關于蓄電池自動盒蓋組裝機的設計
2019-06-20 01:34:27劉云志林靖凱
科技視界 2019年12期
劉云志 林靖凱

【摘 要】針對鉛酸蓄電池生產過程中,手工作業的危害性,提出了設計蓄電池自動盒蓋組裝機的必要性。通過對組裝機的要求分析,蓄電池自動盒蓋組裝機設計了自動上料機構、盒蓋皮帶傳送機構、盒蓋翻轉移位機構、撥爪機構等組成機構,并就撥爪機構進行了具體的分析與結構設計。
【關鍵詞】鉛酸;蓄電池;盒蓋;組裝機;撥爪
中圖分類號: TM912 文獻標識碼: A 文章編號: 2095-2457(2019)12-0028-002
DOI:10.19694/j.cnki.issn2095-2457.2019.12.012
【Abstract】In view of the harmfulness of manual operation in the production of lead-acid batteries,the necessity of designing an automatic battery cover assembly machine is put forward. According to the requirement analysis of the assembler, the automatic feeding mechanism, the conveyor mechanism of the cover belt, the overturning mechanism of the cover and the paw-pulling mechanism are designed, and the paw-pulling mechanism is analyzed and designed concretely.
【Key words】Lead acid;Battery;Box cover;Assembly machine;Pawl
0 前言
隨著汽車的普及,我國對傳統的鉛酸蓄電池的需求量越來越大。目前,整個蓄電池生產行業的自動化程度不高,屬于自動、半自動生產作業,有些工位完全是手工作業,使生產率低下;另外,由于員工長期處于化學環境,對身體健康有很大的影響。鑒于這些原因,在蓄電池的盒蓋組裝生產中,進行自動化的生產作業非常有必要。
1 自動盒蓋組裝機的設計分析
蓄電池盒主要包含蓄電池盒體與盒蓋兩個部分,如圖1所示,蓄電池盒體內部裝有鉛酸溶液。在生產過程中,是采用自動裝置先將鉛酸溶液注入蓄電池盒體,再將蓄電池盒蓋進行密封。在蓄電池盒蓋的過程中,因為盒體內部有酸溶液,所以不適合人工操作;另外,盒蓋與盒體的吻合要好,不能產生位置偏移,否則,就會影響蓄電池盒的密封效果,所以在設計蓄電池自動盒蓋組裝機時,不僅要求自動化設計,還要求定位精準。
