相對定位雙差觀測方程[10]推導起算點初始坐標誤差對GNSS基線向量的傳播模型,設S1、S2為GPS基線向量的兩個端點,X1和X2分別為S1和S2在地心地固坐標系中的坐標分量,ΔX12為S1與S2構成的GPS基線向量。現設δX1為S1的坐標分量X1所含有的微小變化量,則以S1作為起算點而引起S2坐標產生的變化量為
δX2=δX1+δΔX12
(1)
式中,δΔX12為起算點S1坐標所含有的微小變化量對基線ΔX12的影響值。
設GPS接收機i和j對衛星p和q進行同步觀測,忽略大氣折射殘差對觀測產生的影響,則測站i和j進行相對定位的雙差觀測方程為

(2)

(3)
式中,xsat(t)為某顆衛星在t時刻的坐標分量,xrov為某地面測站點的坐標分量。

(4)


(5)
其中
λ·[
設地面GPS接收機同步觀測n個衛星,且ΔN是已知量,則將式(5)改寫為矩陣形式
(6)

(7)
其中
δR=ΔRj-ΔRi
令δXij為δXi的微小變化量對基線向量ΔX12產生的影響值,則由式(1)得
δXij=δXj-δXi=Q·δXi
(8)
其中
分析式(5)、式(8)可知,與起算點坐標有聯系的變量是誤差方程常數向量L和矩陣Q,當起算點坐標含有誤差時,L和Q會直接降低誤差方程線性化精度,進而給未知參數的求解造成一定程度的精度損失[12-13]。
1.2 誤差理論分析
大量試驗表明,起算點初始坐標誤差對基線的最不利影響可表示為[11]
δS=0.60×10-4×D×δX1
(9)
式中,δX1是起算坐標中所含有的誤差量/m;D為基線長度/km;δS為起算點初始坐標誤差引起的基線誤差/m。則不同起算點初始誤差對不同基線長度的最不利影響值如表1所示。
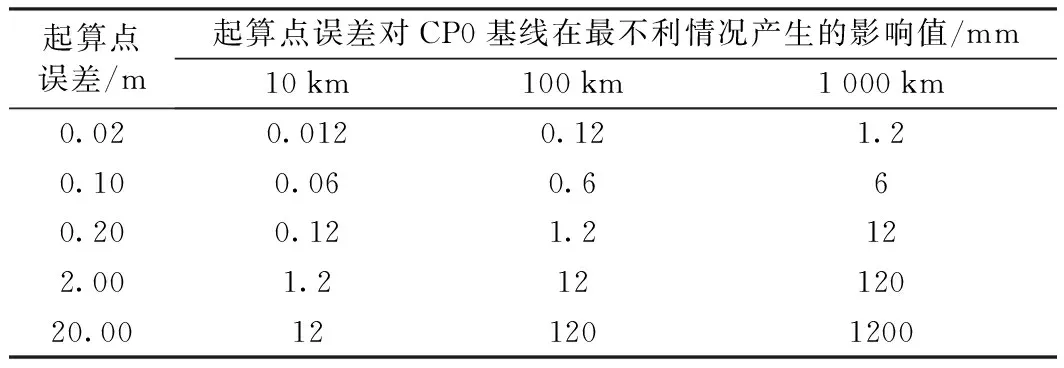
表1 初始坐標誤差對CP0基線向量的最不利影響值
分析式(9)可知,若以0.5 mm作為初始坐標誤差影響CP0基線向量的最大限值,則對CP0基線解算時初始坐標精度應滿足如下要求:短基線(<10 km)的起算點坐標精度應優于1 m;中長基線(10~100 km)的起算點坐標精度應優于0.1 m;長基線(>100 km)的起算點坐標精度應優于0.05 m。
2 高速鐵路CP0框架控制網GAMIT基線解算策略
對于GAMIT,可以通過sestbl、sittbl、sites.defaults等控制文件制定不同的解算策略[12],對GAMIT10.7軟件進行相關試驗后,建議采用以下參數:以IGS基準站作為解算的起始點,并對其X、Y、Z坐標分別設置3 cm,3 cm,5 cm的約束;統一IGS站和控制點觀測數據的歷元間隔為30 s,將衛星截止高度角設置為15°;基線解算模型設置為RELAX松弛解(即同時解算基線和軌道);基線觀測值類型設置為適合于中長基線的LC_HELP(即使用電離層約束求解寬巷模糊度的LC解)[14-15],進而抵抗電離層折射誤差;干濕延遲模型均采用Saastamoinen,干濕映射函數均采用目前精度較高的維也納映射函數(VMF1);為有效抵抗對流層折射誤差對高速鐵路CP0框架控制網基線解算的影響,采用PWL分段線性法估計天頂對流層濕延遲參數,參數的估計間隔宜設置為4~6 h;使用全球氣壓和溫度模型文件gpt.grid,可從該模型文件中內插獲取測站所在地區的氣壓和溫度[16-17]。
3 起算點坐標精度對CP0框架網GAMIT基線解算精度試驗
3.1 試驗數據來源
所采用的試驗數據分為兩種,即杭黃高速鐵路CP0框架控制網實測數據和IGS基準站數據。杭黃高速鐵路途經3區4縣2市,是長江三角洲城際鐵路網的重要組成部分,線路全長288 km,所用數據為該線路布設的4個CP0框架點在年積日182、183和184的觀測數據。使用的IGS站觀測數據采用Anubis[13]進行質量分析,其數據利用率、多路徑誤差等觀測數據質量指標均較為理想。
