數(shù)據(jù)驅(qū)動(dòng)的浮選過程運(yùn)行反饋解耦控制方法
2019-06-22 07:42:42姜藝范家璐賈瑤柴天佑
自動(dòng)化學(xué)報(bào) 2019年4期
關(guān)鍵詞:模型
姜藝 范家璐 賈瑤 柴天佑
隨著控制理論的發(fā)展,經(jīng)典控制理論已經(jīng)在實(shí)際工業(yè)運(yùn)用中取得了良好的應(yīng)用.在控制理論的指導(dǎo)下,過程控制器可以控制如閥門、泵等過程設(shè)備,使得過程變量如流量等穩(wěn)定地跟蹤目標(biāo)設(shè)定值,但是對于大部分工業(yè)生產(chǎn)過程來說,工業(yè)過程綜合自動(dòng)化的目標(biāo)不僅是將被控變量控制在目標(biāo)范圍內(nèi),而且要將表征整個(gè)工業(yè)過程運(yùn)行性能的產(chǎn)品質(zhì)量、生產(chǎn)效率、能耗等指標(biāo)控制在目標(biāo)工藝指標(biāo)范圍內(nèi)[1?5].通常,這些指標(biāo)與過程變量存在密切的關(guān)系,但是常常表現(xiàn)為多變量、強(qiáng)耦合、非線性、時(shí)變等復(fù)雜特性,常規(guī)控制方法難以實(shí)現(xiàn)工藝指標(biāo)的運(yùn)行控制.
對于浮選過程[6],其控制目標(biāo)是不僅使浮選過程的礦漿液位和礦漿流量跟蹤液位和流量的設(shè)定值,而且將浮選過程的精礦品位與尾礦品位控制在目標(biāo)范圍內(nèi).傳統(tǒng)的浮選過程控制由工藝工程師給出精礦品位與尾礦品位目標(biāo)范圍,操作人員根據(jù)精礦品位與尾礦品位的目標(biāo)范圍憑經(jīng)驗(yàn)給出浮選過程礦漿流量與液位的設(shè)定值.但是當(dāng)?shù)V漿濃度和粒度等生產(chǎn)邊界條件頻繁變化時(shí),人工控制不能及時(shí)準(zhǔn)確地調(diào)整浮選過程礦漿流量與液位的設(shè)定值,因而難以將精礦品位與尾礦品位控制在目標(biāo)范圍內(nèi),甚至?xí)斐僧惓9r.
實(shí)時(shí)優(yōu)化(Real time optimization,RTO)[7?8]以過程的經(jīng)濟(jì)效益為運(yùn)行指標(biāo),采用過程的非線性靜態(tài)模型開環(huán)優(yōu)化運(yùn)行指標(biāo),確定過程變量的設(shè)定值,通過過程控制使被控輸出跟蹤設(shè)定值,進(jìn)而保證過程運(yùn)行在目標(biāo)經(jīng)濟(jì)指標(biāo).對于大部分復(fù)雜工業(yè)過程來說,運(yùn)行過程通常表現(xiàn)為多變量、強(qiáng)耦合、非線性、時(shí)變等復(fù)雜的動(dòng)態(tài)特性,而RTO這類基于穩(wěn)態(tài)模型的運(yùn)行優(yōu)化控制方法,忽略了復(fù)雜工業(yè)過程的動(dòng)態(tài)特性,所以往往存在一定的控制延遲.
針對工業(yè)過程的動(dòng)態(tài)特性,文獻(xiàn)[9]提出了動(dòng)態(tài)環(huán)境下運(yùn)行指標(biāo)的實(shí)時(shí)優(yōu)化方法;文獻(xiàn)[10]將穩(wěn)態(tài)優(yōu)化與模型預(yù)測控制相結(jié)合來解決控制延遲問題;文獻(xiàn)[11]針對浮選過程,提出智能優(yōu)化方法來提高浮選過程的精礦品位與金屬回收率;文獻(xiàn)[12]針對赤鐵礦浮選過程,將模糊控制、規(guī)程推理、切換控制相結(jié)合,提出一種智能運(yùn)行控制方法;文獻(xiàn)[13?14]針對浮選過程提出一種基于強(qiáng)化學(xué)習(xí)的無模型控制方法.但是對于浮選過程來說,由于生產(chǎn)邊界條件變化頻繁,例如通氣量波動(dòng)、浮選藥劑波動(dòng)、原礦品位波動(dòng)等,因而上述動(dòng)態(tài)優(yōu)化和智能運(yùn)行反饋控制方法均難以實(shí)現(xiàn)動(dòng)態(tài)環(huán)境下浮選過程的運(yùn)行控制。
本文針對浮選過程運(yùn)行過程的多變量、強(qiáng)耦合、非線性、時(shí)變等復(fù)雜的動(dòng)態(tài)特性,利用未建模動(dòng)態(tài)前一拍可測的特點(diǎn),提出包括礦物品位控制器驅(qū)動(dòng)模型、PID控制器、反饋解耦控制器、未建模動(dòng)態(tài)補(bǔ)償器的數(shù)據(jù)驅(qū)動(dòng)的一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償PID解耦控制方法,并以單浮選槽為對象進(jìn)行了仿真實(shí)驗(yàn).
1 控制問題描述
1.1 浮選過程描述
浮選過程是利用礦物本身的親水或疏氣性質(zhì)或經(jīng)藥劑處理得到的親水或疏氣性質(zhì)進(jìn)行礦物分離的物理過程.本文以黃銅礦單浮選槽的浮選過程為例,該過程主要由槽體、給礦閥門、精礦閥門、尾礦閥門、通氣集流器組成,如圖1.
由磨礦過程生產(chǎn)得到的礦粒,與水和浮選藥劑混合成為浮選槽的給礦礦漿,經(jīng)給礦泵進(jìn)入浮選槽槽體,在浮選藥劑的作用下,被選礦物產(chǎn)生一定的親水性,在空氣集流器作用下,浮選槽內(nèi)產(chǎn)生大量氣泡,氣泡從槽底部向上浮,將被選礦物帶入浮選槽的泡沫層,達(dá)到分層分離的作用.被選礦物在泡沫層中經(jīng)由精礦閥門流出,為精礦礦漿;雜質(zhì)等在礦漿中經(jīng)由尾礦閥門流出,為尾礦礦漿,從而達(dá)到分離被選礦物與雜質(zhì)的效果.
浮選過程中,精礦品位與尾礦品位的控制具有重要意義.精礦品位是指浮選過程最終產(chǎn)品精礦中所含金屬量占精礦量的百分比,是反映精礦質(zhì)量的指標(biāo)之一.尾礦品位是指浮選過程最終產(chǎn)品尾礦中所含金屬量占尾礦量的百分比,反映了混合選別生產(chǎn)過程中金屬損失在尾礦中的情況.
浮選過程的運(yùn)行控制結(jié)構(gòu)為兩層結(jié)構(gòu),底層為設(shè)備層,通過改變給礦礦漿泵轉(zhuǎn)速與尾礦閥門開度來改變給礦流量和泥漿高度,上層為運(yùn)行層,通過改變給礦流量和泥漿高度來控制精礦品位和尾礦品位.當(dāng)浮選過程受到隨機(jī)擾動(dòng)時(shí),傳統(tǒng)的人工控制不能及時(shí)準(zhǔn)確地調(diào)整浮選過程礦漿流量與液位的設(shè)定值,難以將精礦品位與尾礦品位控制在目標(biāo)范圍內(nèi).
