基于MATLAB/Simulink的二連桿機器人的PID控制與仿真
2019-06-17 01:24:12楊一丹
科技資訊 2019年7期
楊一丹

摘? 要:主要研究了一類二連桿機器人應用PID控制理論進行軌跡追蹤的控制方法。該文首先給出二連桿機器人進行動力學模型,進而利用MATLAB/Simulink仿真環境,構造出PID控制模型框圖,使用Interpreted MATLAB Function嵌入代碼。通過改變PID參數進行仿真,該文分析了不同PID參數對二連桿機器人關節轉角誤差的影響,使機器人末端實際軌跡實現了很好的跟蹤效果。
關鍵詞:二連桿機器人? Simulink? PID控制
中圖分類號:G64? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1672-3791(2019)03(a)-0030-02
二連桿機器人是可自由改變關節轉角而完成不同作業的裝置,對二連桿機器人的關節轉角的準確控制關乎產品的質量和生產的效率,是工業生產關鍵的一環,因此應用PID控制算法對其轉角的控制顯得尤為重要。為減小二連桿機器人轉角誤差,于具有數值計算分析與數學建模功能的MATLAB/Simulink環境中應用PID控制理論模擬控制的全過程。
該文主要研究PID參數對二連桿機器人關節轉角誤差的影響,應用MATLAB中精確的矩陣等的運算和清晰的繪圖功能,Simulink中簡潔的模塊聯系和動態仿真曲線,得到了不同PID參數下的誤差曲線。
該文依托PID控制理論,以二連桿機器人運動軌跡為研究對象,通過MATLAB編程和Simulink仿真,構造出合理的理論模型,通過分析得到不同PID參數對誤差的影響,進而能夠使二連桿機器人運動軌跡基本與期望值相同,轉角誤差降至最低,達到了控制的目的。
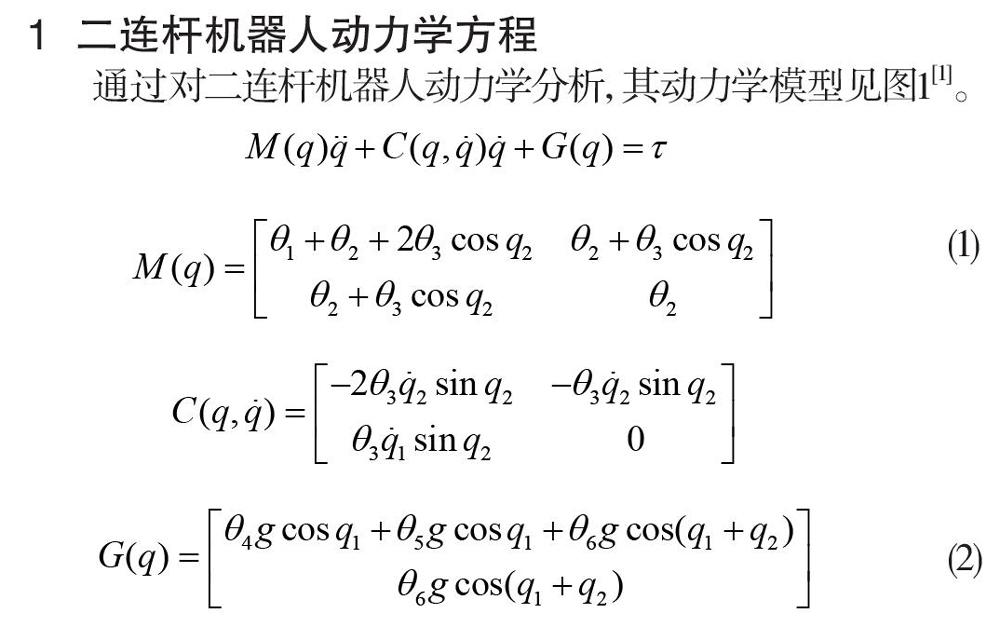
1? 二連桿機器人動力學方程
通過對二連桿機器人動力學分析,其動力學模型見圖1[1]。
2? PID控制及Simulink仿真模型
PID控制中的P(比例)、I(積分)、D(微分)參數對系統有不同的控制作用[2]。比例控制器成比例地反映控制系統的偏差信號,比例作用的放大倍數與被控參數的平穩性成反比關系,但比例控制器會產生余差。積分控制器的作用就是為了消除余差,積分時間與積分作用成反比,積分過程會因為偏差的存在而存在。微分作用的輸出變化與時間和偏差變化的速度成正比,微分控制器能提高系統的穩定性,但微分控制作用過強時會使控制器輸出明顯的峰值,使控制系統產生明顯的擾動[3]。
