2K-H行星齒輪傳動優化設計數學建模與解算
2019-06-03 02:16:18史素華
中阿科技論壇(中英文) 2019年1期
關鍵詞:設計
史素華
(山東省民族中等專業學校,山東 濰坊 262500)
漸開線行星齒輪傳動與普通定軸齒輪傳動相比具有承載能力大、體積小、效率高、重量輕、傳動比大、噪音小、可靠性高、壽命長、便于維修等優點,廣泛應用于小汽車、重型載重汽車、工程車輛和飛機等的傳動系中[1]。
研究指出,同一制造精度下,行星傳動比起定軸線固定傳動,載荷一般沿齒寬分布得較好[2]。這是由于在行星傳動中齒寬對直徑的比值一般不超過0.7,而在普通減速器中卻達到1.6,在個別情況下,例如在渦輪機減速器中則顯著超過此值。在同樣條件下,行星傳動的箱體重量比普通定軸齒輪傳動的箱體其重量要小好幾倍,因為行星傳動箱體外廓尺寸比普通定軸齒輪傳動的箱體要小得多。
設計行星傳動時,正確選擇齒輪參數的意義遠比設計普通定軸傳動的大。齒輪參數選擇不當時,不但可能喪失在外廓尺寸和重量方面的優點,甚至可能得到不利于使用的傳動。
按最小體積為目標對行星齒輪機構進行最優化設計,不僅對縮小體積,而且對減小質量、節約材料及降低成本等都是很有實效的,這些對汽車及飛機這一類的產品尤其重要[3]。現在就以這類產品中常采用的2K-H型行星齒輪機構作優化設計。
一、2K-H行星齒輪設計要求
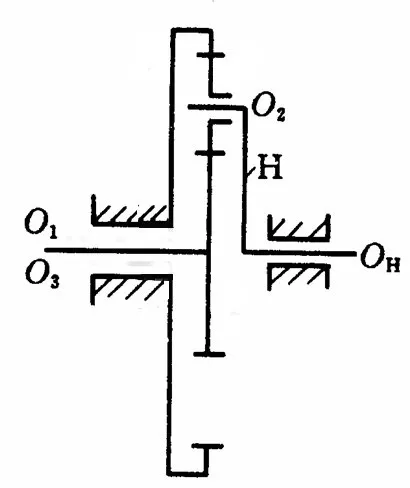
對于2K-H行星齒輪,如右圖所示,要設計一個符合條件的行星齒輪傳動,需要根據已知條件確定齒輪的幾個參數:各齒輪的齒數z,模數m,齒寬b,如果將行星輪的個數也作為設計變量,則有四個參數。根據機械設計知識,行星齒輪參數需要滿足以下兩種條件:一是幾何設計條件就是在不考慮材料視齒輪為剛體的情況下齒輪正常傳動的條件;二是齒輪的強度條件,行星齒輪作為一種機械構件,需要在確定材料的情況下對強度作一定的要求,保證齒輪到達預期壽命[4]。以下作具體分析。
(一)行星齒輪傳動幾何設計條件
根據機械設計知識,在行星輪系中,各輪齒數的選配需滿足以下四個條件。
1.傳動比條件。保證實現給定的傳動比。

2.保證兩中心輪及系桿的軸線重合,即要滿足同軸條件(同心條件)。
當采用標準傳動和等移距變位傳動時,可得

3.保證各行星輪能夠均勻地裝入兩中心輪之間,即要滿足裝配條件(正確配齒)。
q—行星輪數,C—正整數
4.保證各行星輪不互相碰撞,即要滿足鄰接條件。
要保證相鄰兩行星輪的齒頂互不相碰,相鄰兩行星輪的中心距應大于行星輪齒頂圓直徑。

(二)行星齒輪傳動強度設計
1.齒面接觸疲勞強度條件
校核公式為

式中

K—載荷系數
T1—齒輪1轉矩(N?mm)
P—傳遞功率(kw)
n1—齒輪1轉速(r/min)
b—計算齒寬(mm)
m—齒輪模數(mm)
[σH]--許用接觸應力(MPa)
整理得

2.齒根彎曲疲勞強度條件
校核公式為

YF—齒形系數
[σF]—許用彎曲應力(MPa)
化簡得

(三)其他設計條件
1.不根切條件

2.齒寬限制條件

二、建立優化數學模型
(一)確定設計變量
取中心輪1齒數Z1、模數m、齒寬b和行星輪個數q為設計變量,即

(二)確定優化目標函數
按最小自重進行優化設計,取中心輪1和行星輪體積之和作為行星齒輪傳動重量指標。則目標函數可表示如下:


(三)確定約束條件
1.幾何約束

2.強度約束

(四)其他約束條件

(五)建立優化數學模型

Xl、Xu分別為設計變量X→的上、下界向量。
三、行星齒輪機構的最優化求解
由上面的分析可知,要對行星齒輪機構進行最優化求解,就是求解一個四維約束問題,同時考慮到一些變量為整形。所以歸納起來,2K-H型行星齒輪機構的最優化過程分為兩個階段:第一步是將設計變量看成是連續變量對目標函數求解最小值,第二步是對所求得的最小值的各個實型分量(參數)進行圓整和標準化處理。由上得出最優化的設計參數。
對于數學模型的求解,采用約束變尺度法,利用Fortran語言進行編程解算。
四、設計實例
某行星齒輪傳動,已知傳遞功率P=4.78MW,傳動比i1H=3.45,輸出轉速nH=487r min,齒輪材料強度 分 別 為[σH]=960MPa,[σF2]=378MPa,[σF1]=310MPa。
根據已知條件,帶入已建成的數學模型,對于YF的值,將曲線離散成24個點運用插值算法來取值。
除此之外,限制設計變量的上下限:

經上面的求解,得到以下結果:
Z1=73,Z2=53,Z3=179,B=56mm,m=3.75mm,q=7
五、結論
以上為數學建模的過程及設計實例,由此可以看出建立的數學模型行星齒輪傳動的最優化問題得到了解決,設計實例中算出的結果與實際數據相符合。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04

- 中阿科技論壇(中英文)的其它文章
- Study on Broad Spectral Properties of K 9 Glass Substrate by Ellipsometry
- Research on Key Technology of Intelligent Numerical Control Machine Tool
- Mathematical Modeling and Solution of 2K-H Planetary Gear Transmission Optimization Design
- Innovative Customer Service System Design Based on NB-IOT Filter Press
- Application of New Regenerative Braking Energy Absorption Device in Subway
- Literature Review on Entrepreneurial Intention of Chinese College Students Based on Literature Measurement Method