ADAS系統測試平臺設計及實現
2019-06-11 11:35:28孫濤丁琴琴李衛兵李娟
中國測試
2019年4期
孫濤 丁琴琴 李衛兵 李娟
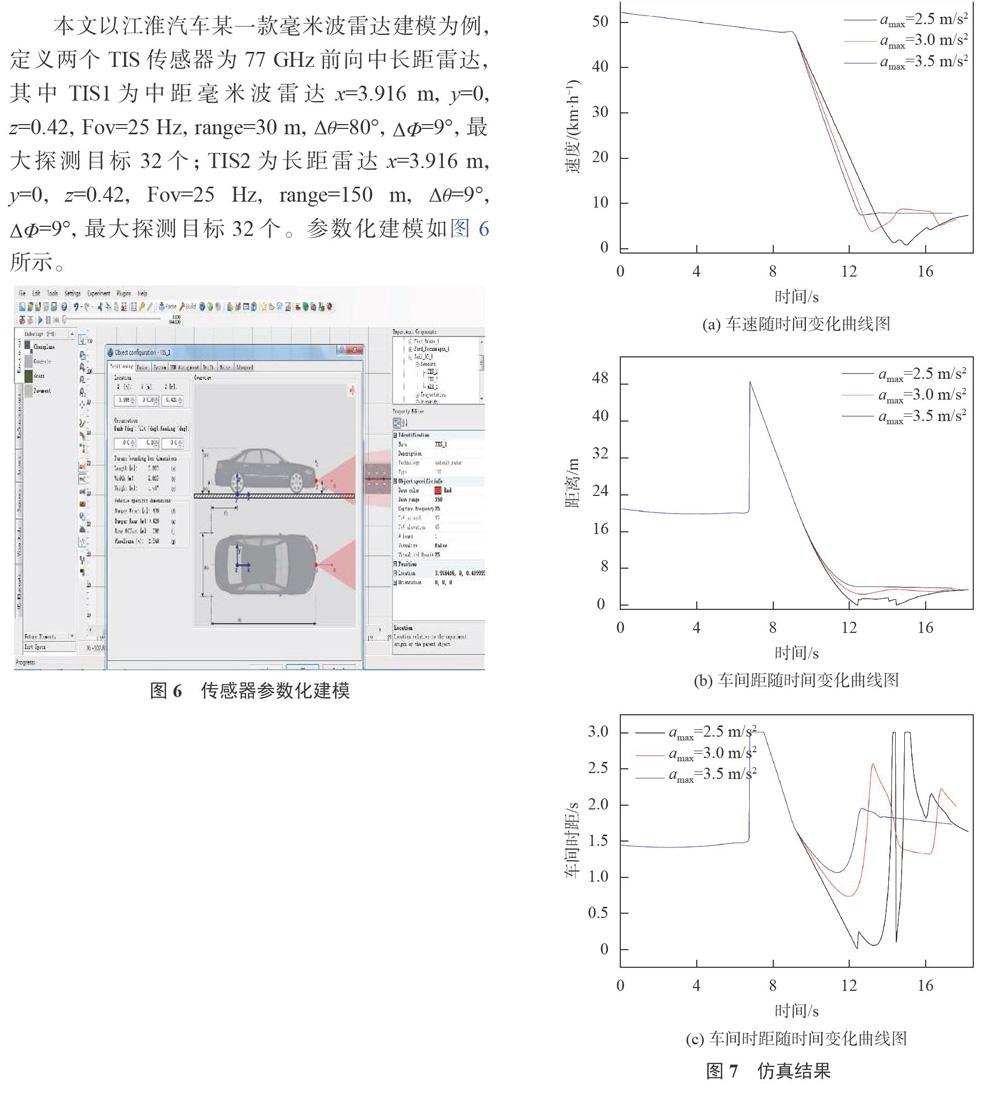
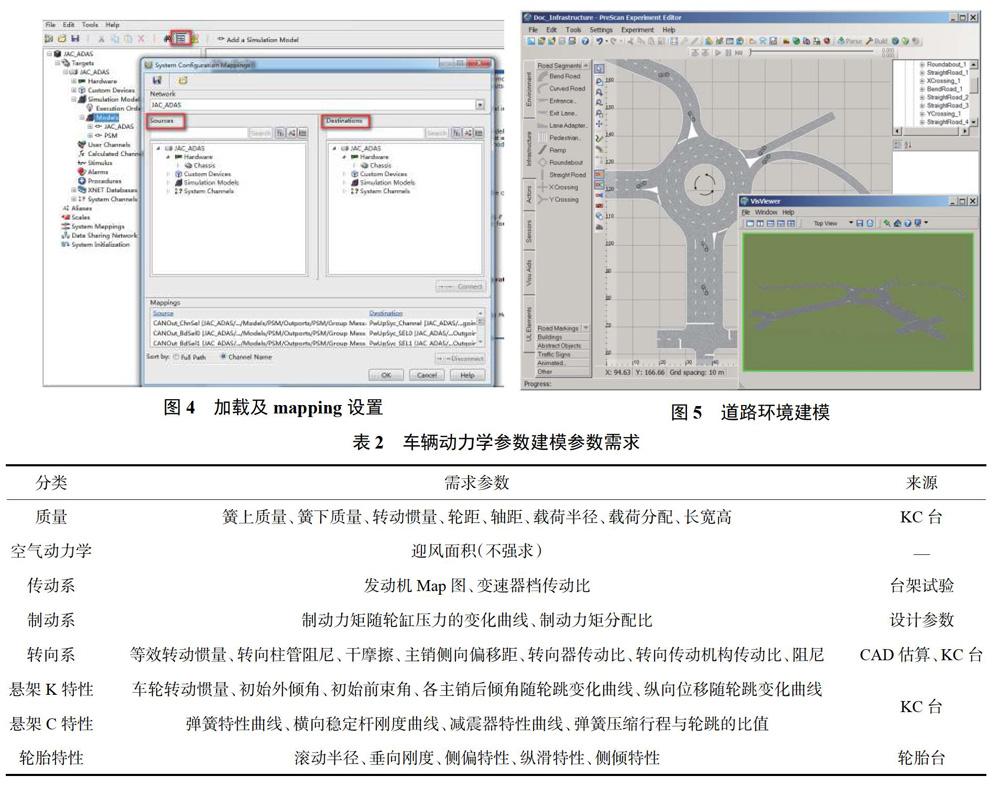
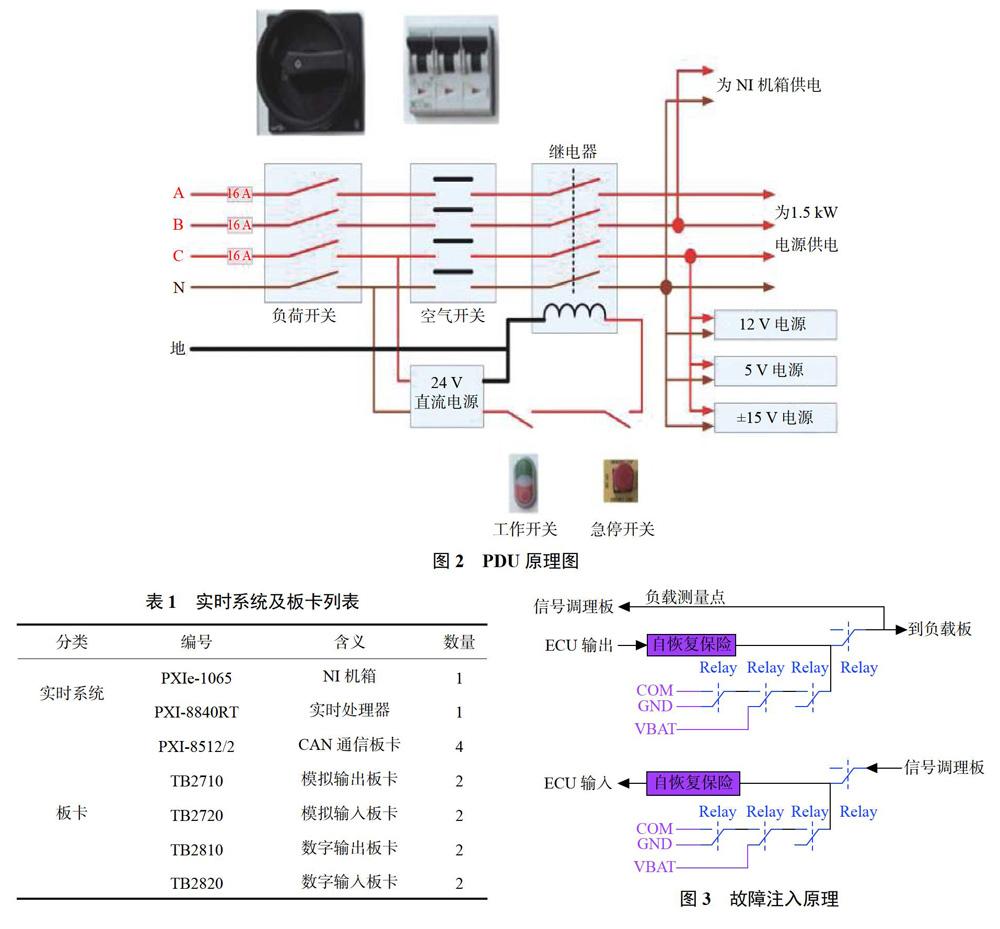
摘要:為實現ADAS系統的仿真測試,解決傳統實車驗證存在的測試成本高、周期長、場景不可復用、無法定量分析等問題,設計實現面向SAE 2級的智能網聯汽車系統級測試平臺。提出利用PreScan軟件進行交通場景仿真及虛擬傳感器建模、CarSim軟件進行車輛動力學建模,建立涵蓋真實底盤執行系統的測試平臺方案。