船舶航向模糊控制器優化設計及仿真*
2019-07-01 06:26:52甘浪雄周春輝程小東
武漢理工大學學報(交通科學與工程版) 2019年3期
甘浪雄 鄧 巍 周春輝* 程小東
(武漢理工大學航運學院1) 武漢 430063) (內河航運技術湖北省重點實驗室2) 武漢 430063)
0 引 言
隨著海上“絲綢之路”經濟帶的開通,我國航運貿易進一步發展,船舶的大型化、高速化及智能化趨勢明顯.船舶航向控制作為船舶智能化控制的重點與前提,一直都受到國內外相關學者的廣泛關注.由于船舶的運動具有非線性、時變不確定性及時滯性等特點,船舶的航向控制實質上是一種非線性控制的過程.船舶航向控制器研究初期,采用PID(proportion integration differentiation)控制來實現船舶航向的控制,傳統的PID航向控制器具有控制穩態精度高的優點,但是難以滿足非線性系統控制要求,且其PID參數調節與整定過程較為復雜.隨后模糊航向控制器因其動態性能好、穩定性強、對非線性系統控制能力強等優點而被廣泛使用,但是其仍然存在控制精度不足,模糊規則的計算復雜性隨著輸入輸出增多而增大等缺點[1-2].
目前國內外相關學者有關模糊PID控制的研究較多,王鴻健[3]在傳統PID 控制的基礎上利用模糊控制器動態調節PID控制參數Kp,Ki,Kd,使得航向控制效果得到了一定的改善,并提升了控制器的抗干擾能力.楊世勇等[4]在對模糊控制以及PID控制進行對比分析的基礎上,提出了一種模糊PID復合控制器,控制器根據輸入偏差范圍自動切換控制模式,控制性能較好,精度較高.Savran[5]設計了一種新的多變量預測模糊比例積分微分(F-PID)控制系統,采用預測控制動態調節F-PID控制器參數,并通過在線訓練以提高預測精度.仿真表明,該控制系統具有自適應、抗噪聲,以及抗干擾性.陳小強等[6]結合模糊控制、PID控制和預測控制各自的優點,利用模糊控制對PID控制器的參數進行在線調節,同時引入預測控制達到提前調整的目的,設計了適合高速列車速度跟蹤控制的預測模糊PID控制器.劉軍等[7]采用一種利用變寬度與變形狀的隸屬度函數構成的模糊規則的模糊PID 控制器,實現了對轉子系統的非線性恢復力的處理和非線性振動的完全控制.以上文獻均驗證了模糊PID控制器在非線性系統中進行控制的可行性.
針對船舶航向控制缺乏前饋調節的問題,利用航向成形算法對初始航向以及目標航向進行運算處理,當航向偏差角度較大時,采取較大的轉向角速度以縮短轉向所需時間;當航向偏差角度較小時,則采取較小的轉向角速度以控制船舶能夠精確達到設定航向.基于船舶航向控制器模塊,結合模糊控制器與PID控制器的優點,設計了調節系統控制量的模糊PID控制器(Fuzzy-PID控制器),Fuzzy-PID控制器根據航向偏差范圍選擇利用模糊推理的方法或PID控制來實現系統控制,具有良好動態性能和較高的控制精度.在航向成形算法進行航向前饋調節的基礎上,利用不同控制器在MMG模型下進行仿真分析,通過仿真結果驗證了航行成形算法進行轉向前饋調節的可行性及有效性,通過比較傳統PID控制器、模糊控制器以及Fuzzy-PID控制器結果得出了Fuzzy-PID航向控制器的優越性.
1 船舶航向控制系統結構
在船舶航向控制系統中,首先輸入初始航向及目標航向,利用航向成形函數計算并輸出成形航向i.然后將航向偏離值ψr作為船舶航向控制器的輸入變量,控制舵角δ的變化;最后將舵角δ輸入到MMG船舶運動模型實現改變船舶航向.船舶航向控制系統結構圖見圖1.
