三浮陀螺磁懸浮系統發展綜述
2019-06-26 07:04:04唐哲陳志豪
無線互聯科技 2019年7期
唐哲 陳志豪
摘? ?要:磁懸浮技術應用于機電陀螺直接改善了陀螺輸出軸的支撐環境,消除了浮子組件與陀螺殼體間的機械接觸,穩定了浮子質心位置,進而大幅度提高了液浮陀螺精度,優良的磁懸浮技術可使陀螺儀輸出軸上的干擾力矩降低10倍以上。三浮陀螺磁懸浮技術分為有源磁懸浮和無源磁懸浮兩類,文章在介紹磁懸浮系統的基礎上,較為完整地介紹了三浮陀螺及其磁懸浮系統的發展歷程。
關鍵詞:三浮陀螺;無源磁懸浮;有源磁懸浮
三浮陀螺儀是單自由度液浮積分陀螺的發展與改進,采用動壓氣浮軸承電機代替滾珠軸承電機,利用磁懸浮技術來消除機械摩擦力矩,提高了陀螺儀的壽命和精度。因為其浮筒采用了液浮技術、陀螺馬達采用動壓氣浮技術、輸出軸采用磁懸浮技術,所以簡稱為三浮陀螺。三浮陀螺精度高,通常應用于戰略武器、載人航天、星空探測等對陀螺儀精度要求非常高的領域[1]。按控制方式磁懸浮系統分為有源磁懸浮和無源磁懸浮兩類,本文對磁懸浮系統的發展歷程進行了介紹。
1? ? 三浮陀螺發展歷程
慣性技術與慣性元件的發展是相輔相成的,人類對陀螺儀的應用開啟了慣性技術的發展歷史。無論任何應用狀態和形式下的陀螺儀,決定其系統精度的關鍵因素都是陀螺漂移,而陀螺漂移由有害力矩產生,所以降低支承軸的摩擦力矩成為提高陀螺儀精度的關鍵。可以說傳統陀螺儀表的研制發展過程,就是想方設法減少其有害力矩的過程。為了降低軸承干擾力矩,支承技術不斷改進,歷經數十年發展,已從滾珠軸承發展為液浮、氣浮、靜壓液浮、撓性、磁懸浮、靜電懸浮等多種支承方式,就目前技術成熟度來看,精度最高并且應用最廣的還是液浮支承的慣性元件[2]。
20世紀50年代,美國麻省理工學院德雷帕學院[3]采用液浮支承,成功研制了單自由度液浮陀螺,有效降低了支承引起的摩擦力矩,使陀螺漂移達到了慣性級要求。1950年5月,美國北美航空公司奧托奈蒂克斯分公司成功研制了第一套純慣性導航系統XN-1,并在C47飛機上進行了試飛。1956年,開始使用鈹材料制造液浮陀螺的主要零件—浮筒,大大地提高了陀螺的穩定性。1958年,裝備了液浮陀螺慣性導航系統的核潛艇,從珍珠港出發,穿越北極冰蓋,最終到達美國波特蘭港,歷時21天。其中,穿越北極時以20海里的時速在水下潛航8 146海里,在即將到達目的地時潛艇浮出水面,經過測量,定位誤差僅為20海里,表明液浮陀螺慣性導航系統技術已比較成熟。20世紀60年代初,液浮陀螺電機轉子支承改用了氣體自潤滑動壓軸承,與滾珠軸承相比,既減小了機械噪聲,又大大地延長了陀螺的工作壽命。以美國為例,20世紀70年代初,三浮陀螺精度就已接近0.001(°)/h,20世紀70年代中期,為適應遠程MX導彈需求研制的TGG型三浮陀螺儀精度達到了1.5×10-5(°)/h,該陀螺儀用于浮球平臺上,使MX導彈的命中精度縮小到百米以內。另外,據稱其第4代三浮陀螺儀(FGG)精度已達1.5×10-7(°)/h,系統定位精度可以提高到3 cm/h,系統運行時間可達1萬小時,為最終實用型[4]。
