一種艦船軸頻電場實時檢測方法
2019-06-28 07:55:34張伽偉程錦房
數字海洋與水下攻防 2019年2期
李 越,張伽偉,程錦房
(海軍工程大學兵器工程學院,湖北武漢430033)
0 引言
傳統的艦船目標聲探測手段較為成熟,隨著減振降噪和電力推進技術的發展,再加上聲線彎曲等,限制了對水中目標的聲探測能力,所以尋找一種新的艦船信號源十分重要和迫切。艦船在海洋環境中引起的電場叫做艦船電場,腐蝕電流和由ICCPPCP系統產生的保護電流均會經海水從船殼流向螺旋槳,然后通過各種軸承、密封和機械線路從螺旋槳返回到船殼。此回路的電阻R會隨著螺旋槳軸承的旋轉而發生周期性的變化,使流經海水的電流受到調制,從而在艦船周圍產生以螺旋槳轉動頻率為基頻的時變電場信號,該電場稱為軸頻電場[1-2]。艦船軸頻電場是客觀存在的,不能徹底消除,是很難被隱身的艦船特征信號。國外早在20世紀60-70年代就進行了船舶電場的理論和試驗研究[3-6]。在國內,艦船電場近年來受到重視,以此為研究對象的各種項目工程也在進行[7-9]。
在利用軸頻電場信號對艦船進行檢測的過程中,總是會存在海洋環境電場信號的干擾。當干擾很小、信噪比很高時,傳統的基于時域特性的目標檢測方法能夠達到使用要求,如以電場模量、斜率、斜率比等為特征[10];但當干擾較大信噪比很低時,上述方法虛警率過高,無法有效檢測到目標。文獻[11-13]基于小波良好的時域局域化能力,在小波域中利用小波包熵、小波空域相關、小波模極大值能量等特征進行信號去噪和檢測,但小波類算法存在基函數選擇缺乏自適應性、降噪閾值設定不易和分解層數的確定經驗性強的缺陷。文獻[14]將經驗模態分解算法與4階累積量相結合,將其用于軸頻電場的檢測,利用前者的信號自適應分解能力和后者的抑制高斯過程的性質,取得了不錯的效果,但算法中的部分參數需要多次試驗才能確定,經驗模態分解也存在模態混疊現象。目標檢測的基本要求是在不虛警的情況下盡可能地提高檢測概率。考慮到上述原則和前人存在的問題,本文提出一種基于信號特征的艦船軸頻電場實時檢測方法,擬通過設定合適的閾值,適當放寬對疑似目標點的判決條件,然后通過電場模量判據、線譜倍頻判據、線譜穩定性判據對疑似目標點進一步判斷,在提高了檢測概率的同時又降低了虛警率,實現了低信噪比下對目標的檢測。與文獻[15]所用方法相比,本方法采用經典功率譜估計方法,運算速度較快;同時選用特征頻段內最大譜值為特征量,與選取平均譜值作為特征量相比,本方法更具有實時性;增加電場模量判斷對疑似目標點進行初篩,減少后續判斷運算量,有利于對信號進行實時檢測。