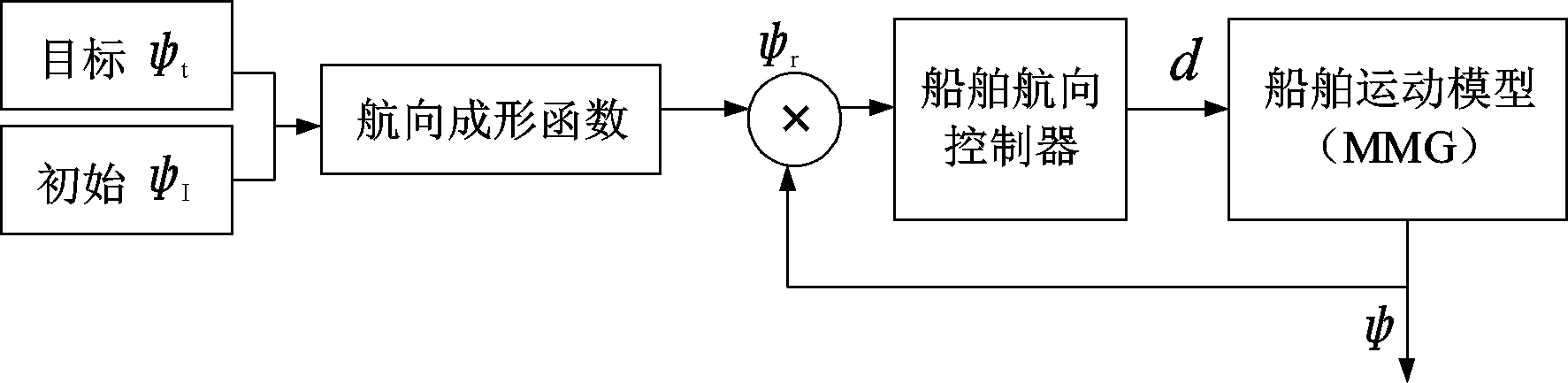
圖1 船舶航向控制系統結構圖
1.1 航向成形函數
船舶在實際轉向操作過程中,當航向偏差角度較大時,通常需要采取較大的轉向角速度以縮短轉向所需時間;當航向偏差角度較小時,則通常采取較小的轉向角速度以控制船舶能夠精確達到設定航向,因此,轉向角速度可以設置為
rd=aerfa×rmax
(1)
式中:aerfa據航向改變量確定的相應轉向角速度權重,具體確定數值見表1.
在船舶轉向過程中,轉向速率會受到舵角的影響,船舶的轉向速率與舵角關系為
r=K·δ
(2)
式中:r為船舶轉向速率;K為野本模型中的增益系數;δ為舵角.
由此可計算出船舶舵角為35°時的轉向角速度rmax為0.514(°)/s.
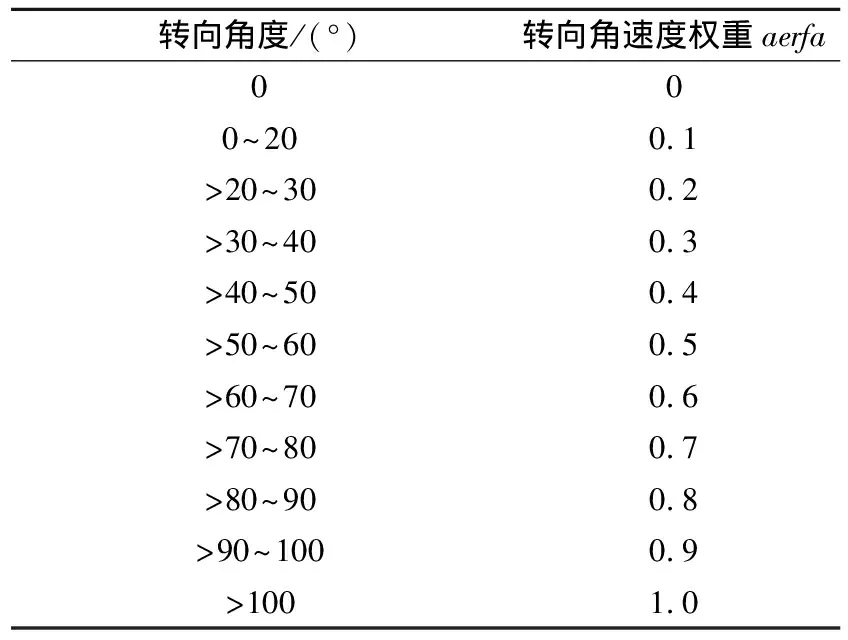
表1 轉向角度與轉向角速度權重對應表
1.2 分離型船舶運動模型
船舶操縱運動數學模型分為整體型模型、分離型模型以及響應模型三種.其中,分離型模型可以利用目前已發表的試驗數據進行計算,對于不具備試驗手段的研究者,利用該建模方法也可以構建精度較高的船舶運動模型,故選取分離型船舶運動模型進行船舶運動模型建立與仿真.
