可翻轉座艙模塊機械手設計
2019-06-27 00:07:32何偉東韋震海覃海揮李瓊
科技創新與應用 2019年11期
何偉東 韋震海 覃海揮 李瓊
摘? 要:隨著汽車平臺化、模塊化的高度發展,汽車零部件集成度越來越高,各類模塊化總成的尺寸及重量也越來越不可控,導致助力機械手在汽車裝配中得到大量應用。座艙模塊作為最典型的模塊化產品,其輔助裝配機械手的設計及運用將極大影響生產節拍和裝配效率。文章結合總裝車間現場實際工況及車輛產品特性,系統地闡述座艙模塊機械手的設計思路和方法,旨在設計一款操作簡單、安全可靠、兼容性好、操縱輕便、成本低的座艙模塊助力機械手。
關鍵詞:模塊化;機械手;設計
中圖分類號:U463? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2019)11-0093-04
Abstract: The fast development of automobile platform and modularization has led to the integration of automobile parts, and the size and weight of all kinds of modular assemblies are becoming more and more uncontrollable, has which contributed to the extensive application of booster manipulator in automobile assembly. Cockpit module, as the most typical modular product, its auxiliary assembly manipulator design and application will greatly respond to the production beat and assembly efficiency. Based on the actual working conditions of the assembly workshop and the