液壓振動臺位移補償的PID控制方式的研究?
2019-05-29 01:28:20何少佳閆奧博祝新軍紀效禮
制造技術與機床 2019年5期
關鍵詞:系統
何少佳 閆奧博 祝新軍 紀效禮
(①桂林電子科技大學機電工程學院,廣西桂林541004;②紹興職業技術學院,浙江紹興312000)
隨著我國對高端裝備的不斷投入。如何去提高裝備的可靠性的問題,已經越來越引起制造業企業的高度重視,這也是我國高端制造的必經之路[1]。
當前,模擬產品在運行、存儲等過程中所受到的振動激勵一般通過振動模擬設備來模擬[2]。我國目前的振動模擬設備通常采用液壓振動臺,但我國液壓振動臺始終處于中低端水平。其主要原因是位移控制精度不高,則振動激勵的模擬效果大打折扣。
通過仿真建立一個高精度的數學模型很難模擬液壓振動臺系統。主要原因是其存在工藝復雜、系統參數時變、沖擊振動等復雜因素[3-4]。雖然傳統的PID控制器對其輸出效果有所改善,但是固定的PID參數值并不能解決系統自適應能力低,響應滯后等性能缺陷。
對液壓振動臺位移的控制一般轉換為對電壓值的閉環控制[5],通過中央處理器處理將電壓值轉換為相應的位移值。在運行過程中,由于液壓泵中壓力的損失,造成的位移變化不能直接反映出來,加上傳統的PID控制器的調節,液壓振動臺系統的位移的控制精度和穩定特性等性能嚴重受到影響。
因此,本研究在前人提出的理論研究的基礎上,提出在液壓振動臺的液壓泵中加入壓力傳感器檢測液壓泵的輸出壓力值,與設定的位移值形成雙閉環控制,單神經元網絡的PID控制系統對反饋回來的位移和壓力值進行處理,對位移誤差進行在線補償。
1 研究現狀
目前,為了了解液壓振動臺系統的位移精度控制方面的問題,我國的一些學者對其做了一些研究,比如胡紅波[6]提出了一種位移反饋控制系統,以減小振動臺輸出波形的失真度,但是系統的自適應能力低;晁智強[7]提出了一種基于PID控制和重復控制補償符合控制策略,但由于定值PID的局限,自適應低,加上液壓泵內部的壓力的損失等因素的影響,導致系統穩態精度不高;黃茹楠[8]采用常規PID控制和模糊控制策略對振動臺實施控制,有效地抑制了超調量和提高了動態特性;嚴俠[9]提出了一種單神經元PID位移控制系統,有效地提高了系統的自學、和自適應能力。
雖然液壓振動臺的位移控制精度問題在一定程度上得到了改善,但是與實際的液壓振動臺系統存在較大的差異。當受到外界干擾時,很難獲得高精度的位移控制效果。因此,進一步改善液壓振動臺的位移控制精度的研究有著重要的意義。
2 液壓振動臺位移誤差補償的方案