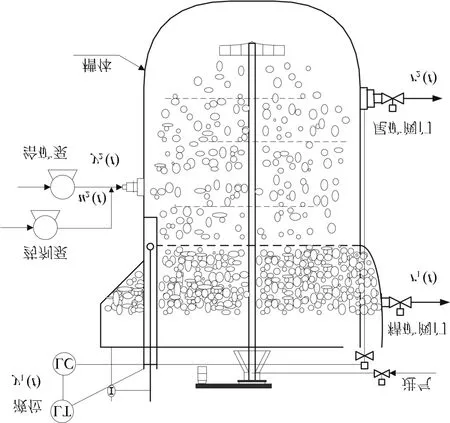
圖1 單浮選槽原理圖Fig.1 Schematic diagram of single flotation cell
1.1.1 浮選過程動(dòng)態(tài)模型分析
給礦流量和泥漿高度是以尾礦閥門開度u1(t)與給礦礦漿泵轉(zhuǎn)速u2(t)為輸入,泥漿高度y1(t)與給礦流量y2(t)為輸出的模型,其機(jī)理模型如下:
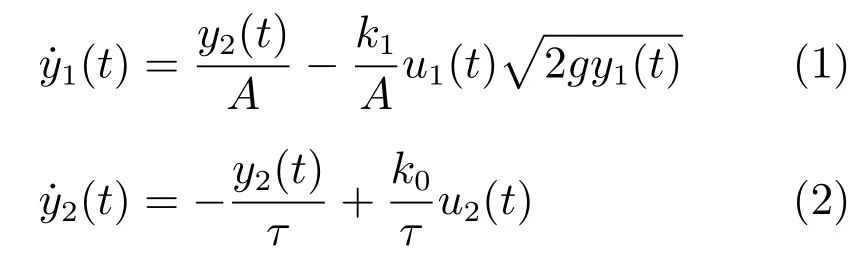
其中,τ為時(shí)間常數(shù),k0與k1為與泵和閥門相關(guān)的恒定常數(shù),g為重力加速度.
根據(jù)文獻(xiàn)[15?18],假設(shè):1)浮選槽中只有泡沫層與泥漿層;2)泡沫層與泥漿層中的礦物與脈石顆粒充分混合;3)泡沫層與泥漿層中的礦物與脈石上浮、下沉速率變化恒定.當(dāng)滿足以上假設(shè)時(shí),可知泥漿層與泡沫層中的礦物與脈石物料平衡關(guān)系.泥漿層中的礦物與脈石物料平衡關(guān)系包括泥漿層與泡沫層之間的物料轉(zhuǎn)移、給礦閥門通入、尾礦閥門流出三部分;泡沫層中的礦物與脈石物料平衡關(guān)系包括泥漿層與泡沫層之間的物料轉(zhuǎn)移、精礦閥門流出兩部分.由以上關(guān)系可以得到浮選過程的機(jī)理模型.
浮選過程的運(yùn)行模型可以描述為如下非線性動(dòng)力學(xué)模型:

其中,狀態(tài)X(t)=[x1(t),x2(t),x3(t),x4(t)]T,為泥漿中的礦物質(zhì)量、脈石質(zhì)量與泡沫層中的礦物質(zhì)量、脈石質(zhì)量;控制輸入y(t)=[y1(t),y2(t)]T,為浮選槽的給礦流量與泥漿高度;輸出r(t)=[r1(t),r2(t)]T為精礦品位與尾礦品位.式(3)中,
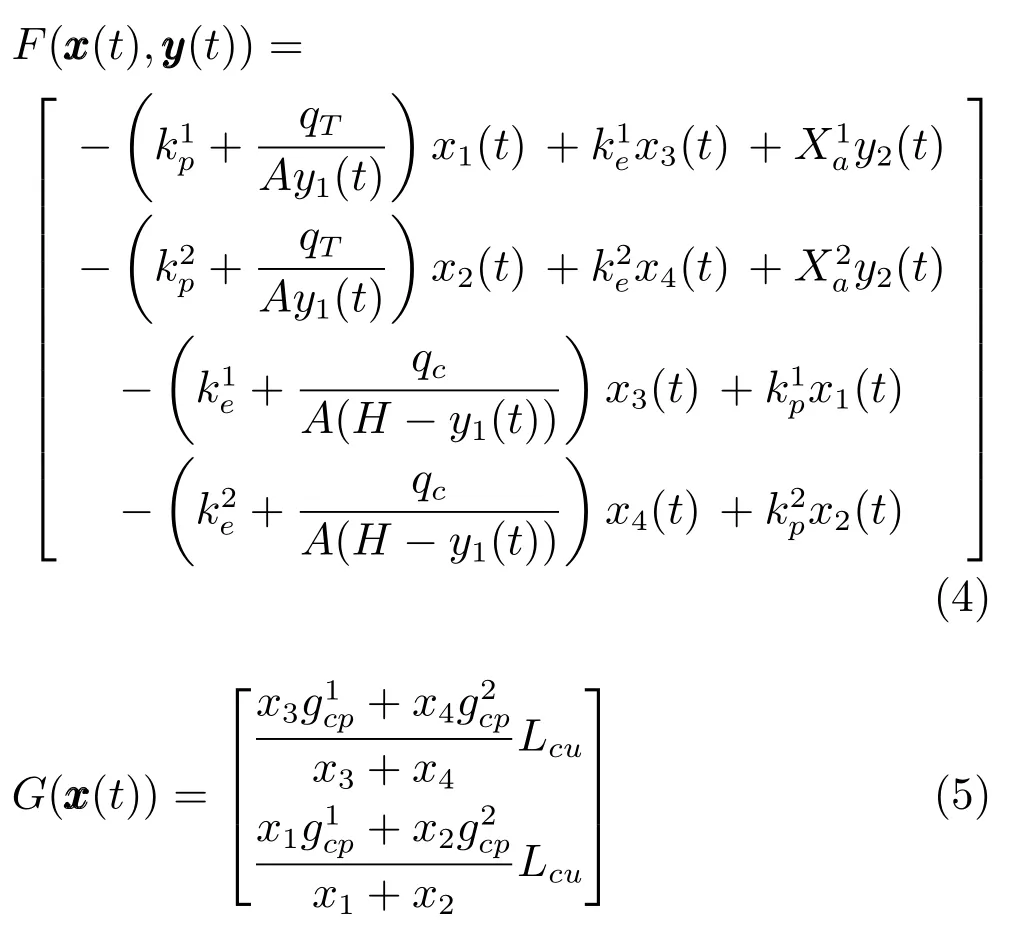
模型(4)與模型(5)中的參數(shù)含義如表1所示.
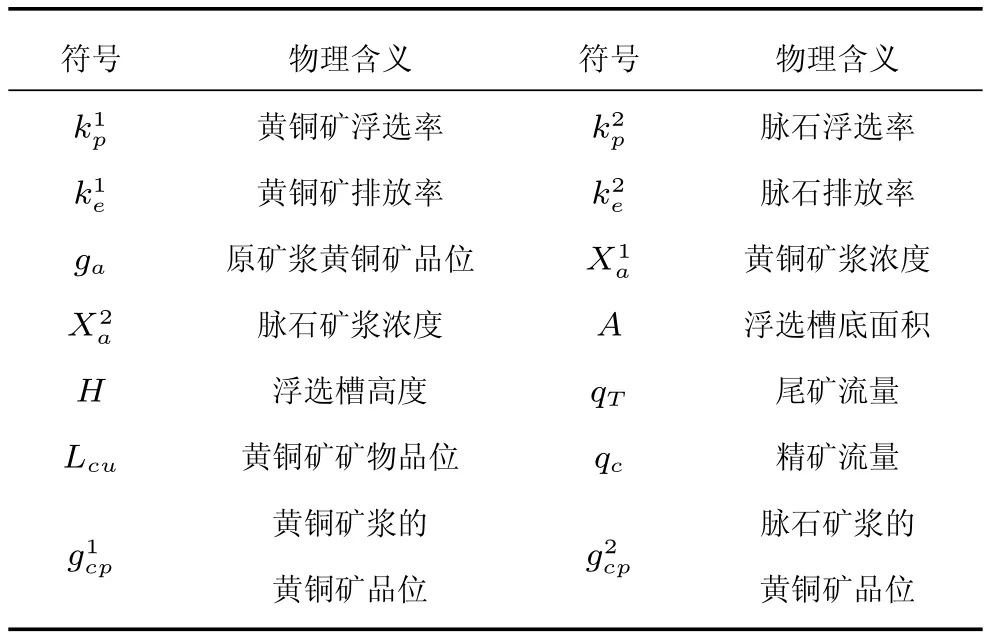
表1 浮選過程符號表Table 1 Flotation process symbol table
由運(yùn)行過程的動(dòng)力學(xué)模型(3)~(5)可知,浮選過程是以浮選槽的泥漿高度y1(t)與給礦流量y2(t)為輸入,精礦品位r1(t)與尾礦品位r2(t)為輸出的強(qiáng)非線性強(qiáng)耦合的過程.泥漿高度y1(t)與給礦流量y2(t)作為可控輸入,都能對浮選過程的輸出精礦品位r1(t)與尾礦品位r2(t)產(chǎn)生影響.同時(shí),磨礦過程產(chǎn)品產(chǎn)生的礦粒大小與浮選槽進(jìn)氣集流器電流IQ(t)的波動(dòng),都會造成浮選槽中的物料交互速率系數(shù)產(chǎn)生變化,同時(shí),由于該物理變化復(fù)雜,礦粒大小與浮選槽進(jìn)氣集流器電流IQ(t)對物料交互速率系數(shù)產(chǎn)生的影響難以用數(shù)學(xué)模型描述,而且,由于浮選前道工序濃密過程受到選礦廠礦漿回流擾動(dòng)較大,同時(shí)原礦礦物品位波動(dòng),必然導(dǎo)致黃銅礦漿濃度與脈石礦漿濃度產(chǎn)生變化.當(dāng)受到上述隨機(jī)的未知干擾時(shí),造成浮選過程動(dòng)態(tài)特性發(fā)生未知的隨機(jī)變化,為了將上述動(dòng)態(tài)特性變化用未建模動(dòng)態(tài)來描述,利用浮選過程運(yùn)行在工作點(diǎn)附近的特點(diǎn),將式(3)~(5)在工作點(diǎn)處線性化,即

其中

xeq,yeq,req分別為浮選過程工作點(diǎn)處對應(yīng)的狀態(tài)、控制輸入、輸出的值.oo1(·) 和o2(·)為非線性線性化后的高階無窮小與上述隨機(jī)變化產(chǎn)生的未建模動(dòng)態(tài).