1 艦船軸頻電場的特征分析
對目標信號進行檢測的關鍵是在環境噪聲中提取目標信號的特征,信號特征的提取有賴于對信號及其環境噪聲的深入分析。
對1艘實測客船的軸頻電場信號進行分析,采樣頻率為20 Hz。圖1(a)為客船軸頻電場信號,圖1(b)為其頻譜圖。從圖中可以看出,時域上軸頻電場信號具有良好的區域性,成包絡對稱分布,其幅值量級足以被檢測到。頻域上軸頻電場信號表現為基頻及其倍頻的線譜。圖1(c)為分段滑動進行功率譜估計時,每段數據功率譜最大值對應的頻率,即最大能譜頻率。可以明顯地看到信號段最大能頻率穩定,且出現在基頻或其倍頻處,而環境信號沒有此規律。圖1(d)為客船通過時特征頻段內能量的變化。特征頻段內能量的計算方法是對信號進行功率譜估計,提取特征頻段內譜值的最大值。具體步驟:每次功率譜計算的點數為200個,即10s為1段,每次向前推進4 s進行計算。可以看到,艦船到來時,其功率譜最大值明顯增加。
圖1 艦船軸頻信號特征圖Fig.1 Characteristic diagram of ship’s shaft-rate signal
2 艦船軸頻電場信號檢測算法
艦船軸頻電場信號檢測方法是一種基于能量檢測的方法,主要通過對某一特征頻段內的電場軸頻信號功率譜最大值的實時跟蹤,可以對目標艦船是否存在做出初步判斷。當沒有艦船軸頻電場信號時,測量到的數據為環境電場數據,該特征頻段內的功率譜最大值變化較為平穩,譜值相對較小;當有艦船軸頻信號出現時,該頻段的功率譜最大值會顯著升高。因此,可通過設定閾值達到檢測艦船的目的。為了提高檢測率,另設3個判據進一步判斷。軸頻電場信號頻域表現為基頻及其倍頻線譜的形式,且基頻范圍大致確定,而且由于艦船正常航行時其螺旋槳的轉速恒定,所以基頻及其倍頻處的線譜位置穩定,對于近場而言,軸頻電場還具有一定的幅值[15]。以上述條件為判斷準則,檢測方法的實現步驟如圖2所示。

圖2 艦船軸頻電場檢測方法流程圖Fig.2 Flow diagram of detection method on ship’s shaft-rate electric field
檢測方法的具體實現步驟包括:特征頻段選取、功率譜估計、特征量計算、檢測閾值確定、疑似目標點確定、電場模量判斷、線譜倍頻判斷和線譜穩定性判斷。