2? ? 磁懸浮系統技術
磁懸浮按控制方式分為有源磁懸浮和無源磁懸浮,有源磁懸浮是連續地或斷續地測量物體的位置,通過伺服裝置迅速地控制力場,使懸浮體穩定在允許的位置范圍內。無源磁懸浮是通過調整磁懸浮的激磁電路參數來實現固有穩定。對于磁懸浮系統來說,無論是有源磁懸浮還是無源磁懸浮,所需的磁性元件是一致的,區別在于外接穩定電路。無源磁懸浮只需要外接幾個調諧電容,即可依據自身性質實現系統穩定[5]。
2.1? 無源磁懸浮技術
磁懸浮技術應用于陀螺儀的思想是20世紀五六十年代由美國德雷伯實驗室首先提出并付諸實踐的,在隨后的20多年中,受當時電子技術發展的限制,僅對采用電容協調原理、結構簡單的無源磁懸浮技術進行了研究,并廣泛應用于各類戰略領域。20世紀50年代末,美國的無源磁懸浮技術首先在北極星導彈用25IRIG液浮積分陀螺儀中得到應用,在用于Appollo計劃的RI-1170捷聯式陀螺中進一步應用,此外還有大力神ⅡC的輪盤木馬慣導系統中采用無源磁懸浮支承的單自由度液浮陀螺,民兵Ⅱ、Ⅲ導彈的擺式積分陀螺加速度表中,檢測質量采用無源磁懸浮系統支承,阿波羅登月艙用的16PIPA脈沖式加速度表中,檢測質量采用無源錐形磁懸浮系統支承[6]。
2.2? 有源磁懸浮技術
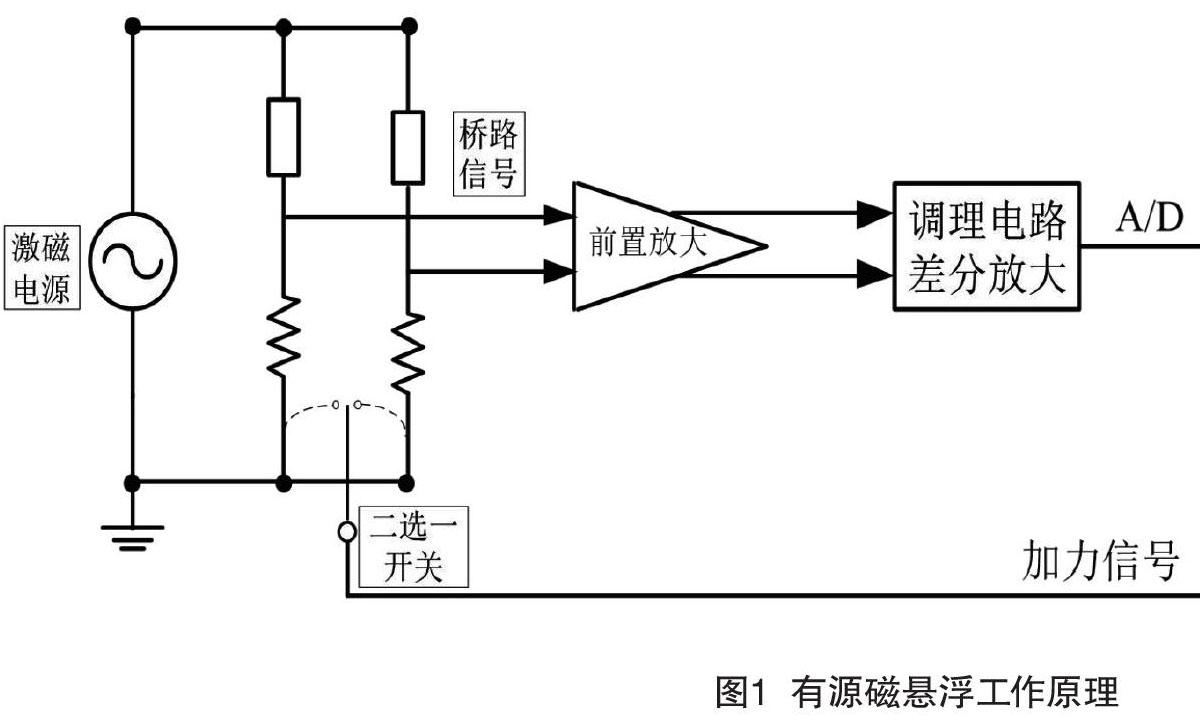
無源磁懸浮技術因其原理簡單、體積小,不需要專門的附件設備,只要對懸浮電路進行合理的調整就能達到自動穩定的效果,但無源磁懸浮恢復力和剛度則有所損失,啟動時長,功耗比較大。因此,自20世紀70年代開始,隨著電子技術的發展和電路集成度的提高,國外開始研究有源磁懸浮。20世紀70年代末80年代初,美國的新一代積分陀螺TGG和比例積分器SFIR-J中首先采用了有源磁懸浮技術,使儀表精度達到了1.5×10-5(°)/h和1.5×10-6(°)/h。美國第3、4代三浮陀螺,在輸出軸支承方面采用了時分式有源磁懸浮系統,應用結果表明該系統工作可靠,對提高儀表的性能起到了很好的作用。由此可見,有源磁懸浮更適于導彈、衛星等航天領域的三浮陀螺儀應用,尤其是隨著當代數字集成電路的飛速發展,有源磁懸浮已成為高精度慣性儀表磁懸浮控制系統的主流技術方案,其研制應用能夠進一步提高三浮陀螺精度和工作性能,從而滿足新型號研制任務要求。時分式有源磁懸浮的工作原理如圖1所示,硬件組成主要包括:浮子位置檢測電路(L-R電橋),前置放大電路,真有效值轉換電路,差分放大電路,A/D轉換電路,DSP控制器,D/A轉換電路,輸出驅動電路。