characteristics of the vehicle products, this paper systematically expounds the design ideas and methods of the cockpit module manipulator. The purpose of this paper is to design a cockpit module booster manipulator with simple operation, safety and reliability, good compatibility, light manipulation and low cost.
Keywords: modularization; manipulator; design
1 座艙模塊機械手的設計背景
汽車儀表板已有100多年的發展歷史了,最初的儀表板造型及結構單一,尺寸及重量問題還沒凸顯。[1]隨著汽車技術的不斷進步及人車交互越來越復雜,汽車儀表板的也變得越來越“擁擠”,[2]不僅集成了儀表板、儀表板支架、空調箱、組合儀表、轉向柱等的散件裝配,而且還加入了更多時尚的造型設計和智能功能,如抬頭顯示,多功能復合控制系統,聲音控制、警報及識別系統,駕駛員氣囊、副駕駛員氣囊、膝部氣囊等,形成了座艙模塊大總成。座艙模塊化裝配可以減少員工在車內裝配時間及彎腰動作、減少主線操作時間及工位數,減少總裝廠房占地面積和人員投資。基于座艙模塊的優越性,越來越多的汽車生產商都青睞于采用座艙模塊化。
2 座艙模塊機械手的運用
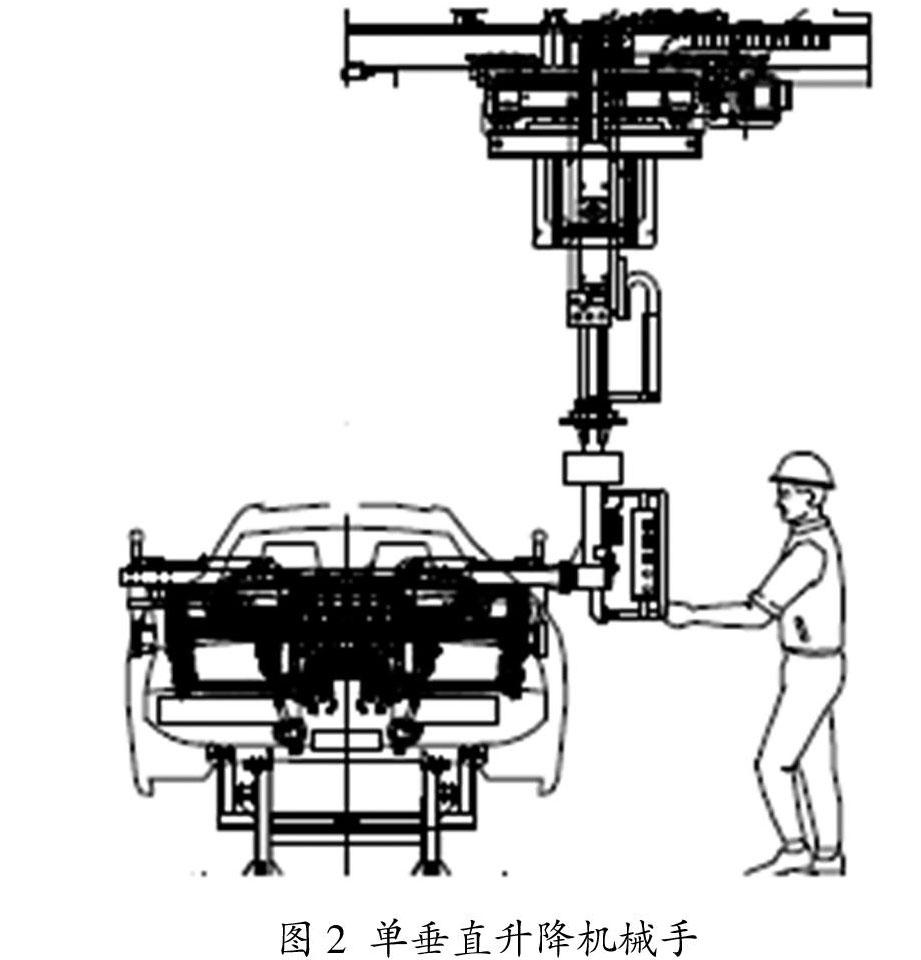
座艙模塊大總成不僅尺寸大,而且質量重,單人無法將座艙模塊總成搬運到車身進行裝配。這就需要一種安全高效的搬運工具輔助搬運及裝配。座艙模塊輔助搬運工具主要有助力機械手及工業機器人。因采用工業機器人集成夾具輔助裝配造價太高,使得普通助力機械手的應用有廣闊的發展前景。本文將探討座艙模塊機械手的設計及運用。國內常見的座艙助力機械手主要有以下多連桿多關節(如圖1)及單垂直升降兩種形式(如圖2)。