對應(yīng)的采樣時(shí)刻為T(設(shè)采樣周期為To=mTd,Td為設(shè)備層采樣周期,m為正整數(shù))的離散模型為

則礦物過程的輸入輸出被控對象模型為

其中,
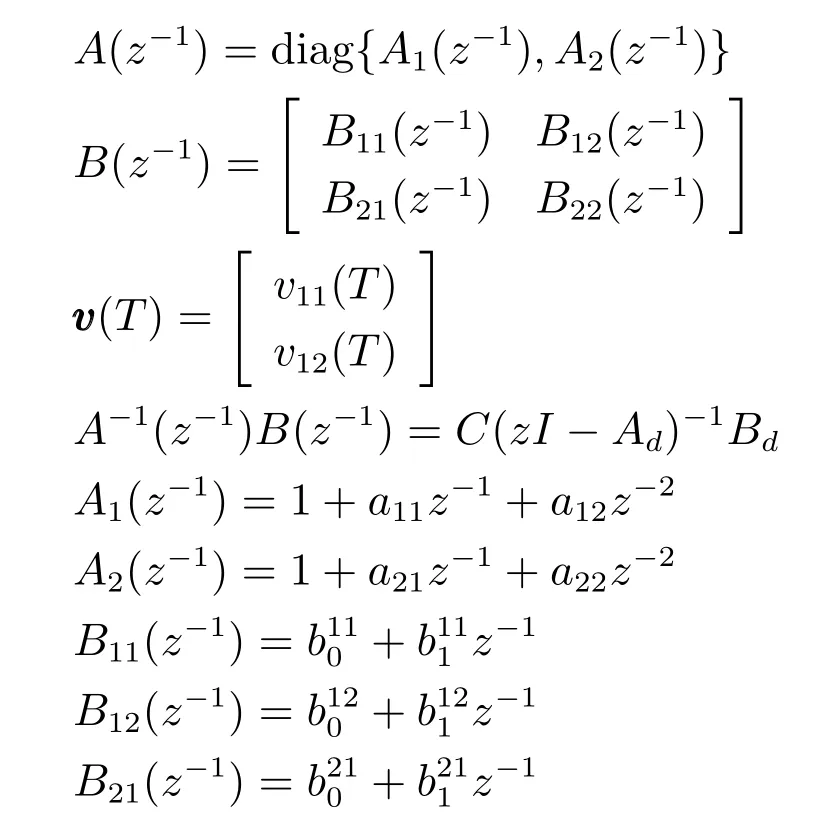

v(T)表示未建模動(dòng)態(tài).
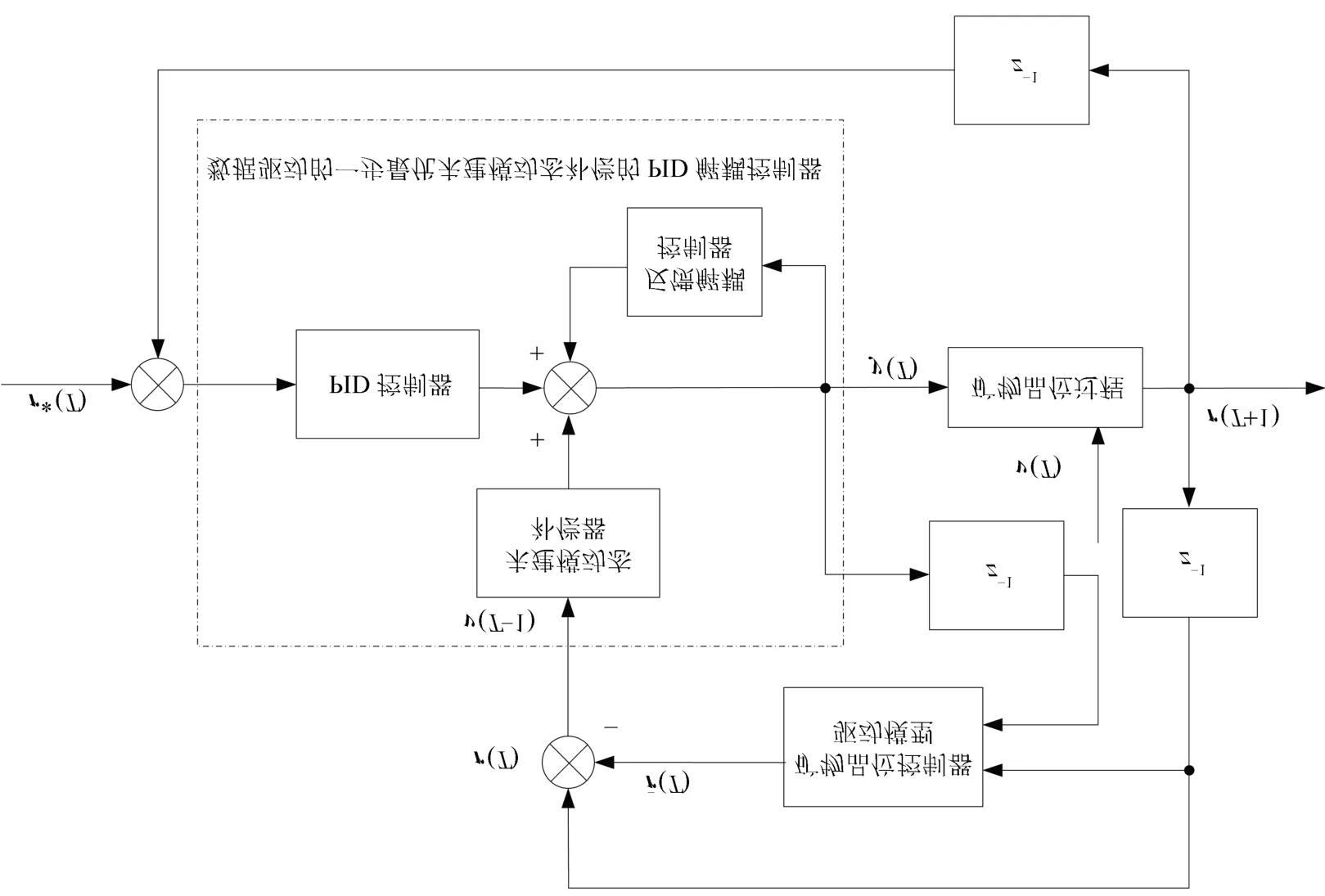
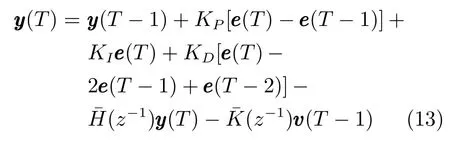
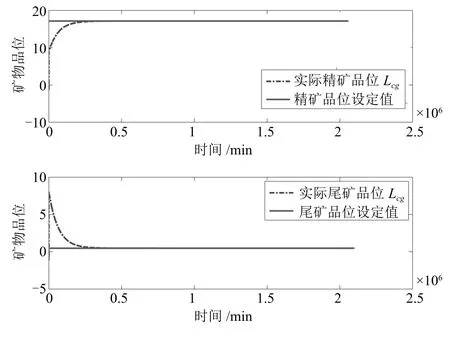
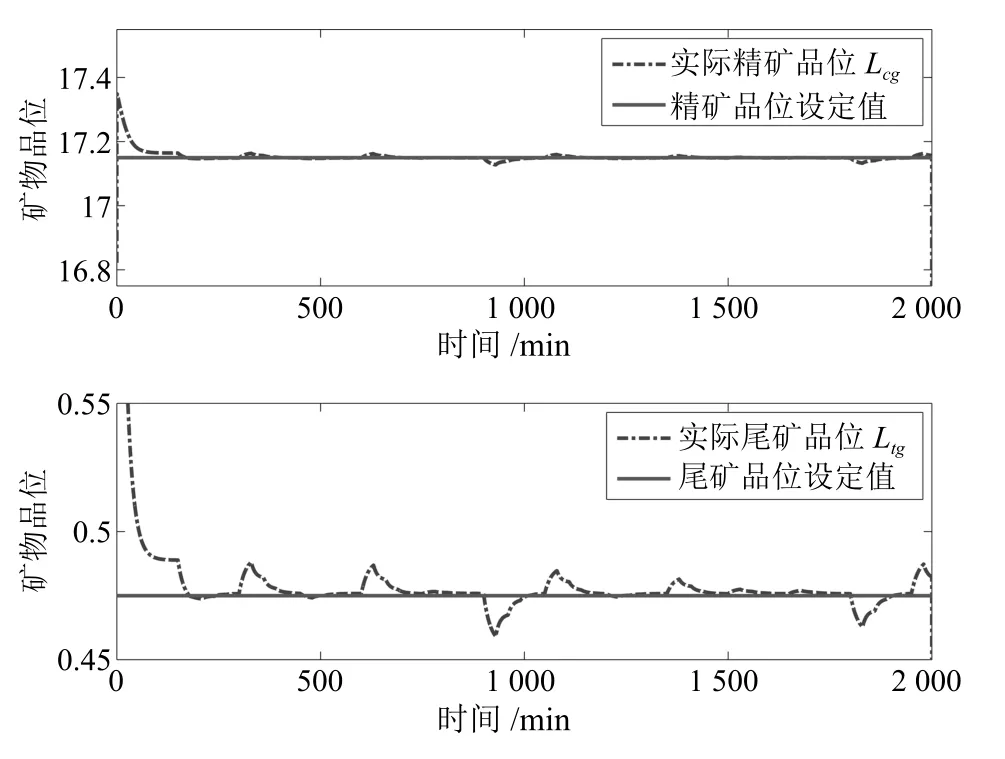
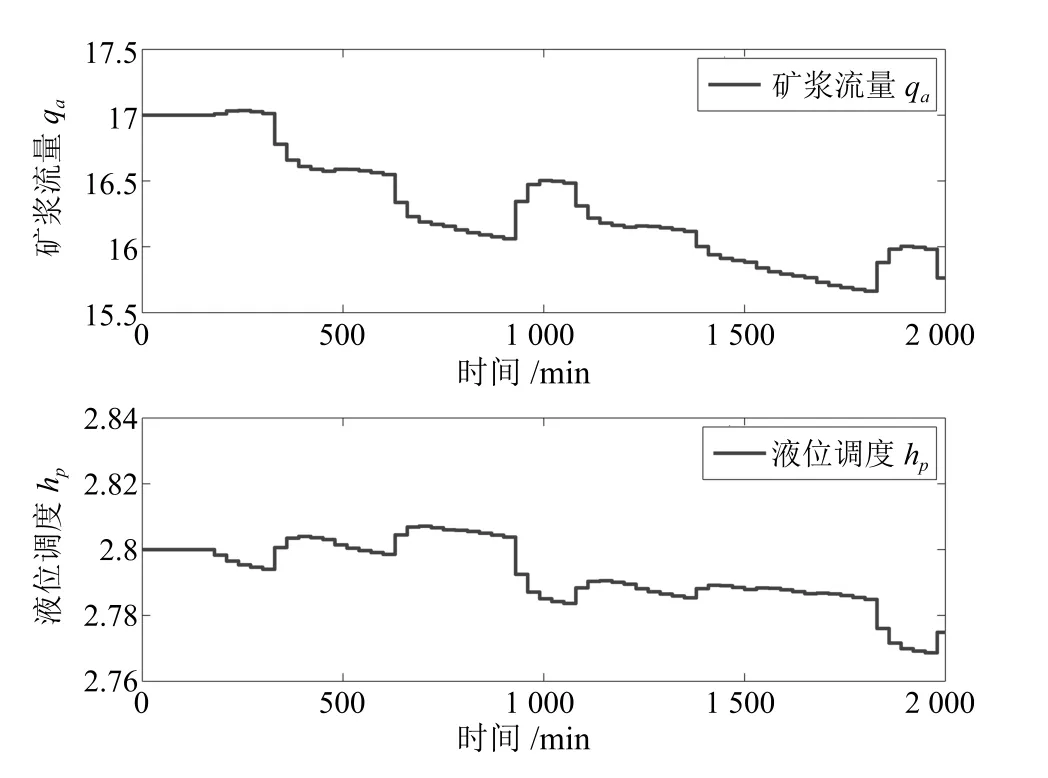
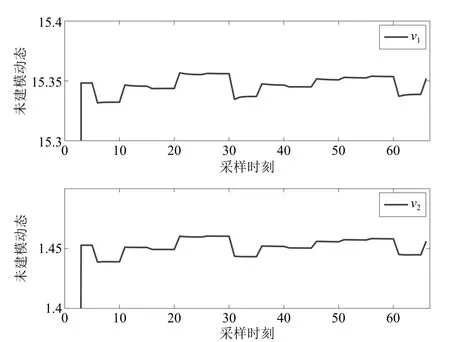
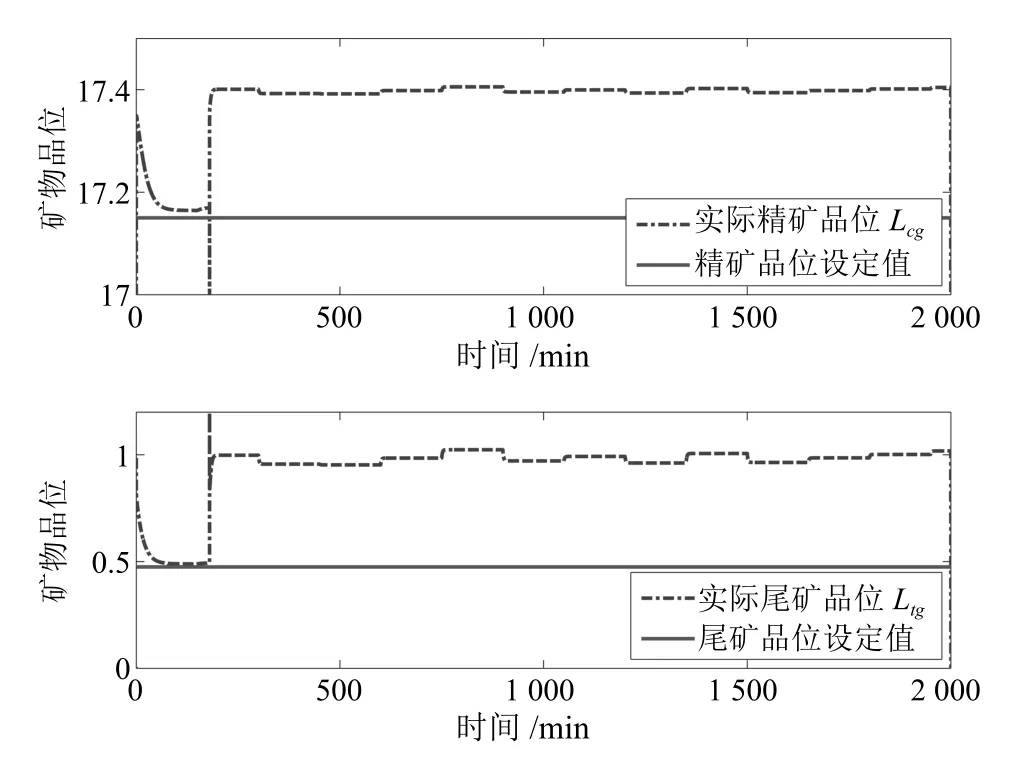
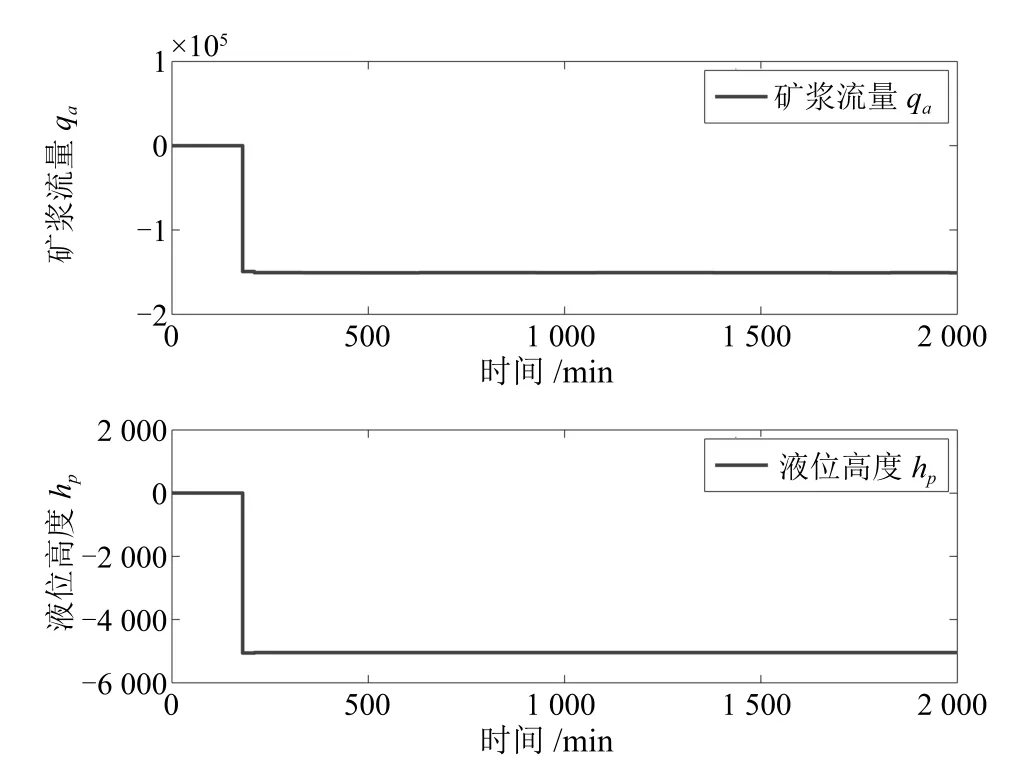
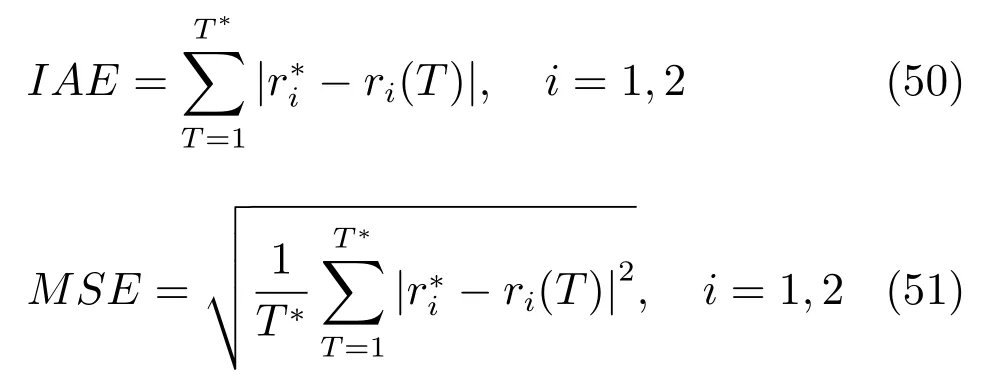
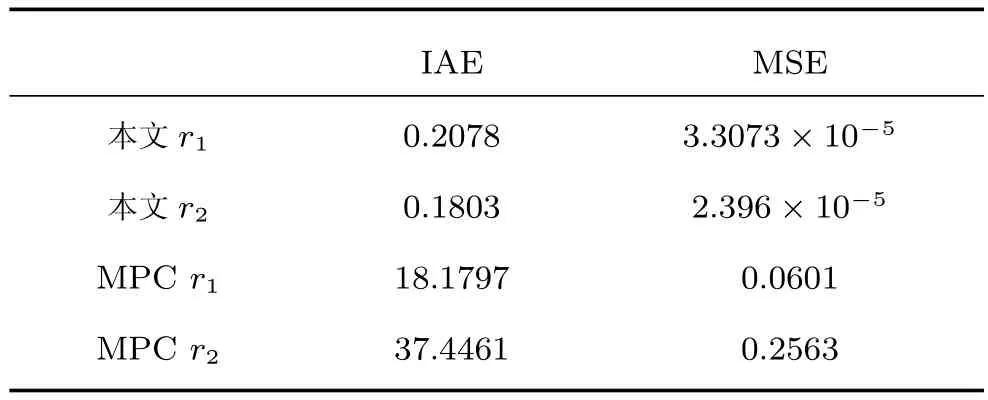
對于實(shí)際的浮選過程,由于運(yùn)行范圍滿足一定的物理約束,給礦流量滿足給礦泵工作效率的物理約束,礦漿高度滿足浮選槽的高度約束.同時(shí),精礦品位與尾礦品位滿足一定的范圍,即0%~100%之間,在確定了系統(tǒng)輸入輸出參數(shù)A(z?1)和B(z?1)時(shí),礦物品位過程的未建模動(dòng)態(tài)v(T)有界,即∥v(T)∥ 因此,浮選過程的控制目標(biāo)是在浮選過程受到礦粒大小、進(jìn)氣集流器電流IQ(t)、原礦礦物品位ga的隨機(jī)的未知干擾時(shí),控制精礦品位與尾礦品位在一定的范圍內(nèi): 其中,Lcgmin和Lcgmax分別是精礦品位目標(biāo)范圍的上下限,Ltgmin和Ltgmax分別是尾礦品位目標(biāo)范圍的上下限. 由給礦流量動(dòng)力學(xué)模型可知,給礦流量過程為一階線性過程,可以通過PI控制器實(shí)現(xiàn)穩(wěn)定控制,由泥漿高度動(dòng)力學(xué)模型可知,泥漿高度過程是以給礦流量為可測擾動(dòng)的一階線性過程,可以通過前饋與PI控制器實(shí)現(xiàn)控制,本文假設(shè)浮選過程的底層控制是穩(wěn)定的,給礦流量與泥漿高度可以穩(wěn)定地跟蹤設(shè)定值. 由動(dòng)力學(xué)模型式(3)~(5)可知,浮選過程的礦物過程是一個(gè)強(qiáng)非線性強(qiáng)耦合,且參數(shù)存在隨機(jī)變化的過程,因此,本文將礦物過程中的高階非線性與參數(shù)隨機(jī)變化等因素用未建模動(dòng)態(tài)表示,轉(zhuǎn)化為如式(8)所示的含有線性多變量與未建模動(dòng)態(tài)的模型,針對被控對象的近似線性模式設(shè)計(jì)反饋PID解耦控制器,利用未建模動(dòng)態(tài)前一拍可測的特點(diǎn),設(shè)計(jì)的反饋PID解耦控制器,設(shè)計(jì)數(shù)據(jù)驅(qū)動(dòng)的一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償PID解耦控制器,控制框圖如圖2所示.該控制器包括礦物品位控制器驅(qū)動(dòng)模型、PID控制器、反饋解耦控制器、未建模動(dòng)態(tài)補(bǔ)償器.設(shè)定值為目標(biāo)區(qū)間的中值,r*1=(Lcgmax+Lcgmin)/2,r*2=(Ltgmax+Ltgmin)/2. 