空間光譜差比參量及其模擬應用
2019-06-28 08:13:40陳玉王欽軍
遙感信息 2019年3期
關鍵詞:特征
陳玉,王欽軍
(中國科學院遙感與數字地球研究所,北京 100094)
0 引言
遙感影像分析的目的是反映、解釋、量化與描述地表模式,如何從遙感影像的空間與光譜特征出發構建與現實地物相匹配的特征參量是遙感影像分析的關鍵[1-2]。多年來,地物的光譜特征參量(波形、特征吸收位置、特征吸收深度等[3-5]),空間特征參量(大小、形狀、紋理、位置、布局等[6-8])均已被有效應用于遙感影像分析中,并獲得了成功[9-11]。但是,隨著遙感影像空間分辨率與光譜分辨率的逐步提高,數據挖掘的廣度與深度也在不斷增強。有些特定領域的應用還需要通過進一步挖掘目標的空間與光譜信息,構建在其所在環境背景干擾下保持一定不變性的特征參量。比如熱液或油氣滲漏的蝕變暈,點源污染導致的植被脅迫長勢分帶等。該類對象具有環形分帶或漸變的特征,可表達為沿著某一位置向周邊或某一側,光譜特征呈現出有規律的變化。該類目標具有外源侵入的性質,而被侵入體類型多樣,形成不同背景干擾著該類目標的識別。由于該類目標的光譜特征及形狀多變,因而難以用傳統的空間或光譜特征參量來表達。
1 空間光譜差比參量的提出
對于該類目標對象,由于受到各種干擾影響,線性光譜混合模型有:
(1)
(2)
0≤fk i≤1
(3)
式中:Ri b為b波段第i像元的光譜反射率;fk i為對應于第i像元的第k個組分所占比例;Ck b為第k個基本組分b波段的反射率;n為像元i所包含的基本組分數目;εi b為誤差。為突出感興趣目標地物,將公式(1)進行變形有
(4)
Ri b-Rj b=f1i(C1i b-C1j b)
(5)
同樣對于其他波段b’有
Ri b′-Rj b′=f1i(C1i b′-C1j b′)
(6)
將公式(5)與公式(6)比有
(7)