2.1 特征頻段確定
不同類型艦船的螺旋槳轉速不同,范圍大致如表1所示。根據各種類型艦船槳速范圍確定對應的軸頻范圍為1~6 Hz,因為需要用倍頻信息進行倍頻判斷,所以特征頻段確定為1~12 Hz。

表1 不同類型艦船螺旋槳速度范圍與軸頻信息[16]Table 1 Propeller’s rate ranges and shaft-rate information of different ships
2.2 功率譜估計
對檢測時刻n以及之前的N-1個數據{x(n),x(n-1),…,x(n-N+1)}進行功率譜估計。算法的關鍵步驟是分段進行功率譜估計,要求譜估計必須對短序列具備高分辨率、周期偏移小的性能。以Fourier變化為理論基礎的周期圖法(直接法)和BT法(間接法),以及后面出現的 Bartlett法、Welch法和Nuttall法等改進方法統稱為譜估計的經典方法[17]。經典功率譜估計方法可以用FFT快速計算,且物理概念明確,是目前較常用的譜估計方法。本算法采用Welch法進行功率譜的估計,在其對數據分段時,允許每一段數據有部分的交疊,這樣段數增大,方差可得到更大的改善。同時,在使用漢明窗時可以改善由于矩形窗邊瓣較大而產生的譜失真。Welch法的詳細推導過程參見文獻[17]。
2.3 連續譜與線譜的分離
將特征頻段以外譜值置零。電場傳感器接收到的信號功率譜由線譜和連續譜組成,如果直接在含有連續譜的譜中提取線譜,由于連續譜的趨勢走向可能引起誤判和漏判,所以為了提取有用的線譜特征,需將連續譜進行剔除。本文將頻譜圖中慢變化分量(趨勢項)看成它的連續譜,輸入序列為頻譜采樣序列,采用具有線性相位的FIR低通數字濾波器將其濾出,在注意到濾波器有(N-1)/2個抽樣延時的情況下,有效地提取了其連續譜,實現了連續譜和線譜的分離。
2.4 線譜識別
對濾出連續譜的功率譜進行線譜識別。對文獻[18-20]提出的3種譜線識別方法進行分析比較后,決定采用文獻[18]的方法,通過尋找局部最大值點、譜寬度判斷和設置峰高門限進行線譜識別。
2.5 計算特征量
取線譜識別后特征頻段內的最大譜值為特征值Pn。
2.6 確定檢測閾值