圖2 數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償PID解耦控制結(jié)構(gòu)圖Fig.2 Structure diagram of data driven one-step optimal unmodeled dynamic compensation PID decoupling control 由式(8)可得,T?1時(shí)刻的未建模動(dòng)態(tài)v(T?1)為 由于v(T?1)可以由式(12)獲得,采用如圖2所示的數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制結(jié)構(gòu)對v(T?1)進(jìn)行動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制律,即 上式可化為如下形式: 其中,e(T)=r?(T)? r(T)為設(shè)定值與輸出之間的誤差,KP,KI,KD為對角常數(shù)矩陣,分別表示PID控制器的比例、積分和微分系數(shù)矩陣.,構(gòu)成數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制器,為關(guān)于z?1的多項(xiàng)式矩陣,為關(guān)于z?1的對角多項(xiàng)式矩陣,其中G(z?1)=(1?z?1)KP+KI+(1?2z?1+z?2)KD,H(z?1)=diag{1?z?1,1?z?1},Hˉ(z?1)為關(guān)于z?1的對角為零的多項(xiàng)式矩陣. 其中,?v(T)=v(T)? v(T?1)為未建模動(dòng)態(tài)的變化,為關(guān)于z?1的對角多項(xiàng)式矩陣,為關(guān)于z?1的對角為零的多項(xiàng)式矩陣,適當(dāng)選擇G(z?1)可以實(shí)現(xiàn)輸出r(T)對r?(T)的跟蹤;適當(dāng)選擇可以盡可能地消除耦合項(xiàng)對閉環(huán)系統(tǒng)的影響;適當(dāng)選擇可以盡可能地消除未建模動(dòng)態(tài)對閉環(huán)系統(tǒng)的影響. 為了求取控制律(14),引入如下性能指標(biāo). 其中,P(z?1),Q(z?1),R(z?1),K(z?1)為關(guān)于z?1的對角多項(xiàng)式矩陣,S(z?1)為關(guān)于z?1的對角為零的多項(xiàng)式矩陣. 引入廣義輸出?(T+1)為 定義廣義理想輸出??(T+1)為 廣義輸出誤差e?(T+1) 為 引入如下Diophantine方程 由Diophantine方程可知,使J最小的帶有未建模動(dòng)態(tài)補(bǔ)償?shù)囊徊阶顑?yōu)控制律為 將控制律(21)代入被控對象(8),可得 同時(shí)可得 對比控制律(21)與(14),引入對角常數(shù)矩陣 Π =diag{Π1,Π2}, Λ =diag{Λ1,Λ2}, Γ =diag{Γ1,Γ2},同時(shí),定義,. 選擇加權(quán)矩陣Q(z?1),S(z?1),K(z?1)為 通過選擇對角常數(shù)矩陣Π=diag{Π1,Π2},使得|z|>1時(shí),下式成立. 則系統(tǒng)是穩(wěn)定的[19],對比式(21),(23)和(24),可得 由定義(24)可知,控制律(14)滿足如下要求: 即實(shí)現(xiàn)了消除穩(wěn)態(tài)誤差、靜態(tài)解耦與未建模動(dòng)態(tài)的補(bǔ)償. 為了證明本文提出的數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制方法可以使閉環(huán)系統(tǒng)具有穩(wěn)定性和收斂性,引入引理1. 引理1.當(dāng)控制器(14)作用于被控對象(8)時(shí),被控對象的輸入輸出方程為 且有 顯然,被控對象的輸入輸出方程(28)與輸入輸出方程(23)等價(jià),用左乘控制器(13),代入被控對象(8),再利用偽交換矩陣,整理可得到式(29),利用文獻(xiàn)[20?22]的方法,可以證明式(30). 假設(shè)1.當(dāng)未建模動(dòng)態(tài)v(T)有界,且T→∞時(shí),v(∞)為常數(shù). 