小松自動(dòng)化機(jī)械手伺服控制
2019-06-27 00:07:32趙懿峰
科技創(chuàng)新與應(yīng)用 2019年11期
趙懿峰
摘? 要:自動(dòng)化傳送裝置對于壓機(jī)線來說,是體現(xiàn)整線技術(shù)能力的地方,同時(shí)它也決定了整條壓機(jī)線的運(yùn)行速度[1]。文章從自動(dòng)化控制入手,對小松自動(dòng)化做一個(gè)深入淺出的分析介紹,包括邏輯PLC、運(yùn)動(dòng)控制器、伺服等等。
關(guān)鍵詞:邏輯;運(yùn)動(dòng);虛軸;伺服控制;凸輪;實(shí)模式;虛模式
中圖分類號(hào):TG385 文獻(xiàn)標(biāo)志碼:A? ? ? ?文章編號(hào):2095-2945(2019)11-0108-02
Abstract: For the compressor line, the automatic transmission device is the place to reflect the technical ability of the whole line; at the same time, it also determines the running speed of the whole compressor line. Starting with automation control, this paper makes a simple analysis and introduction of Xiaosong automation, including logic PLC, motion controller, servo and so on.
Keywords: logic; motion; virtual axis; servo control; cam; real mode; virtual mode
緒論
縱觀國內(nèi)外壓機(jī)線生產(chǎn)廠商,除了壓機(jī)之間傳送采用機(jī)器人,無外乎都采用了不同形式的專用的自動(dòng)化傳送設(shè)備。如舒勒、濟(jì)二、小松等等。其中前兩家雖然結(jié)構(gòu)不一致,但無一例外采用了倍福、西門子、力士樂等控制系統(tǒng)進(jìn)行最終的設(shè)計(jì)與使用。唯獨(dú)小松還是采取了三菱的邏輯PLC和運(yùn)動(dòng)PLC的控制方式進(jìn)行控制,結(jié)構(gòu)簡單且運(yùn)行穩(wěn)定[2]。本文從軟硬件著手,對小松的伺服控制系統(tǒng)進(jìn)行結(jié)構(gòu)性分析介紹。
1 伺服控制結(jié)構(gòu)
1.1 PLC硬件架構(gòu)系統(tǒng)
整個(gè)控制系統(tǒng)采用雙CPU控制[3],一個(gè)用于邏輯運(yùn)
算,一個(gè)用于伺服程序控制,兩者各司其職,完成系統(tǒng)的控制。其中,邏輯PLC主要負(fù)責(zé)一般邏輯運(yùn)算,同時(shí)包括一些初始化數(shù)據(jù)的設(shè)定,以及伺服程序的調(diào)用。運(yùn)動(dòng)PLC,主要設(shè)定伺服驅(qū)動(dòng)器參數(shù)特性,同時(shí)根據(jù)運(yùn)算PLC的調(diào)用啟動(dòng)相應(yīng)的伺服程序。在整體架構(gòu)組態(tài)中,兩者PLC以及相應(yīng)的I/O模塊采用混編模式。整體來說一個(gè)邏輯PLC最多可帶3個(gè)運(yùn)動(dòng)PLC,實(shí)現(xiàn)1+3的模式,進(jìn)行伺服軸的進(jìn)一步擴(kuò)展。1.2 PLC軟件控制系統(tǒng)
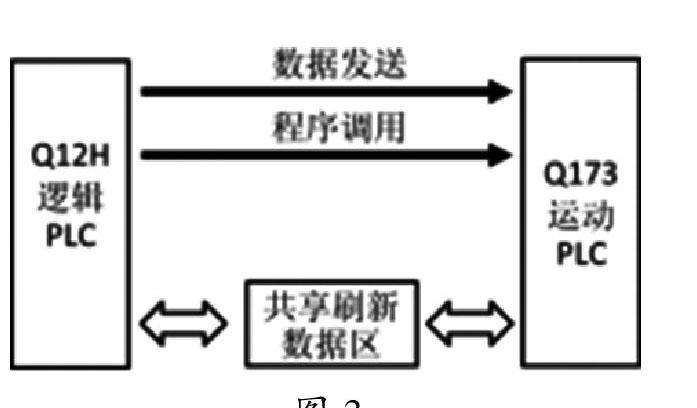
如前所述,邏輯PLC執(zhí)行邏輯運(yùn)算,運(yùn)動(dòng)PLC執(zhí)行伺服控制運(yùn)算[4]。兩者數(shù)據(jù)交換如圖3所述。在初始化等階段或者某個(gè)運(yùn)行操作前,邏輯PLC會(huì)通過指令形式將部分?jǐn)?shù)據(jù)寫入運(yùn)動(dòng)PLC內(nèi)部數(shù)據(jù)點(diǎn)。可以看出,這些數(shù)據(jù)只是一次性的按需寫入相應(yīng)的運(yùn)動(dòng)PLC內(nèi)部,在這完成后,邏輯PLC會(huì)發(fā)送一條指令來啟動(dòng)相應(yīng)的運(yùn)動(dòng)控制程序。這些數(shù)據(jù)實(shí)時(shí)性要求不高,也是單向的數(shù)據(jù)發(fā)送。對于兩個(gè)PLC之間,更重要的是共享刷新數(shù)據(jù)區(qū)。在這個(gè)區(qū)域內(nèi),邏輯PLC和運(yùn)動(dòng)PLC之間互相約定了一塊實(shí)時(shí)刷新的共有數(shù)據(jù)區(qū)。這樣,邏輯PLC內(nèi)部數(shù)據(jù)可以被運(yùn)動(dòng)PLC直接讀取,反正亦然,且實(shí)時(shí)有效。如邏輯PLC啟動(dòng)伺服程序后,相應(yīng)運(yùn)動(dòng)PLC的伺服程序首先對啟動(dòng)條件進(jìn)行判斷,當(dāng)判斷OK,則允許伺服程序執(zhí)行后續(xù)運(yùn)動(dòng)部分,并通過共享刷新數(shù)據(jù)區(qū)反饋啟動(dòng)運(yùn)行狀態(tài)。如果判斷伺服條件不滿足,則退出伺服控制,并反饋邏輯PLC退出狀態(tài)。