公式(7)與地表干擾物的覆蓋組分無關,只與感興趣目標的空間光譜變化有關,該參量稱為空間光譜差比參量Vijbb’,即不同波段空間相鄰像元反射率差值的比值。
2 空間光譜差比參量的模擬應用
2.1 圖像模擬
以某類熱液蝕變為例,模擬存在如圖1(a)所示的熱液蝕變目標,其地表蝕變暈呈三層分帶特征,各分帶光譜特征曲線如圖1(b)所示(假設有4個特征波段)。目標物之外為取值0到1之間均勻分布的隨機像元。

圖1 某類模擬熱液蝕變目標圖像及光譜特征
對于這一目標對象,若不存在混合像元現象,可以采用多種方法直接識別出目標地物。但是自然界地物環境復雜,受地質環境影響,一些熱液蝕變目標在地表可能局部缺失、形狀各異。此外,由于受到不同地表覆蓋類型及強度的影響,這些目標的光譜特征會產生變異。為了簡化分析,我們以同一類型干擾物不同強度下影響為例,假定存在9個該類熱液蝕變目標均受到某一光譜曲線如圖2所示地表覆蓋的影響。該覆蓋物在9個目標中強度占比分別從0增加到80%。并且這9個目標形狀各異還有部分有缺失現象。模擬的4個波段在干擾下各波段圖像如圖3所示。為了考察算法去噪性能在模擬圖像中加入了0~0.1之間的隨機噪聲。
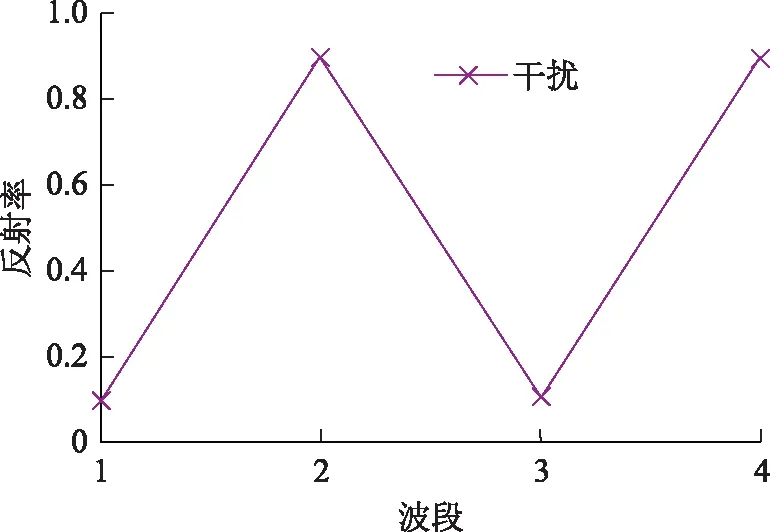
圖2 模擬的干擾地物光譜曲線

注:各個圖像上目標物從左到右,從上到下干擾依次占比以10%為梯度從0增加到80%。圖3 不同強度干擾下目標地物各波段圖像
2.2 傳統分類方法
采用傳統的監督分類的方法選擇圖1(b)的標準曲線作為參考光譜,并利用ENVI現有軟件分類功能,分別采用支持向量機法、光譜角填圖法、最大似然法、平行管道法、最小距離法、光譜信息散度法對目標按照分類的方式進行識別,結果如圖4所示。其中紅色、黃色、綠色分別代表識別出的目標物的內環、中環、外環。黑色表示不屬于目標地物。
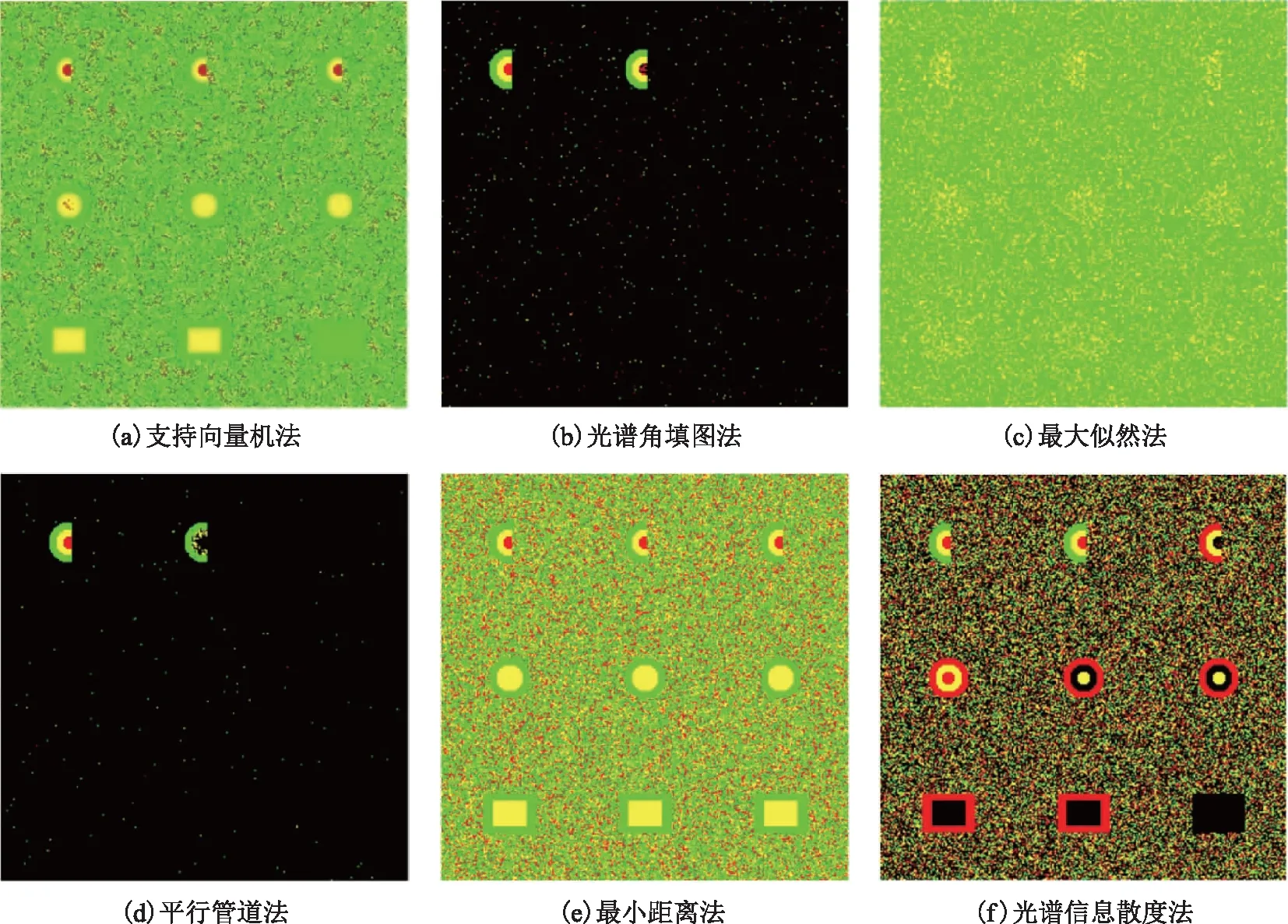