多連桿機械手因關節多,臂桿長,負載偏心大,裝配時人員推動機械手前進后退都很困難。單垂直升降的形式,人員使力點在運動主體中心,相比多連桿形式更省力,操縱更方便。本文將主要對單垂直升降助力機械手的設計進行闡述。
3 可翻轉的座艙機械手設計
基于汽車多樣造型帶來的門框大小不同及座艙模塊總成尺寸越來越大等影響,座艙模塊總成水平進入門框往往發生與門框干涉現象,這時就需要將座艙模塊翻轉一定角度送入車身。為提高不同車型不同座艙模塊總成的可兼容性,可翻轉式座艙機械手的設計尤其重要。本文以我司某車間X生產線為例,簡述可翻轉式座艙機械手的設計。
3.1 可翻轉座艙機械手設計思路及準備
3.1.1 可翻轉座艙機械手設計思路
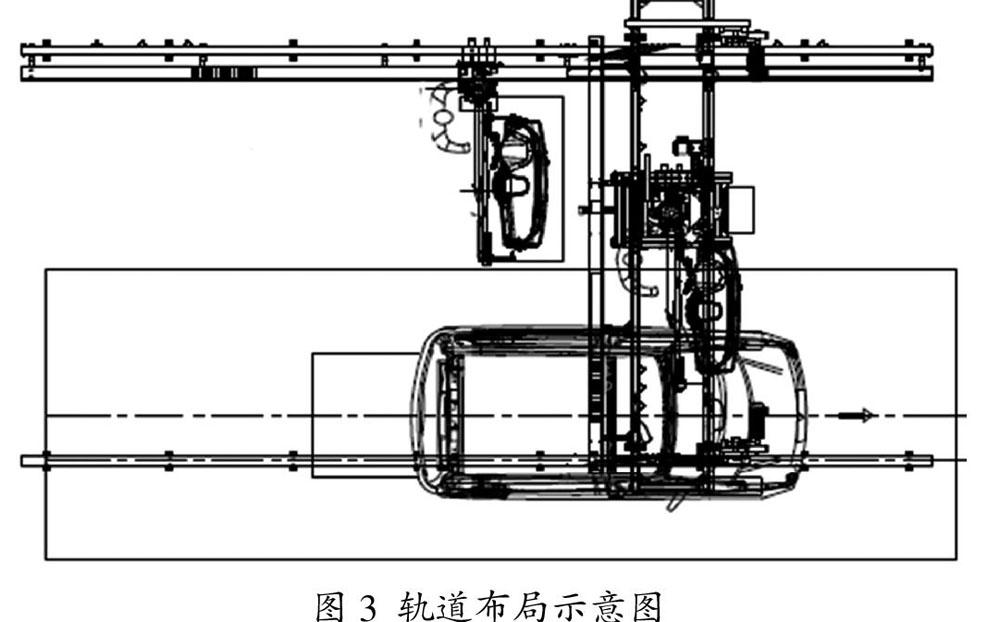
座艙在內飾線裝配,車身在滑板鏈運行,以內飾線主線運行方向為X向,垂直主線運行方向為Y向,則座艙能實現順利裝入車身需要X、Y兩個方向的運動軌跡,垂直升降機械手在Y向不可延長,故上層軌道的布局必須采用雙軌“#”字形布置。座艙模塊在高度Z方向運動的實現,有氣驅動及電驅動。電驅動設計較為復雜,成本高,故在高度方向上,升降系統采用結構簡單成本較低的升降主機(滑軌滑塊結構)及氣缸組合,采用壓縮空氣驅動。
座艙模塊放置在料架上由人工推送至工位線旁,因地面不可設置料架的導向及定位,無法實現機械手對座艙模塊的自動夾取。本次座艙機械手則采用最傳統的人工手動對孔,點按按鈕夾緊及上升。不同車型、不同座艙模塊,進車高度的不確定性需要人工能手動快速地微調進車高度,則機械手抬起后座艙模塊后通過點按按鈕實現負載平衡。裝配中需要座艙模塊實現前后俯仰平衡以便可前后微調裝入前圍上板對應的安裝板。負載平衡及夾具的俯仰平衡通過氣缸在氣路系統設計中實現。
為適應員工操作不及時的情況,座艙機械手可設置在X方向的快進、快退及自動返回功能以提高工作效率和降低部分勞動強度。機械手的快進、快退及自動返回功能可通過電機、變頻器、PLC、按鈕構成系統來實現。
3.1.2 可翻轉座艙機械手設計準備
座艙機械手設計的準備工作主要是前期的數據搜集,主要搜集的數據及用途如下:
各車型座艙模塊數模、左右側圍數模、前車體數模——用于機械手夾具設計、進車空間、安裝及退出全過程的校核。
各車型座艙模塊重量——用于升降主機及氣缸、伺服電機、軌道等計算選型依據。