提取特征量后,需要根據特征量來確定檢測閾值,首先計算n時刻前w段內特征量的平均值,PAve=(P1+P2+…+PW)/W是檢測時刻前一段時間內環境噪聲的平均。定義閾值為Tn=m×PAve,其中m為閾值因子。閾值Tn可以根據環境噪聲自動調節,當環境電場噪聲變化時,閾值具有自適應能力,所以是動態閾值。當環境噪聲很小,信噪比很高時,可以設定較高的閾值(m=4~5),可在不虛警的前提下較好地檢測到目標。但當海況較差信噪比較低時,就需要放寬判決條件,取較小的閾值,以免目標丟失,造成漏警。
2.7 確定疑似目標點
當n時刻的特征量Pn>PAve時,即判斷 Pn為疑似目標點。圖3給出了原理示意圖,t為時間軸,n為當前檢測時刻,N為求取功率譜的點數,w為求取閾值時需要用的平均特征量的段數,fs為采樣頻率。
圖3 艦船軸頻電場滑動檢測原理圖Fig.3 Schematic diagram of slide detection on ship’s shaft-rate electric field
2.8 電場模量判斷
若 max{|x(n)|,|x(n-1),…,|x(n-N+1)|}≥Th,則滿足電場模量判斷,繼續進行線譜倍頻判斷,否則對下一時刻重新檢測。其中Th為固定閾值,考慮到環境電場的大小,選取其范圍為5~10 μV。
2.9 線譜倍頻判斷
軸頻電場信號頻域表現為基頻及其倍頻線譜的形式,對疑似的目標點,計算其最大譜值處所對應的頻率點,分別計算其2倍頻處和1/2倍頻處的譜值P2和P1/2。 若P2≠0且P2≥0.5P或 P1/2≠0且P1/2≥0.5P,則滿足線譜倍頻判斷,繼續進行線譜穩定性判斷,否則排除是目標點的可能。計算時允許的誤差為1個頻率點。
2.10 線譜穩定性判斷
艦船在正常航行時其螺旋槳的轉速穩定,不會發生突變,所以其軸頻電場信號的基頻和倍頻穩定。而環境電場噪聲并不存在穩定的頻率,所以無此特點。可以根據這個特點來區分軸頻電場信號和環境噪聲信號。從時刻n開始,連續計算t秒時間內的特征量。若該段時間內的特征量對應的頻率點均與時刻n特征量對應的頻率點相同,或為其倍頻,則滿足線譜穩定性條件,最終判為目標點,否則排除是目標點的可能,進入下一時刻重新檢測。計算時允許的誤差為1個頻率點。
3 仿真驗證
用參考文獻[21]中的方法生成電場仿真數據。模擬航速為10 kn,水深為30 m,吃水為5 m,正橫距為30 m,生成理想的軸頻電場數據。為了獲得不同信噪比下對目標信號檢測的能力,對理想信號加上不同的白噪聲信號,生成仿真數據,對其進行驗證。艦船軸頻電場信號采樣率為20 Hz。