分離型數學模型主要是指MMG模型,是日本數學模型建模小組(manoeuvring mathematical model group,MMG)于20世紀70年代末提出[8],也是目前國際上比較流行的一種船舶運動數學模型.該模型是船舶整體型模型的簡化,考慮了船、槳、舵的相互影響,它強調各個水動力導數的物理意義,剔除了一些由模型試驗結果表明不重要的水動力導數[9].
采用隨船坐標系,隨船力矩計算為
(3)
式中:m為船舶質量;u為船舶前進速度;v為船舶橫移速度;r為船舶轉首角速度;Izz為船舶繞z軸的慣性矩;xc為船舶中心在坐標系中x軸坐標值;下標H,P,R分別表示船體、螺旋槳和舵;X,Y,M分別表示船舶沿x,y軸受力,以及船舶沿z軸力矩,由于螺旋槳的橫向力YP及其對船重心的力矩MP很小,可以不考慮.
1) 慣性水動力和力矩 船舶在理想無限流場中運動時,會產生流體反作用于船體的慣性流體力.在船舶運動研究中,通常將其簡化為船體的附加質量與附加慣性矩[10].
(4)
(5)
(6)
式中:L為船長;B為船寬;d為船舶吃水;Cb為船舶方形系數.
2) 黏性水動力和力矩 所采用的黏性水動力計算參照文獻[8]中井上模型與貴島模型相關的計算公式進行計算.
3) 螺旋槳推力 MMG模型中螺旋槳推力計算模型為
XP=(1-tP)ρn2DPKT(JP)
(7)
式中:tp為拖船螺旋槳推力減額分數;ρ為水密度;DP為螺旋槳直徑;KT為螺旋槳推力系數;JP為進速;n為螺旋槳轉速.
4) 舵力和力矩 MMG模型中舵力和力矩計算模型為
(8)
式中:FN為垂直于舵葉平面的正壓力;tR為舵力減額分數,估算公式為(1-tR)0.738 2 -0.053 9Cb+0.1755Cb2;αH為操舵誘導船體橫向力修正因子;xH為操舵誘導船體橫向力作用中心到船舶重心距離.
2 船舶航向控制器設計
2.1 航向模糊控制器
模糊控制器(fuzzy controller)是一種語言控制器,針對系統的模糊特性如不完全性、不確定性以及非線性等,通過模擬人的控制經驗與策略,對一些難以利用數學模型精確描述的過程進行控制,基本結構包括輸入變量的模糊化、模糊算子的應用、運用模糊蘊涵進行模糊推理、模糊結果的聚類以及反模糊化[11].
航向模糊控制系統中,利用航向偏離差值e以及差值變化率ec作為輸入變量,利用其控制船舶舵角的變化.模糊控制器結構見圖2.
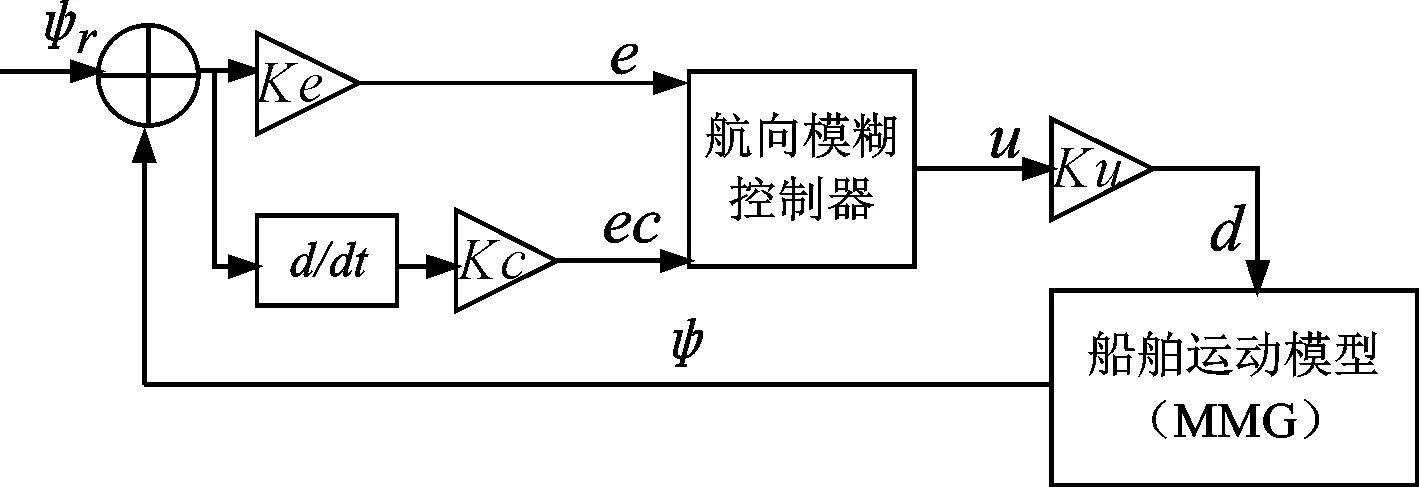
圖2 船舶航向模糊控制器結構圖
模糊控制器設計步驟如下.