各車型座艙模塊夾持孔間距——用于計算夾持孔間距差提供夾緊氣缸行程選型依據。
各車型料架夾持孔離地高度、各車型進車高度——用于計算升降主機及氣缸行程及型號選定。
取料區域及作業范圍——用于軌道系統布局設計。
3.2 可翻轉座艙模塊機械手詳細設計
一套完整的座艙模塊機械手主要包含有軌道系統、升降系統、夾具、電氣系統。
3.2.1 軌道系統設計
軌道品牌的選擇。軌道的主要作用是實現機械手的水平移動。國內常用軌道品牌主要有EEPOS、AMB、KBK等,EEPOS軌道摩擦系數小,250kg負載啟動推力僅為1.2~1.9kg,運行推力僅為1.0~1.9kg,在軌道行業中有出色表現并得到廣大用戶認可。為減輕操作人員移動機械手的推力,提高設備使用舒適度,本設計直接選定EEPOS品牌軌道系統。
軌道型號的選擇。根據計算,夾具、升降系統、滑動平臺、坦克鏈及其附屬件、電控柜等零部件總重量約200kg,儀表板模塊重量約45kg,則滑軌的載重要求大于250kg,預留一些未來儀表板的重量,最大總負載按300kg來設計軌道系統。根據EEPOS鋁合金軌道各型號參數,選擇M型鋁合金軌道作為沿生產線運行方向的固定軌,吊點距離3.5m。垂直生產線的移動軌,根據夾具取件區域及座艙模塊安裝到位距離,跨度為5.5m,選擇5.5m的L型軌道,加設加強軌確保軌道強度。選擇與相應軌道的行走滑車即可。如圖3所示。
3.2.2 升降系統選型
升降系統主要包含升降主機及升降氣缸。根據負載重量及裝配行程來選型。
座艙模塊為料架來料形式,各車型座艙模塊上夾持孔離地最低高度725mm,進車最高離地高度1493mm,升降行程需達到768mm,考慮其他因素影響,升降行程需做預留,故升降主機及升降氣缸按900mm的行程來選型。工廠氣壓一般為0.5~0.7MPa,負載重量按最大總重量300kg來選擇對應的氣缸及EEPOS標準型號中的中號兩級升降主機。選用標準產品可以縮短設備設計和制造時間,快速實現設備投放;同時標準設備結構經過長期驗證、非常可靠;在維修方面,備品備件易購買,維修便利。
3.2.3 夾具設計
夾具設計總體要求:
(1)結構簡單,可靠夾緊且不與座艙模塊總成任何部位干涉。
(2)夾具左右兩側可小幅度擺動,以便夾取座艙模塊和實車裝配。