定理 1.在假設(shè)條件下.被控對象由式(8)表示,采用控制律(14),閉環(huán)系統(tǒng)的輸入輸出信號一致有界(Bounded input bounded output,(BIBO)穩(wěn)定),即 并且被控對象的輸出r(T)與參考輸入r?(T) 之間的穩(wěn)態(tài)誤差小于預(yù)先設(shè)定值ε,即 證明.因?yàn)槲唇?dòng)態(tài)v(T)有界,所以未建模動(dòng)態(tài)的變化?v(T)=v(T)? v(T?1)有界.由式 (24)和式(30)可知,輸入輸出閉環(huán)方程是穩(wěn)定的,r?(T)與?v(T)有界.則有 由v(T)與r?(T)的有界性,則存在正常數(shù)d1,···,d4.采用文獻(xiàn)[20?22]類似方法,可以證明 即滿足閉環(huán)系統(tǒng)的輸入輸出信號一致有界(BIBO穩(wěn)定). 由式(22),(24)~(27)可知,當(dāng)T→∞,礦物品位穩(wěn)態(tài)跟蹤誤差為 當(dāng)T→∞時(shí),v(∞)為常數(shù),即 則礦物品位穩(wěn)態(tài)跟蹤誤差為 為了驗(yàn)證礦物品位數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制方法的有效性,進(jìn)行如下對比仿真實(shí)驗(yàn). 針對礦物品位過程(3)~(5),選擇參數(shù)如下:物料交互速率系數(shù)為 浮選槽底面積與高度為 給礦礦漿的品位分別為 礦物過程的平衡點(diǎn)為 采樣周期為To=30 min,得到如下模型: 對比仿真實(shí)驗(yàn)中控制器參數(shù)設(shè)置如下: 1)PID解耦控制算法參數(shù)設(shè)置 權(quán)重矩陣P(z?1),Q(z?1),R(z?1),K(z?1)選擇如下,使其滿足式(24). 求解Diophantine方程,可得 2)模型預(yù)測控制算法中性能指標(biāo) 算法中預(yù)測步長為Np=5步,加權(quán)矩陣Q為單位矩陣,最優(yōu)化問題求解使用MATLAB中的quadprog函數(shù). 仿真實(shí)驗(yàn)中設(shè)定值目標(biāo)區(qū)間為 則選擇設(shè)定值為r?=[17.15,0.475]T. 針對文獻(xiàn)[15]中線性化之后的礦物品位線性模型,使用本文的PID解耦控制算法與模型預(yù)測控制(Model predictive control,MPC)算法進(jìn)行對比仿真實(shí)驗(yàn),結(jié)果如圖3~7所示. 從仿真結(jié)果可以看出,當(dāng)被控對象為線性模型時(shí),本文所提方法與文獻(xiàn)[15]中的模型預(yù)測控制方法都可以控制改變給礦流量與液位高度,使礦物品位跟蹤目標(biāo)設(shè)定值,其中模型預(yù)測控制方法的響應(yīng)速度更快,但是模型預(yù)測控制依賴于狀態(tài)反饋數(shù)據(jù),實(shí)際情況下,礦物過程的狀態(tài)是難以在線測量得到的,而本文的方法只需要輸出數(shù)據(jù)實(shí)現(xiàn)反饋控制. 圖3 線性模型下PID解耦控制的礦物品位跟蹤曲線Fig.3 Ore grade tracking curve with PID decoupling control under linear model 圖4 線性模型下PID解耦控制的控制輸入Fig.4 Control input curve with PID decoupling control under linear model 圖5 線性模型下模型預(yù)測控制控制的礦物品位跟蹤曲線Fig.5 Ore grade tracking curve with MPC under linear model 圖6 線性模型下模型預(yù)測控制的控制輸入Fig.6 Control input curve with