3.2 試驗方案
為研究不同起算點初始坐標精度對CP0框架網GAMIT基線解算結果的影響,將杭黃高速鐵路CP0框架網與6個位于北半球的IGS基準站進行聯合解算, 6個IGS基準站起算點分別為CHAN、CUSV、LHAZ、BJFS、SHAO、URUM,并在ITRF官方網站獲取6個IGS基準站在ITRF2014框架、2000.0參考歷元下的精確坐標,共設計6個方案進行對比研究,使用GAMIT10.7軟件進行解算,設計的各試驗方案如下所述。
方案1:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站坐標不加入任何誤差。
方案2:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站X、Y、Z方向分別加入2 cm誤差。
方案3:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站X、Y、Z方向分別加入10 cm誤差。
方案4:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站X、Y、Z方向分別加入20 cm誤差。
方案5:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站X、Y、Z方向分別加入2 m誤差。
方案6:在杭黃高速鐵路CP0框架網聯測的6個IGS基準站X、Y、Z方向分別加入20 m誤差。
4 試驗結果對比分析
4.1 標準化均方根誤差(NRMS)比較
標準化均方根誤差(NRMS)[14]被廣泛用于評價GAMIT基線解算精度,代表著各個時段的基線解與各時段基線解平均值的符合程度,正常情況下標準化均方根誤差應該小于0.3 m,一般情況下應為0.25左右,小于0.25 m視為解算效果較好。6個方案在182、183和184三個年積日解算得到的NRMS值如圖1所示。
由圖1可知,6個試驗方案得到的NRMS值均小于0.3 m。但事實上,即使在方案6情況下(加入20 m誤差),杭黃高速鐵路CP0框架網各基線分量的均方差已達到了分米級。因此,在CP0框架網基線解算收斂情況下,起算點初始坐標的精度對NRMS值并無較大影響,無法從NRMS值的情況比較各個方案的優劣。
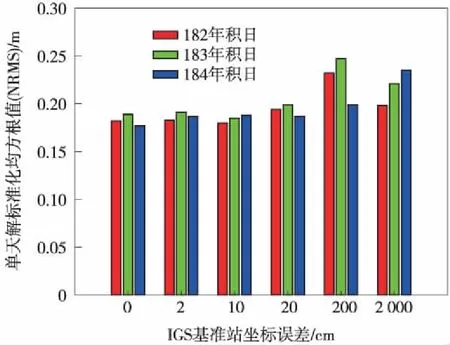
圖1 不同方案CP0框架網解算的NRMS值
4.2 基線分量改正值比較
如圖2所示,縱坐標為CP0框架網在182、183、184年積日3個單日解不同方案解算結果的X、Y、Z基線分量最大改正值。

圖2 不同方案CP0框架網解算的基線分量最大改正值
由圖2可知,當起算點坐標誤差增大至20 m時,182、183和184年積日的基線分量最大改正值高達0.374 m,已經遠大于解算策略中所設置的2倍約束量,說明方案6的解算結果存在錯誤;剩余5個試驗方案算得的基線分量最大改正值為0.031 m,都低于解算策略中所設置的2倍約束量。在基線解算收斂的情況下,不同起算點坐標精度并未對基線分量改正量產生明顯影響,且試驗方案1~試驗方案5三個單日解的解算結果并沒有表現出絲毫的規律,表明也不能從基線分量改正值的大小比較各個方案的優劣。
4.3 基線重復率比較
基線重復率[15]也是評價GAMIT軟件解算質量的一個重要指標,體現了不同觀測時段解間的內符合精度,基線重復率越小,基線的內符合精度越高,基線解算質量越好,其計算公式為
(10)