由于液壓振動臺硬件系統結構復雜,直接精準地控制液壓振動臺的伺服作動器的位移非常困難[10]。我國大部分液壓振動臺對位移的控制一般轉換為對電壓值的閉環控制,通過處理器處理將電壓值轉換為位移值,但是這樣存在較大的誤差。在運行過程中,由于液壓泵中壓力的損失,造成的位移變化不能直接地反映出來,嚴重影響了液壓振動臺位移的控制精度。
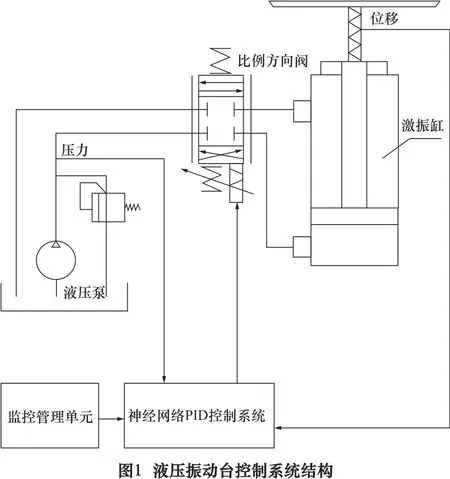
為了改善液壓振動臺的位移控制精度,研究在液壓泵的輸出口處加入壓力傳感器的方法,來檢測液壓泵的輸出壓力,從而實現對液壓振動臺位移誤差的補償。液壓振動臺控制系統結構圖如圖1所示。
在監控管理單元里預先設置好液壓振動臺的位移值和液壓泵的壓力值。神經網絡PID控制系統給比例方向閥電量信號,比例方向閥的流量和方向在其控制下發生變化,按照程序執行,改變伺服作動器的位移。通過位移傳感器獲得伺服作動器的位移值,實現對位移的控制,液壓泵的壓力值通過壓力傳感器獲得,并將其轉換為電量參數反饋到控制系統中,從而實現對壓力值的控制,來減小液壓振動臺在運行中由于振動、油液泄漏等因素帶來的液壓泵內部的壓力損失,導致位移的變化。監控管理單元,對設定的參數值和實際反饋回來的數值進行比較和處理,通過神經網絡算法,不斷修正輸出的參數,使輸出的效果不斷趨于最優化。這種控制方式可以減小外界干擾對系統的影響。
3 單神經元網絡的PID控制
在工業領域中,應用常規的PID控制,對精準的數學模型的調節有著極其重要的作用[11]。但對于液壓振動臺這種復雜的數學模型,應用常規的PID控制則不能滿足其伺服作動器的控制需求,表現出自適應能力低、反應遲鈍等弊端。基于單神經元網絡的PID智能控制,不但結構簡單,而且具有自學習和自適應能力,有較強的抗干擾能力和魯棒性[12]。
3.1 單神經元運算過程的原理
為此,本研究針對液壓振動臺的伺服作動器,引入單神經元網絡的PID智能控制,不僅能適應環境的變化且有較強的魯棒性。按照有監督的Hebb學習法則,單神經元網絡的PID智能控制器對加權系數不斷地調整從而實現自適應和自組織功能,進而改善其伺服作動器的位移控制精度和抗干擾能力以及魯棒性[13]。有監督的Hebb學習法則可表示為:

式中:Δwij(k)為神經元i、j的聯接權值;η為學習速率;dj(k)為期望輸出;oi(k)、oj(k)為神經元i、j的激活值。其運算過程結構圖如圖2所示。
圖2中:x1,x2,…,xn為神經元網絡神經元接收到的外部環境信號,wi1,wi2,…,win為神經元的聯接權。
3.2 液壓振動臺系統單神經元PID控制器的設計
采用基于單神經元網絡的PID和有監督的Hebb學習法則的智能控制器,對液壓振動臺系統反饋的位移值和壓力值與設定值進行比較和處理,產生的誤差通過具有自學習和自適應功能的單神經元網絡的PID控制器,從而調整出最優的PID的控制參數,實現對液壓振動臺的伺服作動器進行閉環控制。液壓振動臺系統的單神經元網絡PID控制器的拓撲圖如圖3。