根據以上情況分析,可以采用PLC控制的自動運行裝置,其中包含機械部分、電氣部分以及軟件控制三部分。機械部分包含機構及結構部分;電氣部分包含控制箱,采用PLC控制、人機界面和其它硬件連接電路組成;軟件部分則由人機界面上的交互界面和PLC中的控制程序組成。
2 自動盒蓋組裝機總裝及主要部件的結構設計
2.1 自動盒蓋組裝機總裝設計
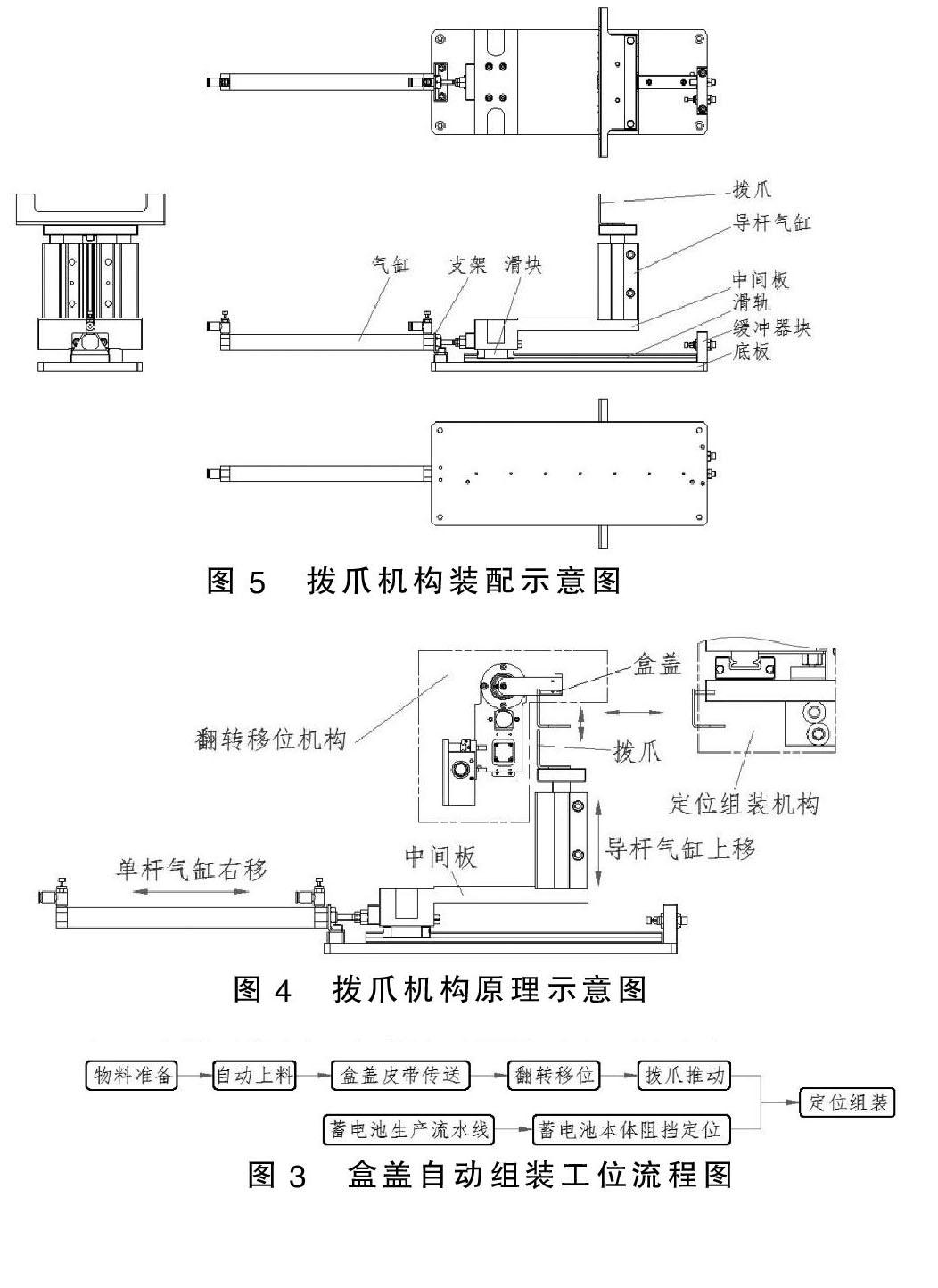
自動盒蓋組裝機的多個工位具有連續性,工作循環可以設定為:先進行盒蓋物料的準備,然后通過自動上料機構將盒蓋進行移位,再由盒蓋皮帶傳送機構進行傳送,接著由盒蓋翻轉移位機構將盒蓋進行翻轉,并由撥爪機構將翻轉后的盒蓋推至定位組裝機構,然后由定位組裝機構進行定位及盒蓋的組裝。同時,蓄電池生產流水線進行蓄電池盒的傳輸,由蓄電池本體阻擋及定位機構進行位置的確定,使蓄電池盒體停止,待盒蓋操作完畢,再進行下一個循環。其工位流程設置如圖3所示:
根據蓄電池自動盒蓋組裝機的工作原理,一共設計有自動上料機構、盒蓋皮帶傳送機構、盒蓋翻轉移位機構、撥爪機構、定位組裝機構、蓄電池本體阻擋及定位機構。其組件機構如圖2所示:
2.2 撥爪機構部件設計
2.2.1 撥爪機構的動作原理
撥爪機構是自動盒蓋組裝機的主要部分,有自動定位及移位的功能。其上道工序為盒蓋移位及翻轉,下道工序為盒蓋定位組裝。在上道工序進行盒蓋翻轉180度后,該撥爪機構將盒蓋推至下道定位組裝工序。其具體過程為:先由導桿氣缸向上移動,至設定位置,有桿氣缸再推動盒蓋到定位組裝機構的滑槽,再回位,然后進行下一個循環,其工作示意圖如圖4所示。
2.2.2 撥爪機構的結構設計
撥爪機構主要包含有撥爪、導軌氣缸、中間板、滑軌、緩沖器塊、底板、單桿氣缸、支架、滑塊等零件。撥爪機構的定位要求精準及平穩,在此,采用了導桿氣缸和單桿氣缸,配合中間板帶動撥爪上下移動和左右移動,其裝配結構如上圖5所示。
3 結語
蓄電池自動盒蓋組裝機集自動上料、自動傳送、自動翻轉、自動定位及移位、自動組裝為一體,實現了自動化的盒蓋組裝功能,改善了工人的勞動環境,又提高了生產效率。
【參考文獻】
[1]朱理.機械原理[M].北京:高等教育出版社,2010.
[2]王洪欣.機械原理[M].南京:東南大學出版社,2011.
[3]申冰冰.實用機構圖冊[M].北京:機械工業出版社,2013.
※基金項目:東莞職業技術學院,政校行企項目(編號:政201605)。
作者簡介:
劉云志(1974—),女,碩士,講師,研究方向為機械制造及自動化。
林靖凱(1999—),男,學生,18機械制造及自動化專業。