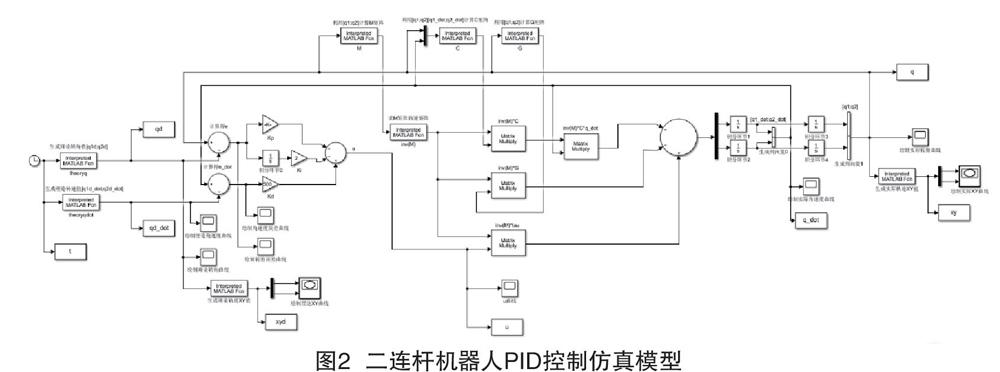
對二連桿機器人關節角度的控制分為3個部分,分別為誤差的產生和PID控制,動力學公式恒等變形的處理以及理論與實際誤差的比較。
誤差的產生和PID控制部分:由theoryq函數和theoryqdot函數輸入理論的二連桿關節的角度和角速度軌跡,理論值與實際值相減得到的誤差經過PID控制器的比例,積分、微分環節后就得到了外界應輸入的控制力矩。動力學公式恒等變形部分:根據二連桿機器人機械結構的具體參數,代入二連桿機器人運動學方程,應用加法器和求逆矩陣函數inv將公式恒等變形,得出二連桿的實際角加速度,再通過兩次積分得出二連桿關節實際轉角。理論與實際誤差的比較部分:由第一部分關節轉角誤差曲線分析不同PID參數下的情況;由第二部分得到的關節實際運動軌跡和第一部分的理論運動軌跡做比較,得到運動軌跡的誤差(見圖2)。
3? 仿真結果
當Kp增大時,系統響應速度加快,轉角誤差明顯減小,誤差波動更平緩,表明Kp能減少誤差。當Ki增大時,增加了系統誤差的超調量,誤差稍有減小,但效果不很明顯。當Kd增大時,減小了系統的超調量,轉角誤差減小。無論是何種情形,在一定誤差允許范圍內,實際運動軌跡與理論運動軌跡基本相同。總之,要綜合考慮PID的影響,得出與擬定期望值相同的結果。
4? 結語
通過使用MATLAB/Simulink,運用PID控制算法,建立了二連桿機器人的仿真控制程序。進行仿真實驗,明確了每個PID參數對二連桿轉角誤差的影響,調和3個參數的影響,關注實際生產中的需要和要求,可以使實際運動軌跡基本與理論運動軌跡基本相同,解決了二連桿機器人在使用過程中需要精確控制的問題。編程的思想、對物理模型的數學構建以及將數學圖表分析轉化為物理意義的過程同樣可應用于其他問題的研究。
參考文獻
[1] 高道祥,薛定宇.基于MATLAB/Simulink機器人魯棒自適應控制系統仿真研究[J].系統仿真學報,2006(7):2022-2025.
[2] 張建榮,羅國虎,郭金妹.基于模糊自適應與PID控制的六自由度工業機器人運動控制策略研究[J].科技視界,2018(30):5-6.
[3] 吳晗,薛磊,徐開蕓,等.球形機器人雙閉環PID控制設計與仿真[J].機電產品開發與創新,2018,31(4):82-84.