步驟1設定輸入輸出變量取值范圍 模糊控制器航向偏離差值e及差值變化率ec取值范圍是[-6,6],輸出變量u取值范圍為[-3,3].控制器的語言值設計為
e=[NB,NM,NS,ZE,PS,PM,PB]
ec=[NB,NM,NS,ZE,PS,PM,PB]
u=[NB,NM,NS,ZE,PS,PM,PB]
步驟2確定系統的量化因子和比例因子 設航向偏離差值e、差值變化率ec以及輸出變量u取值范圍分別為[-xe,xe],[-xec,xec],[-xu,xu],則Ke=6/xe,Kc=6/xec,Ku=xu/3.
步驟3確定隸屬度函數 隸屬度函數的確定直接影響到控制器的控制效果.航向偏離差值e及差值變化率ec選用較為簡潔的三角隸屬函數(trimf),見圖3.輸出變量u選用π形隸屬函數(pimf),見圖4.

圖3 航向偏離差值以及差值變化率隸屬度 圖4 輸出變量u(舵角)隸屬度
步驟4確定模糊規則庫 模糊規則庫是總結控制專家的控制經驗以及人為的控制決策整理而成,所設計的航向模糊控制規則見表2.
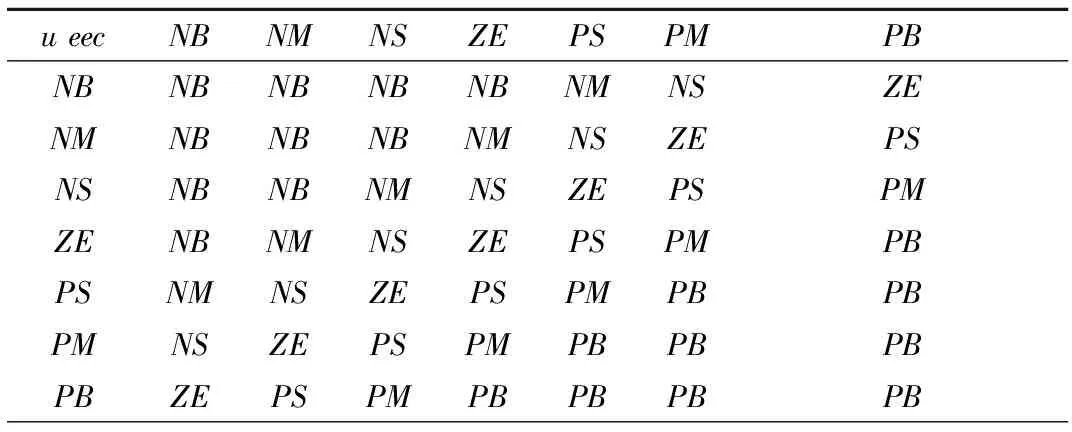
表2 航向模糊控制規則庫
2.2 航向Fuzzy-PID控制器
Fuzzy-PID控制器是基于模糊控制器及PID控制器基礎上所設計的,該控制器的特點是在航向偏差較大(>30°)時利用模糊推理的方法調整系統控制量u,保證航向偏差較大時的控制效率和速度,而在航向偏差較小(≤30°)時轉換為PID控制來保證控制精度與穩態.Fuzzy-PID控制器的控制結構見圖5.

圖5 調節系統控制量的模糊PID控制器結構圖
其中:PID控制器參數根據運算調試得到其取值為Kp=0.17,Ki=0.0004,Kd=1.0.
3 仿真實驗
航向控制仿真在MATLAB R2014a軟件SIMULINK模塊上進行,采用的船舶運動模型是1.2中的分離型船舶運動模型(MMG),控制船舶參數見表3.