圖4 基于傳統各分類算法識別結果
2.3 利用空間光譜差比參量的方法
對于該類目標對象,在不同強度或類型的背景干擾下其空間光譜差比參量保持不變。由公式(7),對于這一目標對象,若不存在混合像元現象,可以采用多種方法直接識別出目標地物。但是自然界地物環境復雜,受地質環境影響,一些熱液蝕變目標在地表可能局部缺失、形狀各異。此外,由于受到不同地表覆蓋類型及強度的影響,這些目標的光譜特征會產生變異。為了簡化分析,我們以同一類型干擾物不同強度下影響為例,假定存在9個該類熱液蝕變目標均受到某一光譜曲線如圖2所示地表覆蓋的影響。該覆蓋物在9個目標中強度占比分別從0增加到80%,并且這9個目標形狀各異還有部分有缺失現象。模擬的4個波段在干擾下各波段圖像如圖3所示。為了考察算法去噪性能在模擬圖像中加入了0~0.1之間的隨機噪聲。
假設Vijbb′-(Rib-Rjb)/(Rib′-Rjb′)表示空間上相鄰i、j位置處光譜波段b、b’的空間光譜差比參量。以字母下標n代表內環,z代表中環,w代表外環,數字下標1~4分別代表相應的波段。Vnz12代表空間上內環與中環,波段1與波段2之間的空間光譜差比參量。可知對于圖1所示的模擬圖像有:Vnz12=(Rn1-Rz1)/(Rn2-Rz2)=-1、Vzw12=2/3、Vnz23=-2、Vzw23=-3/2、Vnz34=-1、Vzw34=-2/3這些空間光譜差比參量在9個目標地物中保持不變,與覆蓋物的強度與類型無關,可用于該類目標地物識別。為此設計的算法流程如圖5所示。首先進行圖像分割(分割過程中參數僅考慮光譜特性),然后,分別對分割后的圖斑計算其與相鄰圖斑的空間光譜差比參量,在滿足給定誤差限的情況下輸出匹配結果。圖6為圖像分割結果(借助eCognition軟件實現),最終識別輸出結果如圖7所示(基于ArcGIS二次開發實現)。
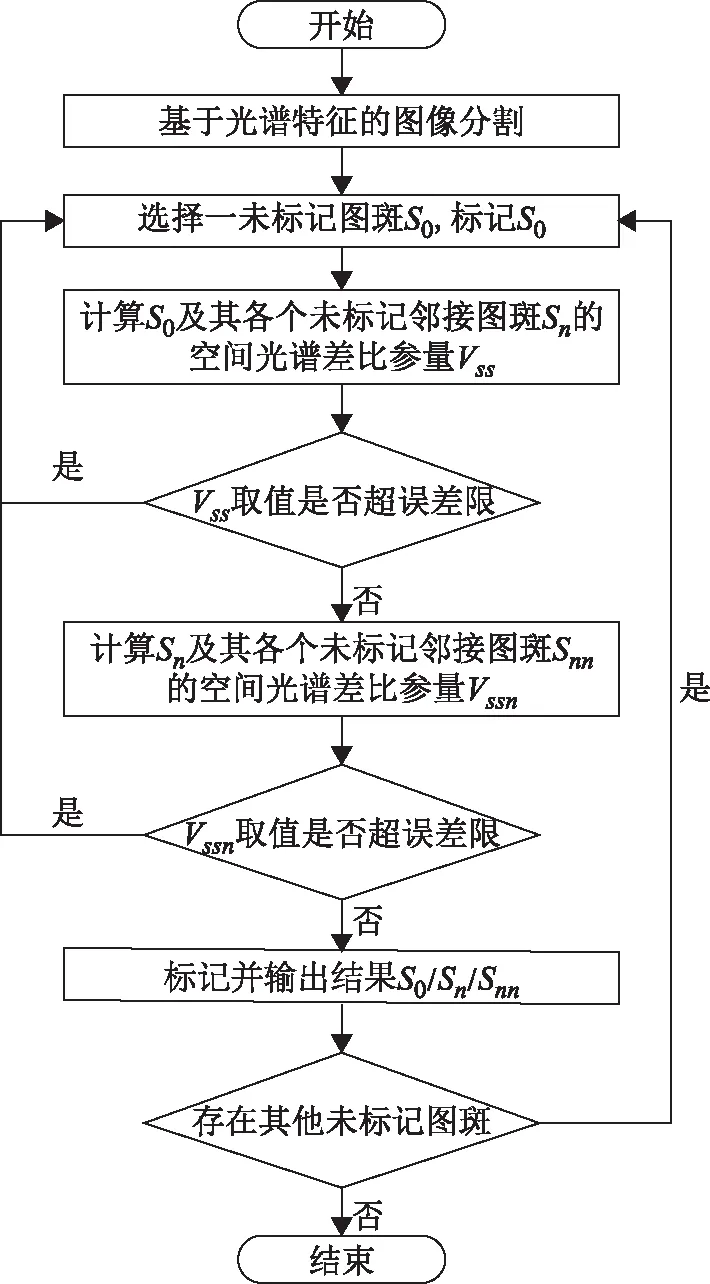