為了能夠分辨出基頻和倍頻線譜,分段求功率譜時FFT的長度不能少于1 s。用于功率譜估計的時間序列應該包含足夠的信息量,所以取時間長度為10 s,即N=200,每次向前滑動2 s進行計算。電場模量閾值設為5μV,線譜穩定時間設為6 s。閾值計算時,放寬對疑似點的判決條件,取較小的因子m=1.5,w=10。當n時刻特征值大于閾值時,n時刻判定為疑似目標點,之后再進行接下來的判斷,最終定為目標點。
圖4 SNR=10 dB時仿真信號檢測結果Fig.4 Detection result of simulated signal under SNR=10 dB
圖4-5是在不同信噪比下的仿真結果,圖中疑似目標點為○,最終確認目標點為Δ。從圖中可以看到,在較高信噪比時,出現的疑似目標點大部分為最終確認目標點。但隨著信噪比變小,軸頻電場信號被環境電場信號掩蓋,疑似點數量增多,出現了較多環境電場引起的誤動,但通過后來的3個判據,成功地檢測到了目標。
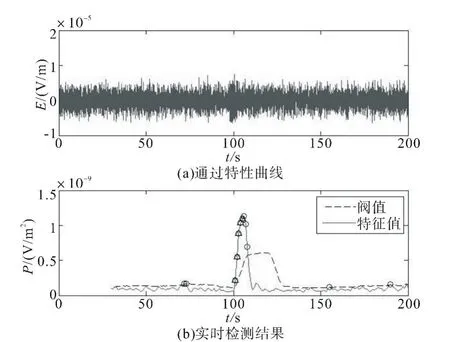
圖5 SNR=-2 dB時仿真信號檢測結果Fig.5 Detection result of simulated signal under SNR=-2 dB
4 算例
目標信號采用實測信號,目標艦船為某海域的某型輪渡,長度=186.2 m,寬度=24.8 m,吃水=5.8 m,標準排水量為15 000 t,目標航速14 kn,水深為30m。艦船軸頻電場信號采樣頻率為20 Hz。攜帶的電場傳感器由小艇布放,并通過水密電纜與艇上控制模塊相連。測量體布放于水深10 m處。
實測數據分為4次測得,分別取了不同海況及不同正橫距離下該型輪渡具有代表性的軸頻電場信號,如表2所示。圖6-9分別為不同情況下測量體采集到的目標艦船的軸頻電場通過特性曲線及其根據本文的算法得到的檢測結果。
圖中疑似目標點為○,最終確認目標點為Δ。從圖中可以看到,在海況相同測量距離不同時,隨著測量體與輪渡的距離增大,軸頻電場信號衰減較快;在測量距離相同海況不同時,隨著海況變得惡劣,環境噪聲對目標信號的影響加大,甚至掩蓋目標信號。低信噪比時,較低的閾值容易引起誤動,而較高的閾值又會造成漏警率增大。取其中50個航次的混合信號作為檢測對象,其不同信噪比下的檢測概率如表3所示。混合信號總體檢測率為96%,虛警率為4%,較好地實現了目標檢測。通過本文的方法,無需太高的檢測閾值,既排除了誤動又提高了檢測效率。