(3)夾具前后可小幅度俯仰,以便夾取座艙模塊和方便座艙模塊對位安裝至車身。
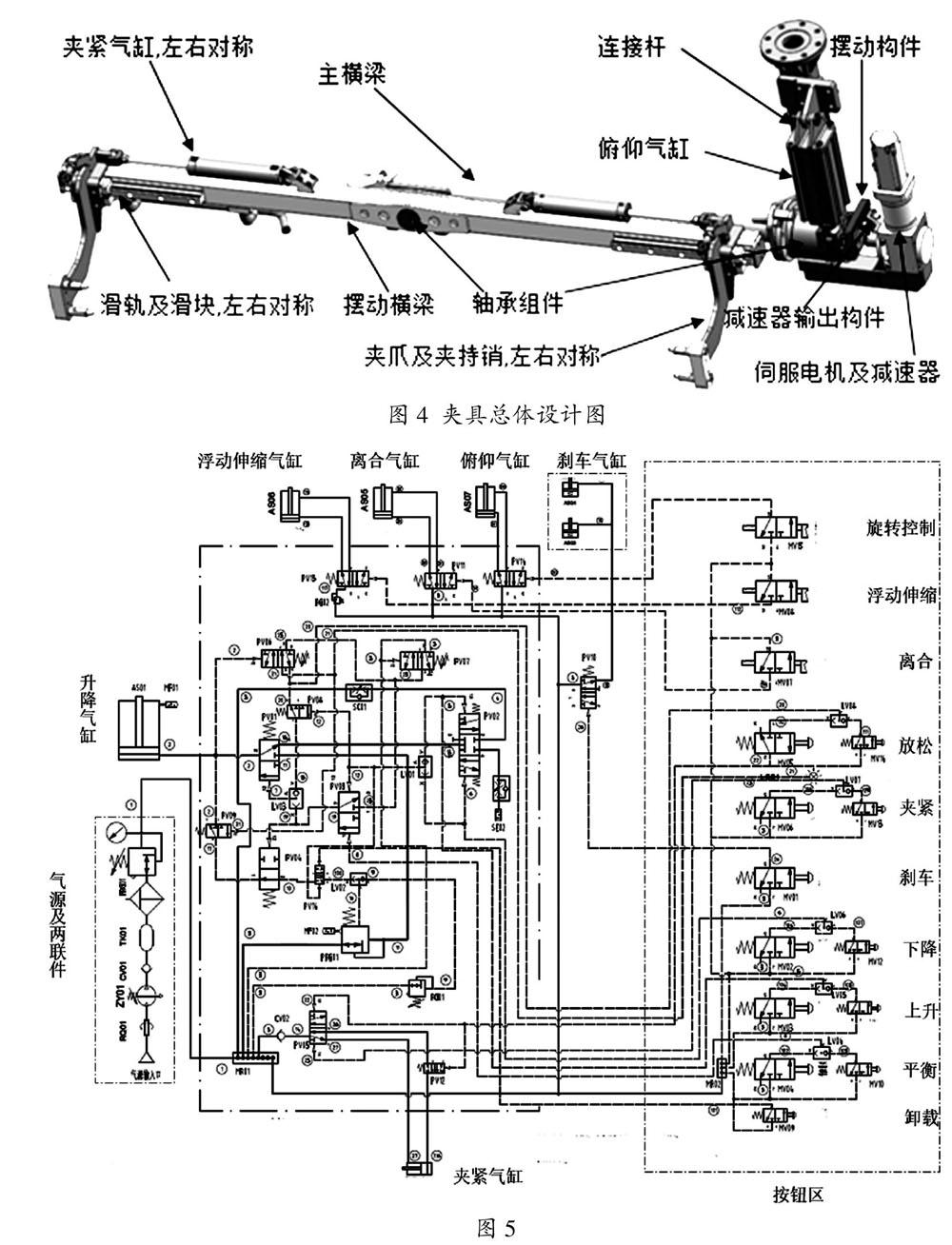
主夾具設計簡介。如圖4,夾持銷固定在夾爪上,夾爪固定在滑塊上,滑塊裝套入滑軌,滑軌固定在擺動橫梁上,夾爪端部與夾緊氣缸連接,實現對座艙模塊的有效夾緊。擺動橫梁通過軸承與主橫梁連接。在軸承組件下端兩側設計從主橫梁延伸出來兩個支撐板,支撐板與擺動橫梁留有一定間隙,支撐板上開有螺栓孔,裝入螺栓后調整螺栓端面與擺動橫梁的距離就可以調整擺動橫梁的擺動幅度。主橫梁通過軸承與擺動構件相連接,擺動構件一端與擺動氣缸連接,實現主夾具的旋轉及小幅度俯仰擺動功能。擺動氣缸固定在連接桿上,連接桿法蘭與升降系統連接。伺服電機及減速器固定在連接桿延伸桿上,減速器輸出構件與擺動構件位于同一平面上,用于推動擺動構件進行翻轉一定角度。
(1)夾具氣缸行程選擇:統計各車型座艙模塊兩端夾持孔距離,最小距離1280mm,最大距離1380mm,單邊行程差50mm。考慮夾具取料時避免劃碰傷零部件,夾爪打開寬度必須與座艙模塊總成留有一定的安全距離,氣缸行程可選擇150mm,按氣缸夾緊狀態夾爪距離1200mm,以擺動橫梁軸承位置為中心對稱安裝夾緊氣缸。
(2)夾持銷設計:各車型座艙模塊夾持孔徑均為Φ13.5mm,為方便進孔提高準確率,夾持銷頭設計為Φ13mm,端面設錐形導向,銷身設Φ22mm用于擋孔。
(3)翻轉動力驅動設計:翻轉動力來源于伺服電機,翻轉速度不宜過快,需增設減速器,達到降速并增大扭矩作用。伺服電機及減速器都有現成的產品可供選擇,通過計算座艙模塊及夾具的翻轉所需的扭矩來正確選擇伺服電機及減速器。
(4)其他輔助設計:輔助把手設置了X和Y兩個方向,Y向把手用于機械手夾緊座艙模塊和安裝中俯仰調整時的施力輔助;X向把手是用于推動機械手將座艙模塊送入
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年7期)2020-07-27 01:27:42
現代裝飾(2020年5期)2020-05-30 13:01:56
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