圖5 基于空間光譜差比參量的識別流程
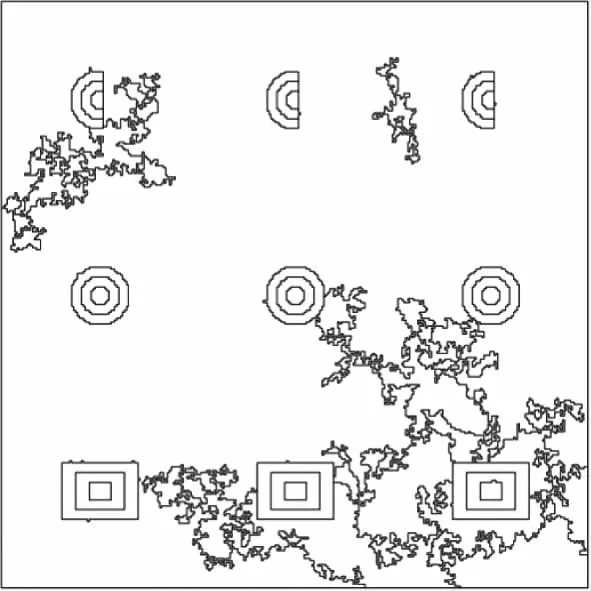
圖6 圖像分割結果
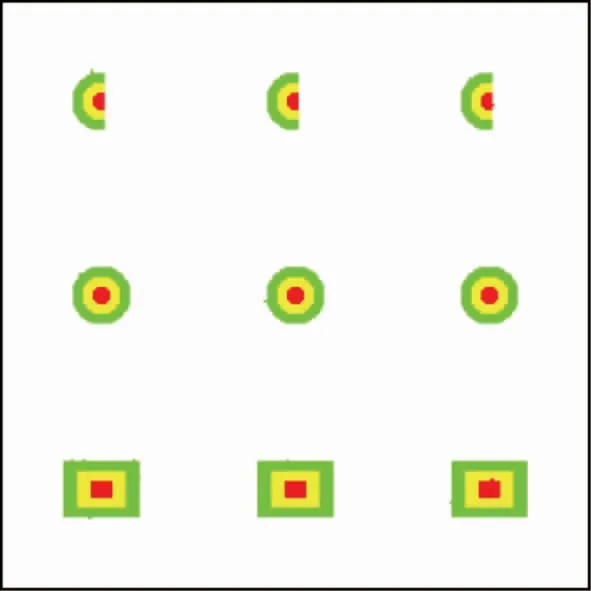
圖7 基于空間光譜差比參量的識別結果
2.4 精度評價
對比圖4及圖7各方法識別結果,采用整體精度及Kappa系數評價各分類方法(表1)可以看出,傳統的分類方法在背景干擾下均會出現識別出錯的情況,由于模擬圖像的波段設置問題,這種錯誤在不同的算法中有不同程度的體現。而基于空間光譜差比參量的識別方法有效消除了背景干擾,整體精度達到99.98%,Kappa系數為0.998,可以很好地將9個目標識別出來。

表1 各類方法分類整體精度及Kappa系數比較
3 結束語
本文通過理論分析與公式推導首次提出了空間光譜差比參量的概念,該參量可有效用于表達光譜特征隨空間呈現規律性變化的一類地物。基于模擬圖像,利用該參量構建的識別方法總體識別精度達到了99.8%,大大高于傳統方法。本次實驗方法是在圖像分割的基礎上,以圖斑為單位開展算法設計。實際上,也可不經過圖像分割以像元代替圖斑開展應用,但是算法的時間與空間復雜度均大大增強,且誤差限的設計需要更具有靈活性,這些有待后續進一步的深入研究。此外,該參量也具有一定的局限性。首先,在公式推導過程中假設了臨近的像元受到的干擾類型及強度差異遠小于距離較遠的像元,該假設要求背景干擾在單個目標物范圍內應該保持盡可能一致,對于不一致的情況則需要我們進一步抽析出其中不變的特征參量。其次,該參量在推導過程中忽略了誤差項,誤差項對結果的影響隨著臨近圖斑光譜反射率差值的增大而減小,這就提醒我們在利用該參量時選擇光譜隨空間變化較大的特征波段組合效果更佳。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38