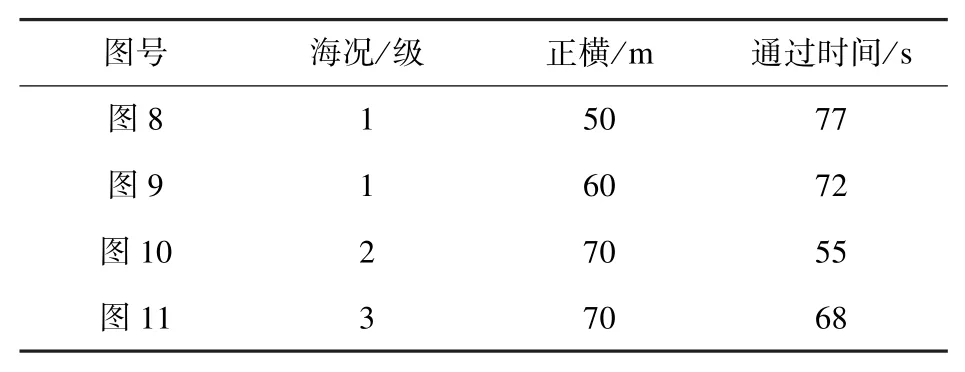
表2 數據采集環境Table 2 Data collection environment
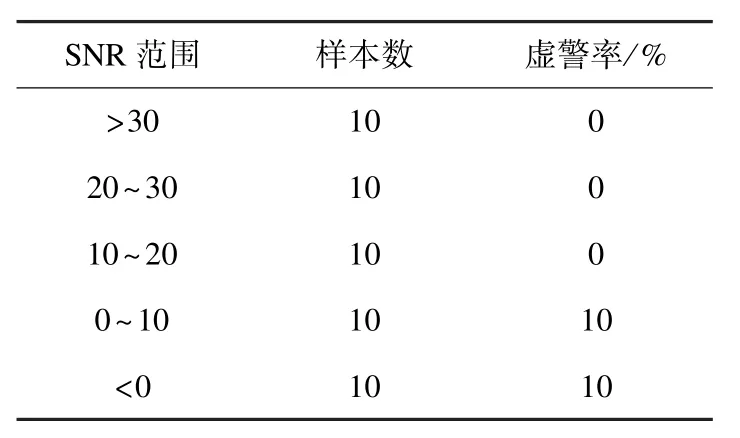
表3 不同信噪比下檢測概率Table 3 Detection probability under different SNRs
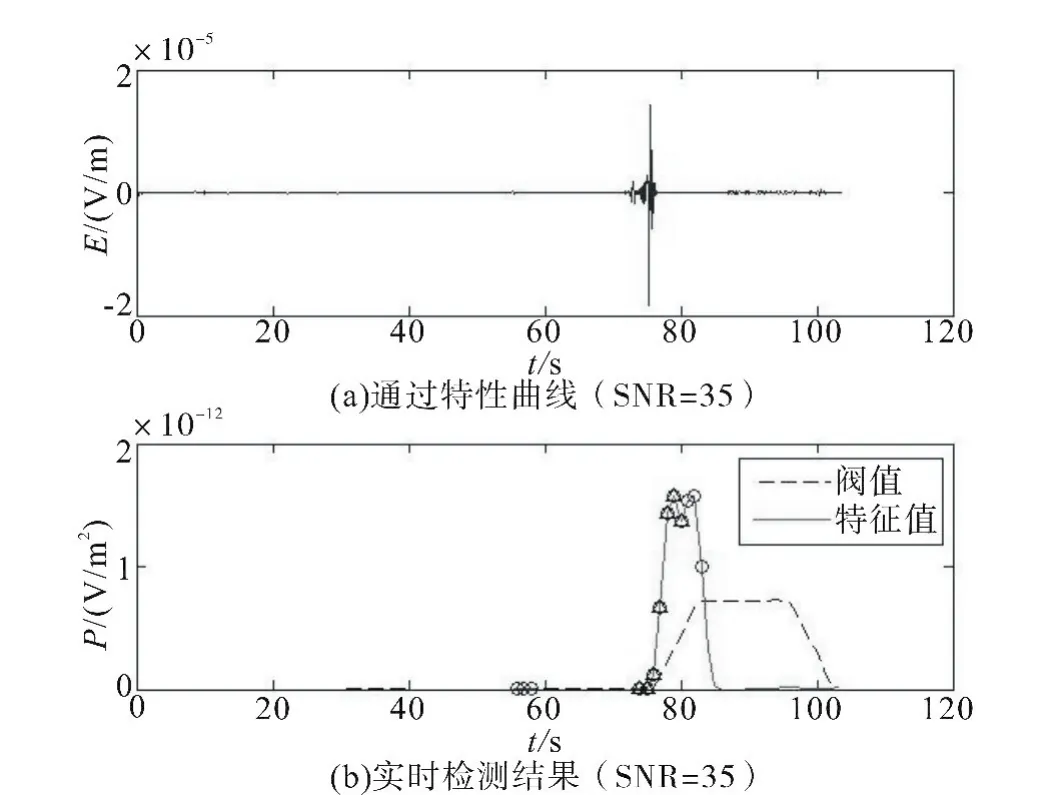
圖6 艦船軸頻電場信號實時檢測結果(SNR=35)Fig.6 Real-time detection result of shaft-rate electric field signal (SNR=35)

圖7 艦船軸頻電場信號實時檢測結果(SNR=30)Fig.7 Real-time detection result of shaft-rate electric field signal (SNR=30)
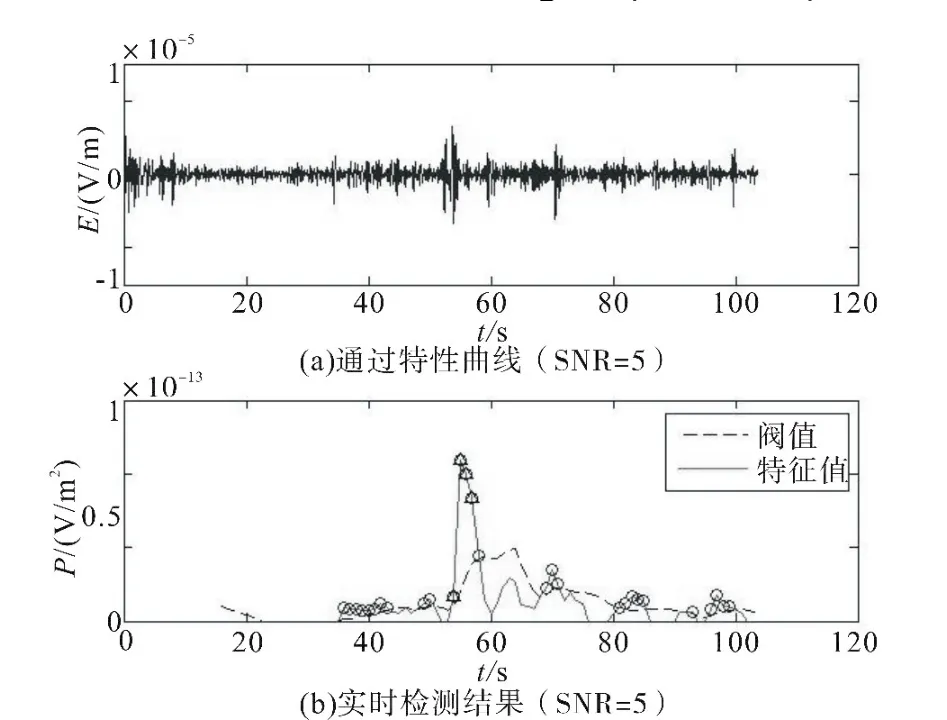
圖8 艦船軸頻電場信號實時檢測結果(SNR=5)Fig.8 Real-time detection result of shaft-rate electric field signal (SNR=5)
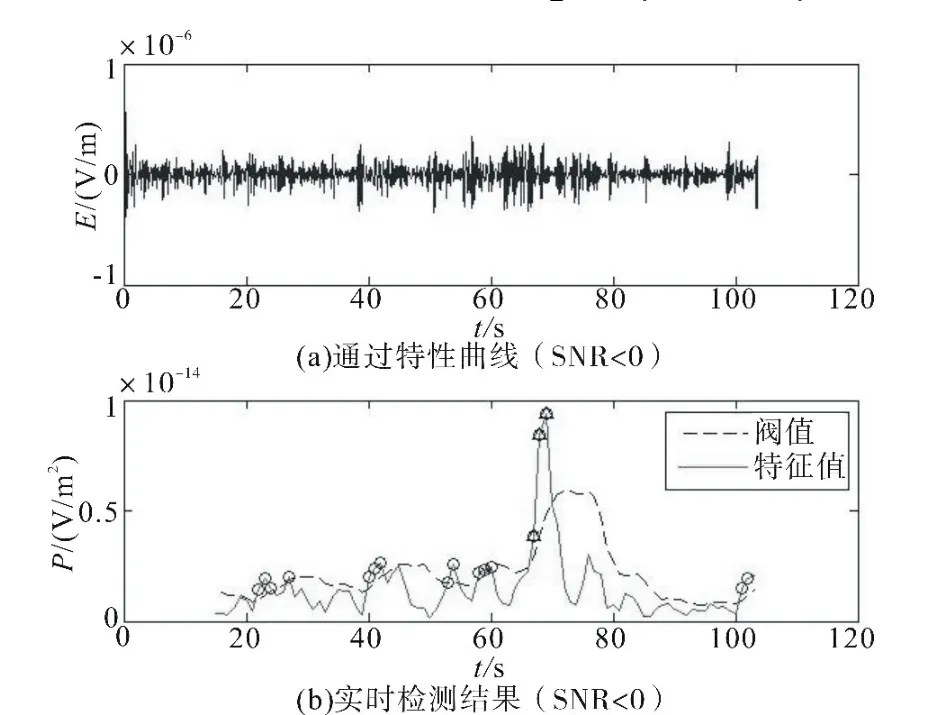
圖9 艦船軸頻電場信號實時檢測結果(SNR<0)Fig.9 Real-time detection result of shaft-rate electric field signal (SNR<0)
5 結束語
本文依據實測艦船目標的水下軸頻電場數據,對其進行了深入分析。針對軸頻電場信號及環境電場噪聲信號,提出了一種基于信號特征的艦船軸頻電場信號實時檢測算法。將經過線譜和連續譜分離及線譜識別后的功率譜估計的最大值作為特征量,將當前時刻前某段時間內的特征量平均值作為閾值,對信號進行了實時檢測,確定了疑似目標點。之后通過模量判斷、線譜倍頻判斷和線譜穩定性判斷,最終確定目標。對仿真信號和實測信號進行了檢測,在較低信噪比下實現了目標檢測。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12