表3 控制船舶參數表
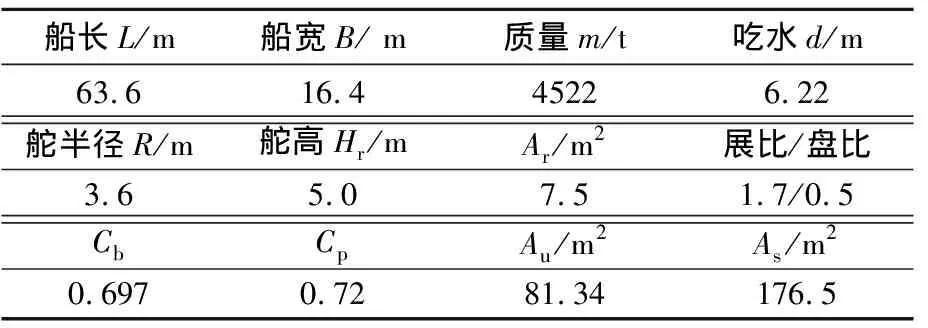
L/mB/ m m/td/m63.616.445226.22R/mHr/mAr/m2/3.65.07.51.7/0.5CbCpAu/m2As/m20.6970.7281.34176.5
注:Ar--舵面積;Cb-船舶方形系數;Cp-船舶菱形系數;Au-船舶縱向受風面積;As-船舶橫受風面積.
首先,采用三種不同的轉向角度(0°~90°,30°~90°,60°~90°)來驗證航向成形算法的可行性以及合理性.其次對轉向角度(60°~90°),使用傳統PID控制器、模糊控制器及Fuzzy-PID控制器進行對比仿真,比較不同控制器在船舶轉向過程中的轉向角速度、舵角,以及航向變化情況.
3.1 多角度轉向下的模糊控制器仿真
采用三種不同轉向角度(0°~90°,30°~90°,60°~90°)利用航向模糊控制器進行仿真來驗證航向成形算法的前饋調節作用.設計航向偏離差值e最大取π/2,差值變化率ec最大取rmax=0.514(°)/s,輸出變量u最大取35π/180°.三種不同轉向角度下的轉向角速度權重、轉向角速度以及模糊控制器參數見表4.
根據圖2的船舶航向模糊控制器進行多角度轉向仿真得到的仿真結果見圖6~8.
由上述仿真結果可以得出:
1) 經過航向成形函數處理后,船舶能夠以恒定的轉向角速度(rd1=0.463,rd2=0.308,rd3=0.154(°)/s)進行轉向,船舶大角度轉向時轉向角速度更快,超調更大,但耗時更短.小角度轉向時轉向角速度更小,耗時更長,但更加穩定精確.

表4 多角度轉向仿真參數

圖6 多角度轉向軌跡圖
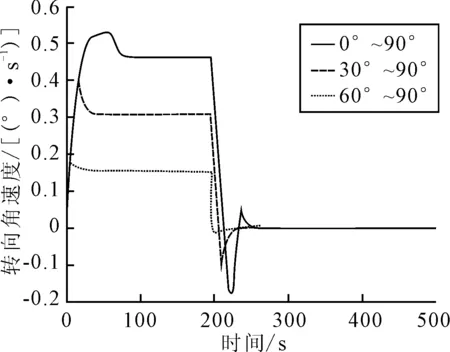
圖7 多角度轉向角速度圖
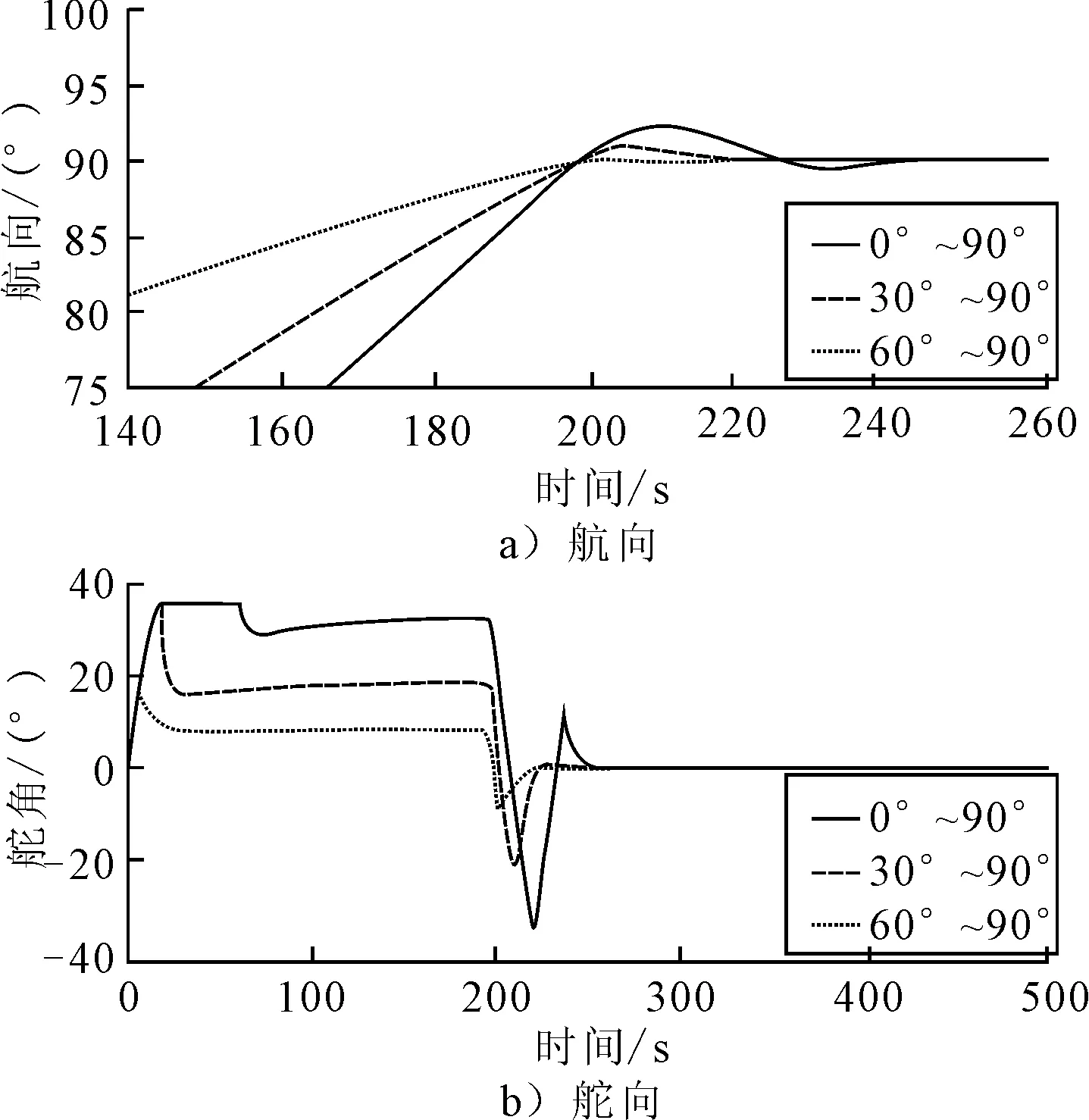
圖8 多角度轉向仿真航向舵角變化圖
2) 圖8中舵角響應圖表明,轉向角度越大,所操舵角和回舵角度也越大,由操舵引起的船舶航向超調也更大.轉向角度越小,所操舵角和回舵角度也越小,由操舵引起的船舶航向超調也更小.
多角度轉向下的模糊控制器仿真驗證了航向成形算法的正確性及有效性.當航向偏差角度較大時,模型能夠采取較大的轉向角速度以縮短轉向所需時間;當航向偏差角度較小時,模型則采取較小的轉向角速度以控制船舶能夠精確達到設定航向.航向成形算法可以有效運用于船舶轉向的前饋調節,使得船舶轉向過程更加合理.
3.2 多控制器下的航向控制仿真
選用0°~90°轉向進行仿真實驗,采用相同的調節參數,分別利用傳統PID控制器、模糊控制器以及Fuzzy-PID控制器進行航向控制仿真,對比分析三種控制器的控制效果,三種控制器在轉向過程中的控制結果見圖9~10.