我國的有源磁懸浮系統發展歷程簡述如下。20世紀80年代,基本弄清了磁懸浮和慣性儀表的工作原理和匹配調試方案。20世紀80年代初期,進行了獨立式結構的相位反饋和幅值反饋磁懸浮研究,此種系統同一回路需要兩套磁懸浮元件,一套為位移傳感器,一套為力發生器,因而在小型化中受到很大限制。20世紀80年代中期,主要研究分時復用式直流幅值反饋有源磁懸浮系統,至20世紀90年代取得了一定的突破和應用。同期,基本掌握了三浮陀螺的機械加工、裝配和調試技術。隨后又討論了交直流型、純交流型、脈沖控制型等有源磁懸浮系統的設計與研究,并從三浮慣性儀表總體角度出發,研究了儀表有源磁懸浮系統的智能化數字控制及配表調試的有關理論和工程實現方法。鄧忠武[5]從三浮陀螺儀的總體性能出發,主要對三浮陀螺有源磁懸浮系統的設計重點及設計方法進行了研究。梁慧群[6]從磁懸浮有害力矩產生的機理入手,從系統總體方案設計出發,在硬件和軟件兩方面給出了磁懸浮有害力矩測試儀的研究設計過程,為磁懸浮有害力矩的測試提供了一種技術途徑。李德才等[7]基于有源磁懸浮系統的整體研究,提出了模糊控制和經典PID相結合的控制策略,并進行了MATLAB仿真研究,并提高了系統的魯棒性。
3? ? 結語
磁懸浮技術在三浮陀螺中的應用可以極大程度提高陀螺儀精度,以確保慣性平臺的可靠性。本文總結了三浮陀螺及其磁懸浮系統的發展研制歷程以及發展現狀,重點介紹了有源磁懸浮系統的工作原理以及硬件組成部分,有源磁懸浮因其獨特的優點稱為目前研究和應用的重點。作者簡介:唐哲(1994— ),男,陜西渭南人,碩士研究生;研究方向:慣性平臺儀器儀表科學與技術。
[參考文獻]
[1]吳遼.高精度三浮陀螺儀有源磁懸浮系統技術研究[D].北京:中航天科工第二研究院,2016.
[2]陸九元.慣性器件(上、下)[M].北京:中國宇航出版社,1990.
[3]DRAPER C S,W W.Inertial guidance[M].New York:Pergamon Press,1960.
[4]王巍.慣性技術研究現狀及發展趨勢[J].自動化學報,2013(6):723-729.
[5]鄧忠武.三浮陀螺儀有源磁懸浮技術研究[D].哈爾濱:哈爾濱工業大學,2003.
[6]梁慧群.磁懸浮有害力矩測試儀的研究[D].長春:長春理工大學,2011.
[7]李德才,王智奇,曾元鑒,等.模糊控制理論在有源磁懸浮系統中的應用[J].中國慣性技術學報,2010(2):214-218.