MPC under linear model 圖7 參數(shù)擾動(dòng)曲線Fig.7 Parameter disturbance curve 為了驗(yàn)證本文方法的實(shí)際效果,使用文獻(xiàn)[15]中的非線性對象進(jìn)行仿真實(shí)驗(yàn),即浮選過程的模型(3),使用本文的數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制算法與模型預(yù)測控制(Model predictive control,MPC)算法進(jìn)行對比仿真實(shí)驗(yàn),同時(shí),考慮存在原礦品位參數(shù)ga的隨機(jī)的擾動(dòng),參數(shù)擾動(dòng)曲線如圖8~12所示. 為了評價(jià)本文的控制效果,引入絕對誤差積分(Integral absolute error,IAE)與誤差均方差(Mean square error,MSE)[23?26]來評價(jià)控制效果, 圖8 非線性模型下數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制的礦物品位跟蹤曲線Fig.8 Ore grade tracking curve with data driven one step optimal unmolded dynamic compensation PID decoupling control under nonlinear model 圖9 非線性模型下數(shù)據(jù)驅(qū)動(dòng)一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)腜ID解耦控制的控制輸入Fig.9 Control input curve with data driven one step optimal unmolded dynamic compensation PID decoupling control under nonlinear model 圖10 未建模動(dòng)態(tài)的值Fig.10 Value of unmolded dynamic 圖11 非線性模型下模型預(yù)測控制的礦物品位跟蹤曲線Fig.11 Ore grade tracking curve with MPC under nonlinear model 圖12 非線性模型下模型預(yù)測控制的控制輸入Fig.12 Control input curve with MPC under nonlinear model 公式為 評價(jià)指標(biāo)如表2所示. 表2 對比實(shí)驗(yàn)評價(jià)指標(biāo)Table 2 Performance index of comparison experiment 從仿真結(jié)果可以看出,當(dāng)被控對象為非線性模型時(shí),本文所提方法可以控制改變給礦流量與液位高度,使礦物品位跟蹤目標(biāo)設(shè)定值.文獻(xiàn)[15]中的模型預(yù)測控制方法無法根據(jù)反饋數(shù)據(jù)調(diào)整控制輸入,使礦物品位跟蹤目標(biāo)設(shè)定值.同時(shí),被控輸出與目標(biāo)值存在一定的余差,本文提出方法的評價(jià)性能指標(biāo)優(yōu)于文獻(xiàn)[15]中的模型預(yù)測控制方法. 本文提出的浮選過程數(shù)據(jù)驅(qū)動(dòng)的一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償PID解耦控制方法,由礦物品位控制器驅(qū)動(dòng)模型、PID控制器、反饋解耦控制器、未建模動(dòng)態(tài)補(bǔ)償器組成,實(shí)現(xiàn)了消除穩(wěn)態(tài)誤差、靜態(tài)解耦與未建模動(dòng)態(tài)的補(bǔ)償,單浮選槽為對象的仿真實(shí)驗(yàn)結(jié)果表明了該方法的有效性.