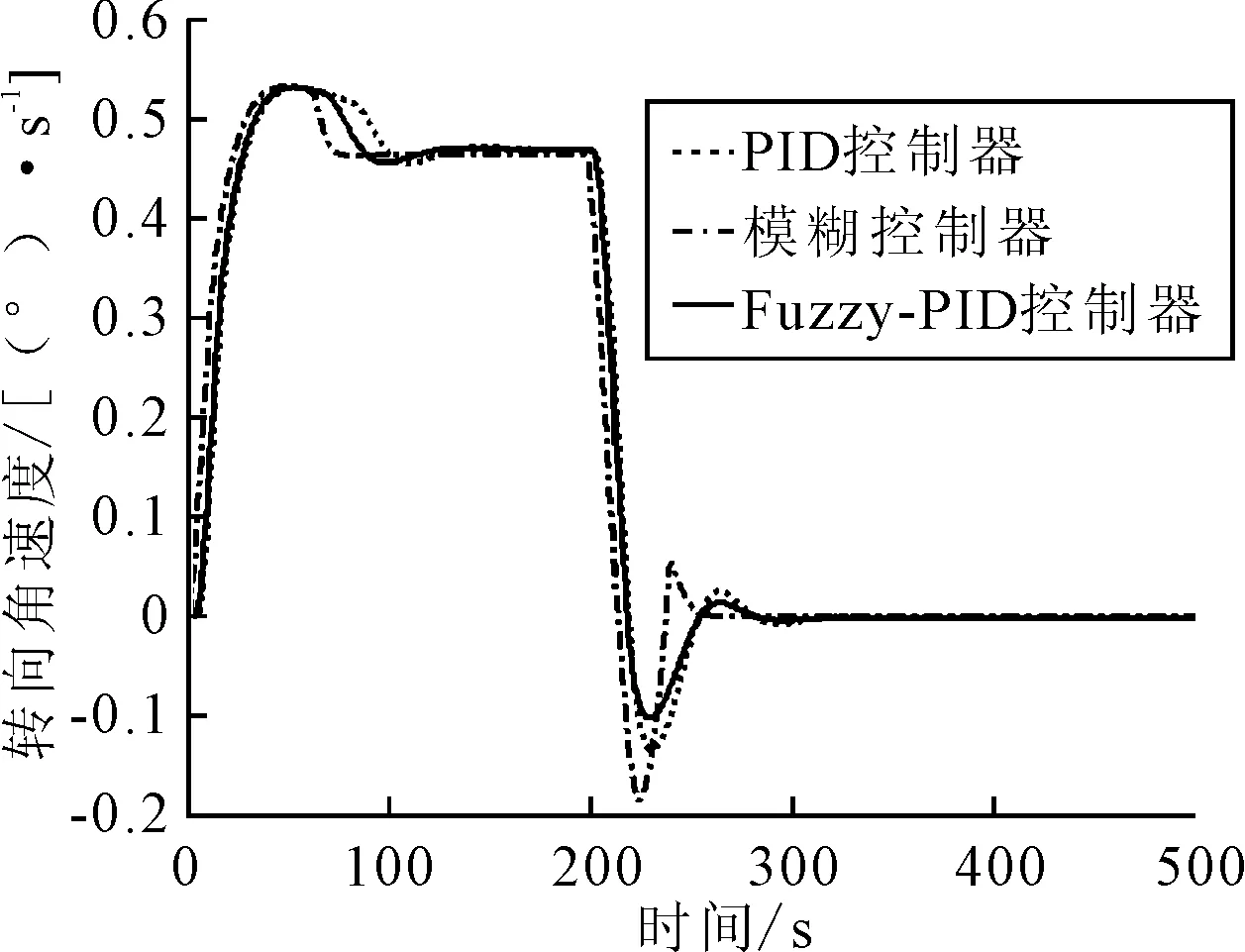
圖9 轉向角速度對比圖
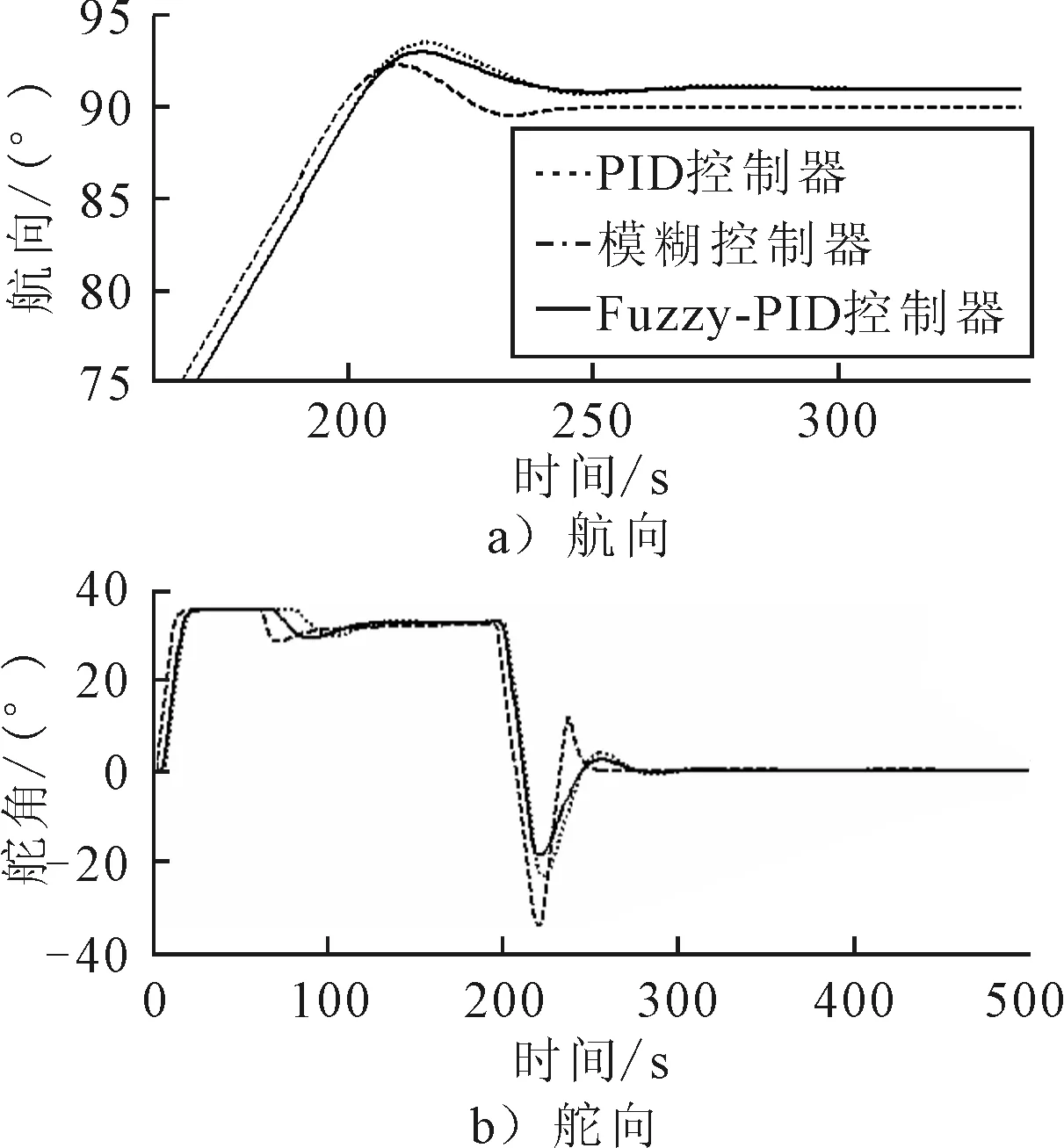
圖10 轉向仿真航向舵角變化對比圖
由上述仿真結果可以得出:
1) 傳統的PID控制器在設定的PID參數下能夠有效實現轉向操作,但是仍存在超調較大、轉向操作較慢等缺點.
2) 模糊控制器在進行大角度轉向控制時,轉向速率快、動態性能好,但是在轉向后期即小角度轉向時存在精確度不足等缺陷.
3) Fuzzy-PID 控制器在進行轉向控制時超調較小、轉向操作及時,且在轉向后期舵角更平穩、精確度更高,兼具模糊控制動態性能好與PID控制穩態精度高的優點.
4 結 束 語
針對船舶航向控制缺乏前饋調節的問題,首先基于航向成形算法對初始航向以及目標航向進行前饋調節,將成形航向偏離值作為船舶航向控制器的輸入變量,利用其控制舵角變化,經過MMG船舶運動模型達到改變船舶航向的效果.其次為達到實際船舶控制的精度要求,結合相關文獻設計了一個與實際轉向過程較相符的模糊規則庫,在模糊控制器與PID控制器基礎上設計了Fuzzy-PID控制器,對船舶進行系統控制.
仿真結果表明航向成形算法可以有效運用于船舶轉向的前饋調節,使得船舶轉向過程更加合理.在實現轉向控制的前提下,Fuzzy-PID控制器的舵角響應效果更合理,具有良好的動態性能和較高的穩態精度.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03