(11)
在6個試驗方案下,通過式(10)計算杭黃高速鐵路CP0框架網的基線重復率,如表2所示。此外,為了直觀展示杭黃高速鐵路CP0框架網不同方案基線重復率的計算結果,計算了100 km中長基線分量的重復率(如圖3所示)。

表2 不同方案CP0框架網GAMIT解算的基線重復率
分析表2、圖3可知,當起算點坐標誤差增大時,基線分量重復率也隨之變大,相應的基線解算質量隨之下降。當起算點初始坐標誤差增大至2 cm時,CP0框架網的基線解算精度基本未受影響,仍然保持在一個較高的水準;當起算點初始坐標誤差增大至10 cm時,基線重復率降低至厘米級,相應的基線解算精度也有所降低;當起算點坐標誤差增大至2 m時,基線重復率降低至分米級,相應的基線解算精度大幅度降低;當起算點坐標誤差增大至20 m時,基線重復率已接近至米級,相應的基線解算結果已存在錯誤。因此,從CP0框架網基線重復率可以看出,起算點坐標精度對CP0框架網基線解算結果具有較大影響,若要得到較為可靠的CP0框架網基線向量,則至少要求起算點坐標精度在10 cm內。
4.4 基線分量比較
如圖4所示,以方案1解算的結果(起算點無誤差)作為杭黃高速鐵路CP0框架網6條基線的最或是值,對其余5個方案的基線解算結果與方案1做差,由于在基線分量改正值比較環節已得出方案6的解算結果存在錯誤,因此圖4中未列出方案6與方案1的較差,不對其進行分析。

圖3 不同方案CP0框架網解算的100 km基線重復率引起的誤差
由圖4可知,當起算點坐標誤差在10 cm范圍內時,方案2、方案3解算的CP0框架網基線結果基本與方案1的解算結果保持一致;當起算點坐標誤差增大至20 cm時,方案4的解算結果與方案1較差保持在毫米級;當起算點坐標誤差增大至2 m時,方案5的解算結果與方案1的較差迅速增至厘米級,最大值高達2.74 cm,表明方案5解算結果不具可靠性,其解算精度較差。實際上,當起算點坐標誤差增大至20 m時,方案6解算結果與方案1的差值高達27 m,表明此時解算結果存在錯誤。
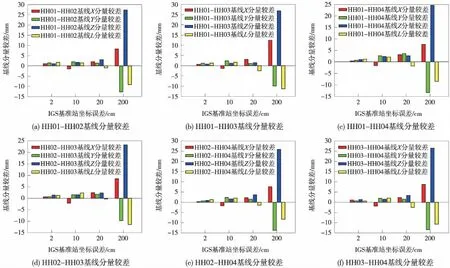
圖4 不同方案解算得CP0框架網基線分量比較
5 結論
以杭黃高速鐵路CP0框架網作為研究對象,對高速鐵路CP0框架控制網基線解算中起算點坐標的允許精度進行試驗研究,主要研究結果如下:
(1)在使用GAMIT軟件解算高速鐵路CP0框架網基線向量時,保證起算點初始坐標精度對得到正確的基線解算結果至關重要,所使用的起算點初始坐標精度越低,則CP0框架網基線解算結果的精度與可靠性就越低,且其影響隨著基線長度的增加而不斷擴大。
(2)使用GAMIT10.7軟件進行CP0框架控制網基線解算時,起算點坐標精度對確保基線解算結果的可靠性和精度至關重要,最好將其控制在10 cm內;當起算點初始坐標精度低至20 cm時,GAMIT軟件解算的CP0框架網基線在X、Y、Z三個方向的分量可仍保持在mm級;但當起算點坐標精度低至2 m時,基線解算的結果不具可靠性,存在一定程度的錯誤,無法滿足高速鐵路CP0框架網基線解算的精度要求。
(3)《高速鐵路工程測量規范》中要求起算點精度應優于10 cm。通過高鐵實測數據的試驗分析,從標準化均方根誤差、基線分量改正值、基線重復率和基線分量較差等多個方面進行比較。結果表明:在使用GAMIT10.7軟件基線解算策略下,高速鐵路CP0框架控制網解算所需的起算點精度可放寬至20 cm。