2 運(yùn)行反饋解耦控制器設(shè)計(jì)
2.1 浮選過程運(yùn)行控制策略
2.2 數(shù)據(jù)驅(qū)動(dòng)的一步最優(yōu)未建模動(dòng)態(tài)補(bǔ)償?shù)牡V物品位PID解耦控制算法








3 控制性能分析





4 仿真實(shí)驗(yàn)
4.1 仿真實(shí)驗(yàn)參數(shù)選擇



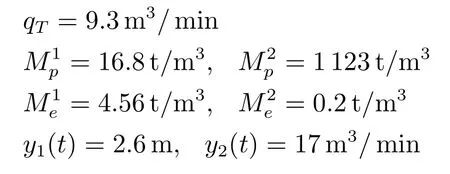
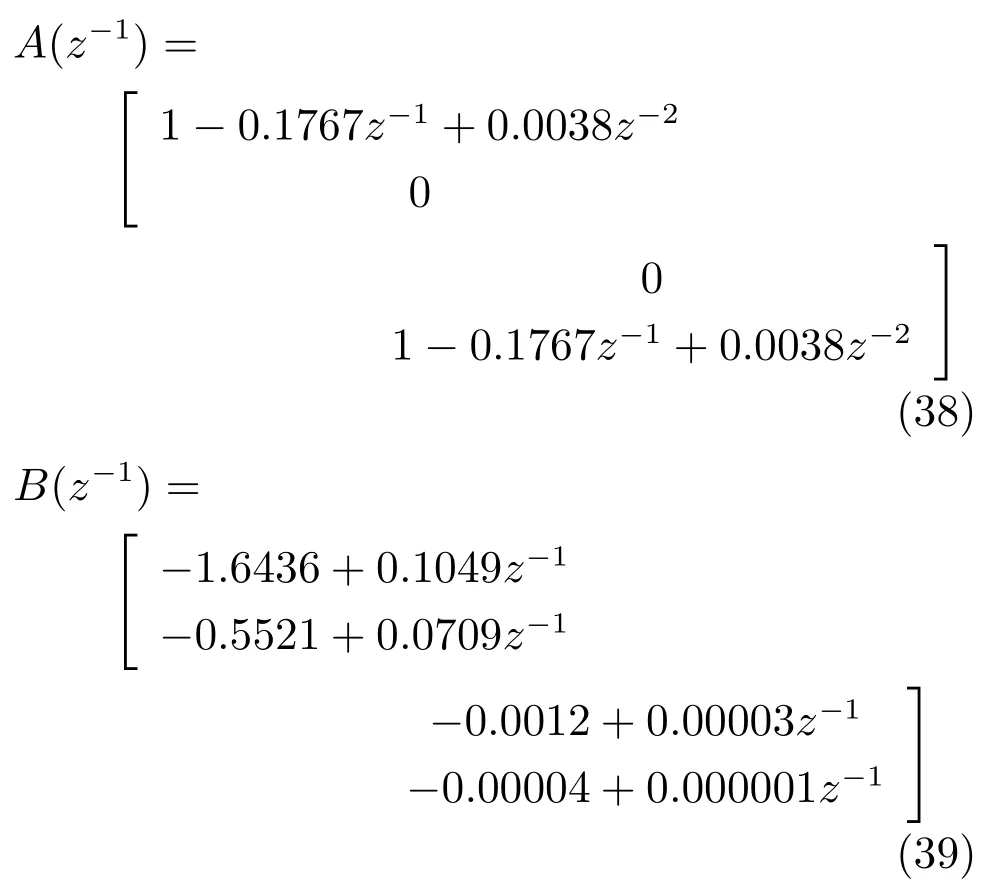
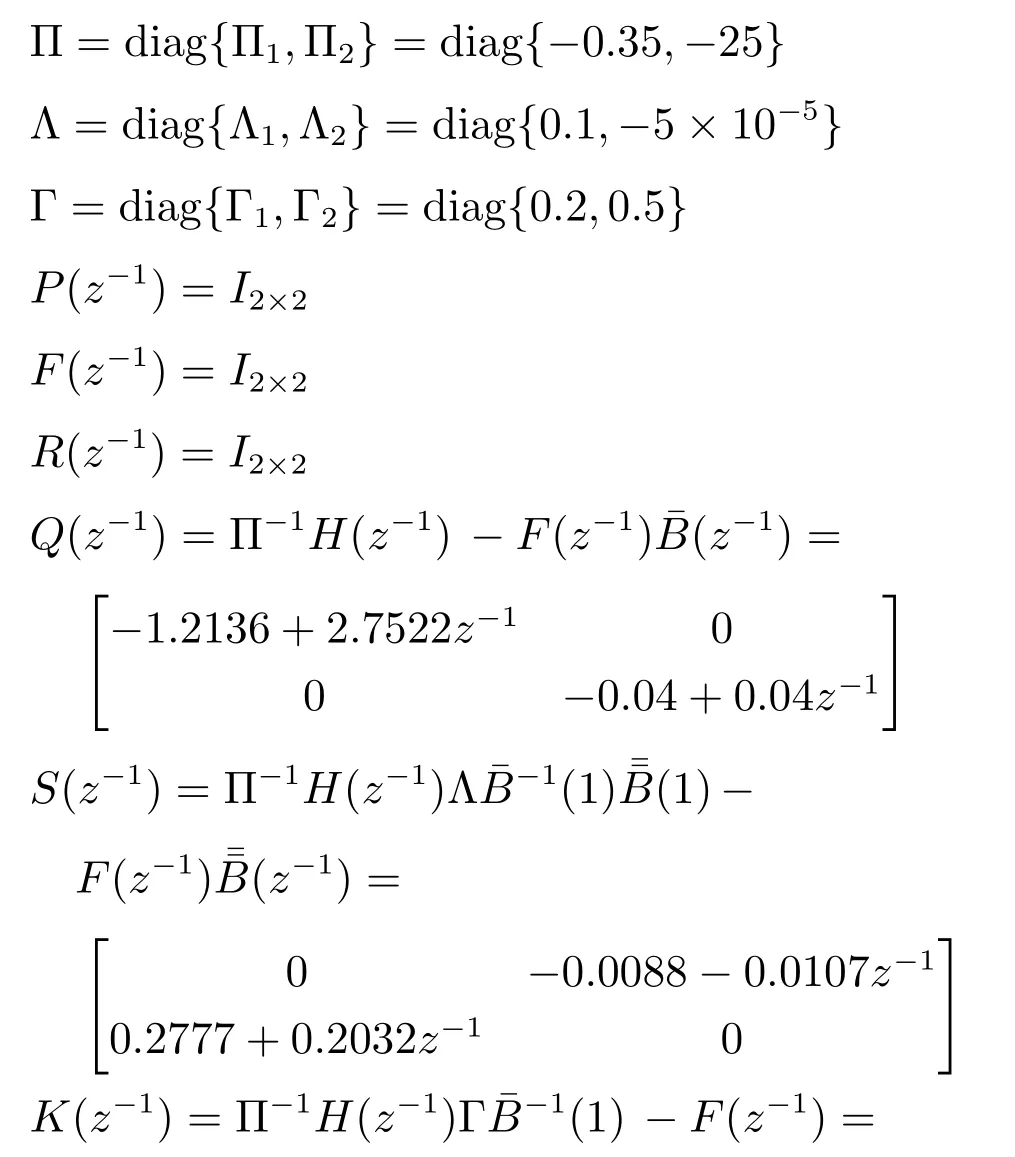