2 運(yùn)動(dòng)控制模式
運(yùn)動(dòng)PLC的運(yùn)行模式有2種,一種是實(shí)模式,另一種是虛模式[5]。所謂實(shí)模式,就是驅(qū)動(dòng)對象為實(shí)際控制的驅(qū)動(dòng)模塊,即相應(yīng)軸的伺服驅(qū)動(dòng)器帶動(dòng)的電機(jī),如圖4所示51號(hào)伺服程序,其涉及到1、7、9三個(gè)軸按既定程序進(jìn)行聯(lián)動(dòng),相應(yīng)的軌跡點(diǎn)、速度等通過變量進(jìn)行給定,通過不停的羅列運(yùn)動(dòng)指令,來完成預(yù)先設(shè)定的軌跡;而虛模式,即系統(tǒng)直接控制輸出的控制模塊并非實(shí)際意義上的驅(qū)動(dòng)模塊、伺服電機(jī),而是假象意義上的控制單元,這些單元本身并不存在,而是一些數(shù)字信號(hào)的組合。但是可以通過這些假想的單元按照某種關(guān)聯(lián)去間接驅(qū)動(dòng)設(shè)定好的實(shí)際物理意義上的伺服電機(jī)。這里所說的關(guān)聯(lián),便是小松程序里面用到的機(jī)械結(jié)構(gòu)程序。如圖5所示,虛15本身是一個(gè)虛擬伺服電機(jī),伺服程序按照要求對其進(jìn)行驅(qū)動(dòng),使得虛軸15的輸出軸按照既定要求進(jìn)行旋轉(zhuǎn)輸出,通過相應(yīng)的離合器的耦合將輸出軸信號(hào)傳遞到所需之處,圖中,軸1的實(shí)際輸入實(shí)際上是虛15和虛20兩個(gè)虛擬伺服電機(jī)運(yùn)動(dòng)的差動(dòng)合成,并通過帶動(dòng)的凸輪軸來驅(qū)動(dòng)實(shí)際關(guān)聯(lián)的物理輸出軸:其中,當(dāng)前進(jìn)給值=行程下限值+行程值*形成比這里的行程比來自凸輪的設(shè)定。
這樣,眾多實(shí)際的伺服軸可以按需協(xié)同同一個(gè)虛擬伺服軸來完成各自的一個(gè)復(fù)雜的運(yùn)行軌跡,從而滿足實(shí)際控制需求。
從中可以看出,實(shí)模式和虛模式使用在不同場合,虛模式更適合用在需要復(fù)雜協(xié)同運(yùn)動(dòng)的控制需求中。
3 自動(dòng)化控制程序
在了解了以上內(nèi)容后,我們可以來看一下系統(tǒng)所涉及到的程序部分。在這里我們可以把主要程序分成以下幾類:
A:自啟動(dòng)常駐內(nèi)存——隨PLC啟動(dòng)自己啟動(dòng),并常駐內(nèi)存運(yùn)行。
B:自啟動(dòng)中斷運(yùn)行——隨PLC啟動(dòng)運(yùn)行一次,隨后按中斷時(shí)間間隔運(yùn)行。
C:調(diào)用單次執(zhí)行——由邏輯PLC調(diào)用并運(yùn)行一次后退出。
D:調(diào)用常駐內(nèi)存——由邏輯PLC調(diào)用后常駐內(nèi)存運(yùn)行,直至條件不滿足退出。
E:調(diào)用中斷運(yùn)行——由邏輯PLC調(diào)用后按照中斷時(shí)間間隔運(yùn)行。
實(shí)際根據(jù)需要對程序特性進(jìn)行設(shè)定,之后可以對程序進(jìn)行編輯,設(shè)定程序的各項(xiàng)功能,比如由邏輯PLC直接調(diào)用的手動(dòng)程序,其可以利用實(shí)模式進(jìn)行編輯。或者通過模式切換將運(yùn)行模式切換到虛模式,通過啟動(dòng)虛擬主軸來帶動(dòng)我們需要的各個(gè)實(shí)際控制軸。4 結(jié)論
本文通過對整個(gè)系統(tǒng)的分塊介紹,使得大家對小松自動(dòng)化機(jī)械手的控制有了一定的了解,對小松自動(dòng)化系統(tǒng)整體框架有了一個(gè)初步的概念,包括硬件系統(tǒng)搭建,軟件集成等等,為后續(xù)的研讀打下了堅(jiān)實(shí)的基礎(chǔ)。
參考文獻(xiàn):
[1]王春生.沖壓工藝設(shè)備的技術(shù)進(jìn)步與發(fā)展[J].機(jī)械工人(熱加工),2006(12):10.
[2](日)小松產(chǎn)機(jī)株式會(huì)社.小松產(chǎn)機(jī)產(chǎn)品技術(shù)樣本[Z].2004.
[3]Q173CPU(N)_Q172CPU(N)用戶手冊-1410[Z].
[4]Q173CPU(N)_Q172CPU(N)SV13_SV22(運(yùn)動(dòng)SFC)編程手冊-1411[Z].
[5]三菱運(yùn)動(dòng)控制器SV22虛模式[Z].