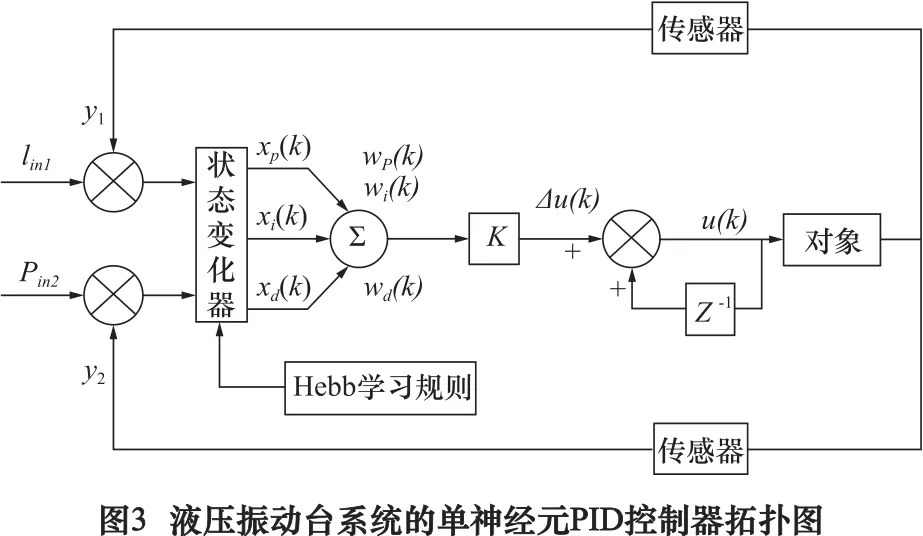
圖3中:lin1是液壓振動臺伺服作動器的位移,pin2是液壓泵的壓力;y1、y2是系統反饋的位移值和壓力值;xp(k)、xi(k)、xd(k)是神經網絡中神經元所接收到的外部信號。控制算法及學習算法為[14]:

式中:xp(k)=e(k),xi(k)=e(k)-e(k-1),xd(k)=Δ2e(k)=e(k)-2e(k-1)+e(k-2);ηp、ηi、ηd分別表示比例、積分和微分的學習速率;K為神經元的比例系數,K>0。
程序開始運行,首先給u(0)賦初值,然后單神經元網絡的PID按照有監督的Hebb的學習法則調整出最優的權值參數,來適應外部環境的改變,從而迅速地減小系統的穩態誤差,使系統達到最優化。
4 仿真驗證
本研究針對液壓振動臺位移誤差的補償調節,是加入壓力值與位移值形成雙閉環控制來對位移值進行補償。伺服作動器的位移值y1與液壓泵中輸出的壓力值y2互相影響,構成雙輸入雙輸出的耦合非線性的系統。假設系統被控的位移和壓力的近似數學模型[13]為:
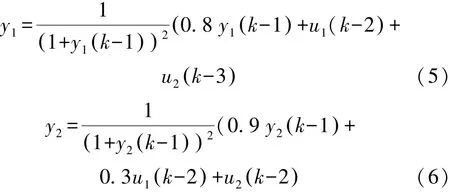
式中:y1、y2分別對應為位移傳感器和壓力傳感器反饋的相應參數;u1、u2分別對應為位移和壓力的單神經網絡控制器的輸出;假設設定的階躍信號參數分別為:rin1=0.9 cm、rin2=0.7 MPa。 當系統處于穩態時,在第0.3 s采樣時刻,分別加入0.05 cm、0.05 MPa的外界干擾。傳統PID控制器的階躍響應曲線圖如圖4所示,單神經元PID控制器的階躍響應曲線圖如圖5所示。
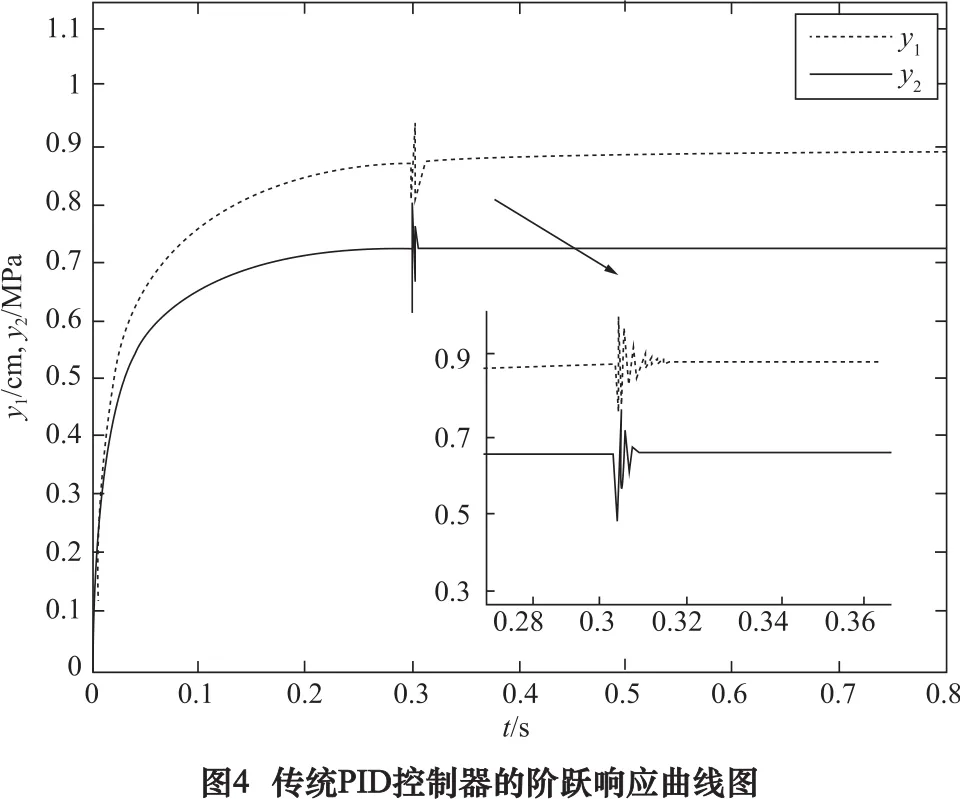
由圖4和圖5的對比可知,采用基于單神經元網絡的PID和有監督的Hebb學習法則的智能控制器,響應速度更快,能迅速達到所設定的參數值[15]。當受到外界干擾時,能迅速反應,并快速地回到穩定狀態,因此相比于常規的PID控制方式,其具有更精準和快速的位置控制的特點,可以有效地解決液壓振動臺在運行過程中位移控制的問題。

5 結語
本研究通過在液壓泵中加入壓力傳感器,其壓力值與位移值形成雙閉環控制來對位移值進行補償,以減小液壓振動臺在運行過程中所受到的干擾等問題造成的位移誤差。通過采用基于單神經元網絡的PID和有監督的Hebb學習法則的智能控制器來調整出最優的PID的控制參數,從而改善其伺服作動器的位移控制精度和抗干擾能力以及魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32