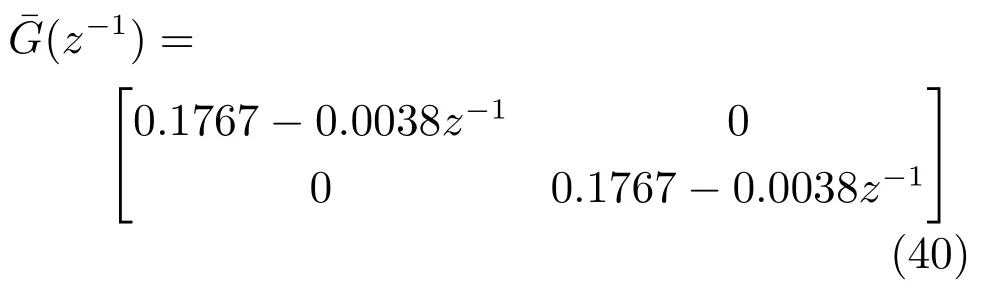
4.2 基于線性模型的仿真對比實(shí)驗(yàn)
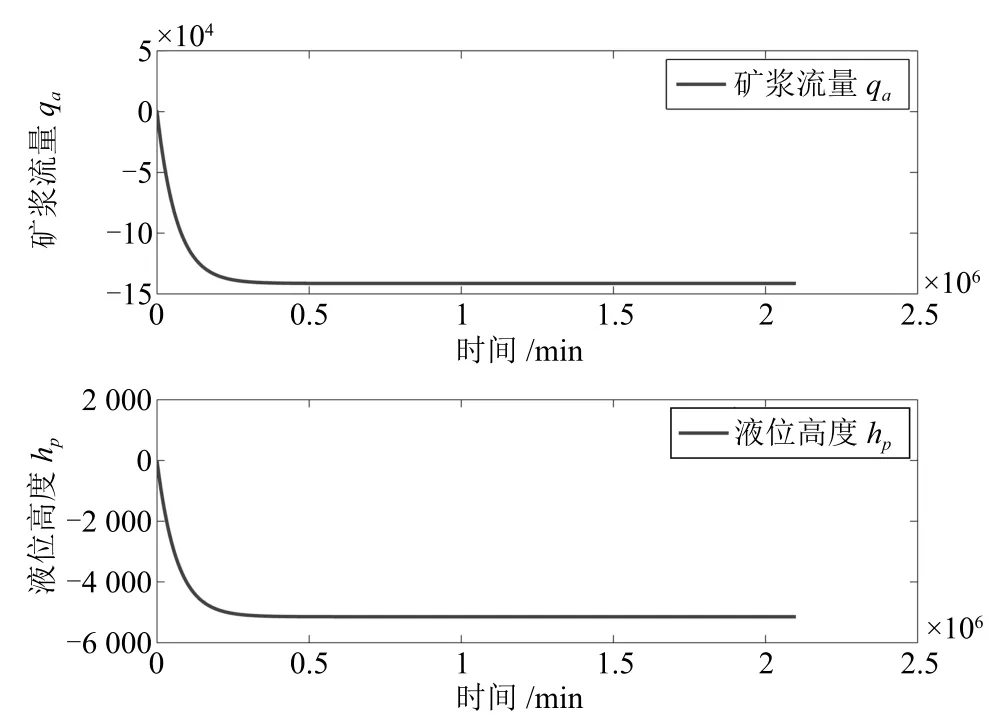
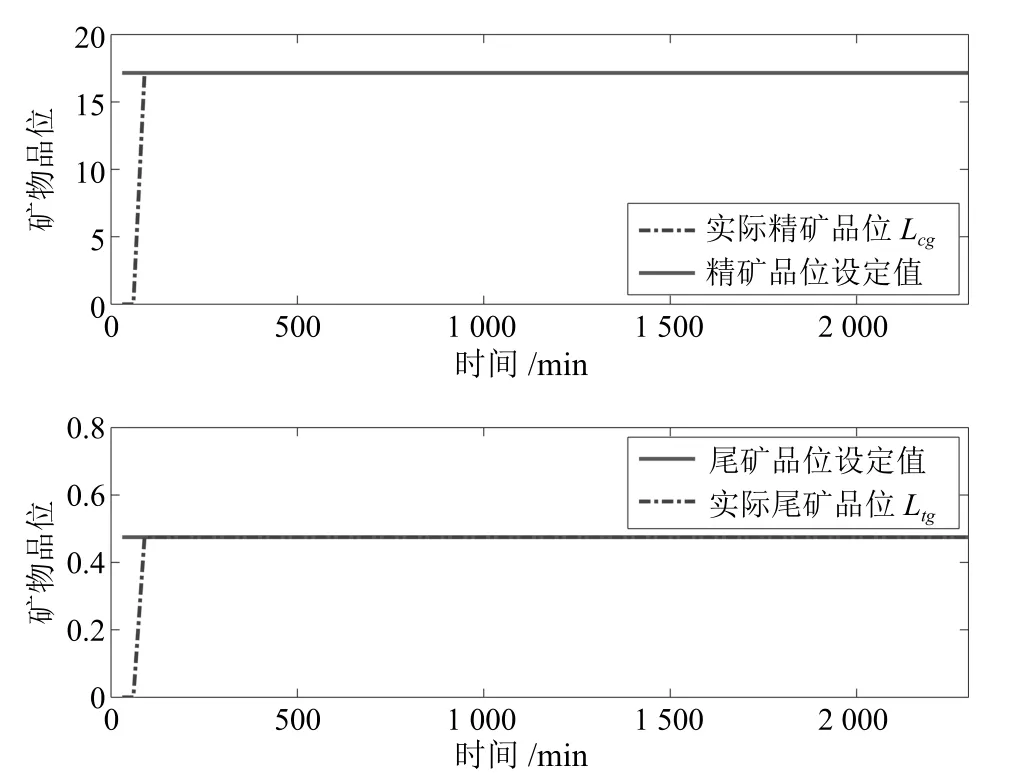
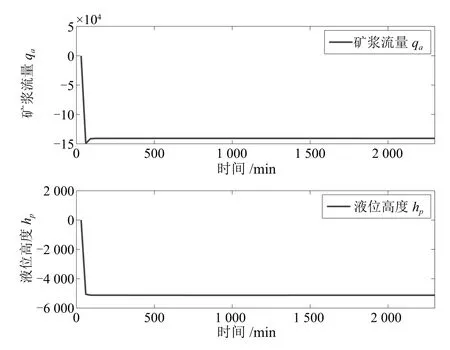
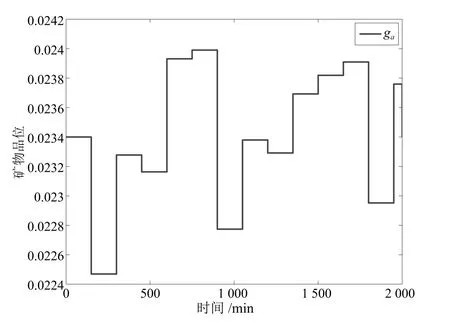
4.3 基于非線性模型的仿真對比實(shí)驗(yàn)
5 結(jié)論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