基于ISO 15622中定義的典型工況進行仿真分析,搭建ACC功能涉及的Cut-off虛擬交通場景;基于試驗數據,對車輛動力學及虛擬傳感器進行參數化建模;測量HWT時間,實現法規要求參數的定量分析。構建的測試平臺能夠為ADAS系統提供完整的“人一車一路”仿真測試環境,為國內進行ADAS系統測試評價提供一個良好的研究平臺。
關鍵詞:車輛工程;測試平臺;ADAS系統;PreScan;CarSim;HWT時間
中圖分類號:TP216;TP337文獻標志碼:A 文章編號:1674-5124(2019)04-0151-06
0引言
高級駕駛員輔助系統(advanced driver assistantsystem,ADAS),是利用安裝在車上的傳感器,在汽車行駛過程中實時感應周圍的環境,收集數據,進行靜態、動態物體的辨識、偵測與追蹤,并結合導航儀地圖數據,進行系統的運算與分析,從而預先讓駕駛者察覺到可能發生的危險,有效增加汽車駕駛的舒適性和安全性。它涵蓋了諸如車道偏離報警系統(LDW)、盲點監測系統(BSD)、自動緊急制動系統(AEB)、自適應巡航系統(ACC)等。
ADAS具有廣闊的市場應用前景預計到2020年,駕駛輔助(DA)、部分自動駕駛(PA)車輛市場占有率將達50%。歐洲NCAP組織已經將LDW、AEB系統列入汽車安全評級加分項中,C-NCAP也在2018版將主動安全列入其評分標準。
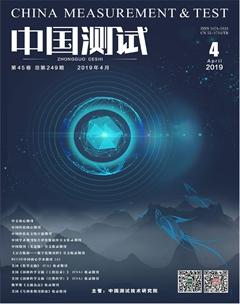
ADAS測試包括軟件在環(sIL)、硬件在環(HIL)、車輛在環(VIL)、場測、路測等環節,測試內容包括傳感器、算法、執行器等環節,測試目的包括應用功能、性能、穩定性和魯棒性、功能安全、形式認證等。……
登錄APP查看全文