基于載波相位變率的GPS單站測速方法
2019-07-01 03:40:34田良輝陳附圖
科技創(chuàng)新與應(yīng)用 2019年18期
田良輝 陳附圖


摘 ?要:針對目前常用的位置微分定速以及差分測速等方法的不足和局限性,提出了基于卡爾曼濾波估計載波相位變率的單站測速方法。相對于GPS接收機(jī)自身的多普勒頻移,估計的載波相位變率更好的顧及了載體運(yùn)動的特性和噪聲平滑,通過實驗數(shù)據(jù)解算,卡爾曼濾波估計的相位變率單站測速精度,在靜態(tài)時段能達(dá)到亞cm/s級,動態(tài)時段能達(dá)到cm/s級。
關(guān)鍵詞:載波相位變率;單點(diǎn)測速;GPS測速
中圖分類號:P228.4 ? ? ? ?文獻(xiàn)標(biāo)志碼:A ? ? ? ? 文章編號:2095-2945(2019)18-0014-03
Abstract: Considering the shortcomings and limitations of position differential velocity determination and differential velocity determination by GPS, a single station velocity measurement method based on Kalman filter to estimate carrier phase variability is proposed. Compared with the Doppler frequency shift of GPS receiver itself, the estimated carrier phase variability takes better account of the characteristics of carrier motion and noise. Through the experimental data, the accuracy of single point velocity determination based on the carrier phase change-rate variability accuracy estimated by Kalman filter can reach sub-cm/s level in static time, and can reach cm/s level in a dynamic time.
Keyword: carrier phase change-rate; single-point velocity determination; GPS velocity determination
1 概述
速度一直以來都是表征物體運(yùn)動的重要參數(shù)之一,而傳統(tǒng)的獲取物體運(yùn)動速度的方法多采用加速度積分或者位置微分的方式,該方法與時間存在較大的相關(guān)性,且測速精度普遍較低,基本上能滿足車船或低速飛行器的導(dǎo)航要求。但在衛(wèi)星的軌道對接、航空重力測量、精細(xì)農(nóng)業(yè)播種施肥和地震的同震位移監(jiān)測中,分米級的定速精度無法滿足其要求。
GPS因其精度高、實時性強(qiáng)且安裝方便、價格低廉等特點(diǎn),可以簡單快速、高精度的確定載體的速度,因而在測速領(lǐng)域越來越得到用戶的親睞。常用的測速方式多采用DGPS(差分GPS)的方式,該方法無需估計載波相位的整周模糊度,只需要在運(yùn)動載體的活動區(qū)域內(nèi)布設(shè)基準(zhǔn)站作為參考,與載體自身的GPS接收機(jī)數(shù)據(jù)求差,通過消除對流層、電離層、衛(wèi)星鐘差等誤差影響,來提高速度解算的精度,根據(jù)國內(nèi)外相關(guān)學(xué)者研究,該差分測速的方法能達(dá)到cm/s-mm/s級[1-3]。但該方法也存在不足:一旦飛行器或者地面運(yùn)動載體遠(yuǎn)離基站范圍,即進(jìn)行數(shù)據(jù)差分的對流層和電離層的范圍擴(kuò)大,便難以采用求差的方式消除誤差影響,測速精度便顯著下降。另外,在一些荒漠或者人跡罕至的地區(qū),布設(shè)基準(zhǔn)站也存在較大難度。
基于以上各種測速方法的不足或者局限性,部分學(xué)者參照單站精密定位技術(shù),提出了GPS單站測速的數(shù)學(xué)模型,并分析了該定速模型的測速精度[4-5]。目前GPS單站測速主要根據(jù)GPS接收機(jī)的原始多普勒頻移和相位變率來確定載體的速度或加速度。該方法從理論上較好的克服了以上測速方法的不足,僅僅利用一臺接收機(jī),就可以高效快速的獲取載體的速度。
2 單站測速模型
4 算例
算例數(shù)據(jù)來源為某次實驗測量的飛行數(shù)據(jù),將GPS接收機(jī)安置在飛機(jī)上,來測定飛機(jī)起飛前后以及飛行中的速度,數(shù)據(jù)先進(jìn)行預(yù)處理,經(jīng)過周跳探測和修復(fù)后,對載波相位進(jìn)行卡爾曼濾波得到相位變率,然后利用單站測速模型進(jìn)行定速解算。實驗數(shù)據(jù)的基本情況為:飛行時速約為200km/h,GPS采樣率為2Hz,飛行高度約為500m,飛機(jī)首先先停機(jī)坪靜態(tài)觀測一段時間后起飛,飛行的俯視圖(采用單點(diǎn)定位解算)見圖1,在同一測線上來回重復(fù)進(jìn)行了四次重力測量。圖2所示的經(jīng)過轉(zhuǎn)換的飛機(jī)的東北天速度,其中,E表示東西方向,N表示南北方向,U表示垂直方向。
圖2為采用卡爾曼濾波估計的載波相位變率的測速結(jié)果,在0-4000歷元段,飛機(jī)處于靜態(tài)時段,之后起飛進(jìn)行航空重力測量,對應(yīng)圖1,以E-W方向為例,可以看出飛機(jī)的四次平穩(wěn)重復(fù)重力測線飛行,在飛機(jī)完成測線飛行后進(jìn)行轉(zhuǎn)向,此時速度發(fā)生了較大的突變。
4.1 靜態(tài)時段測速精度
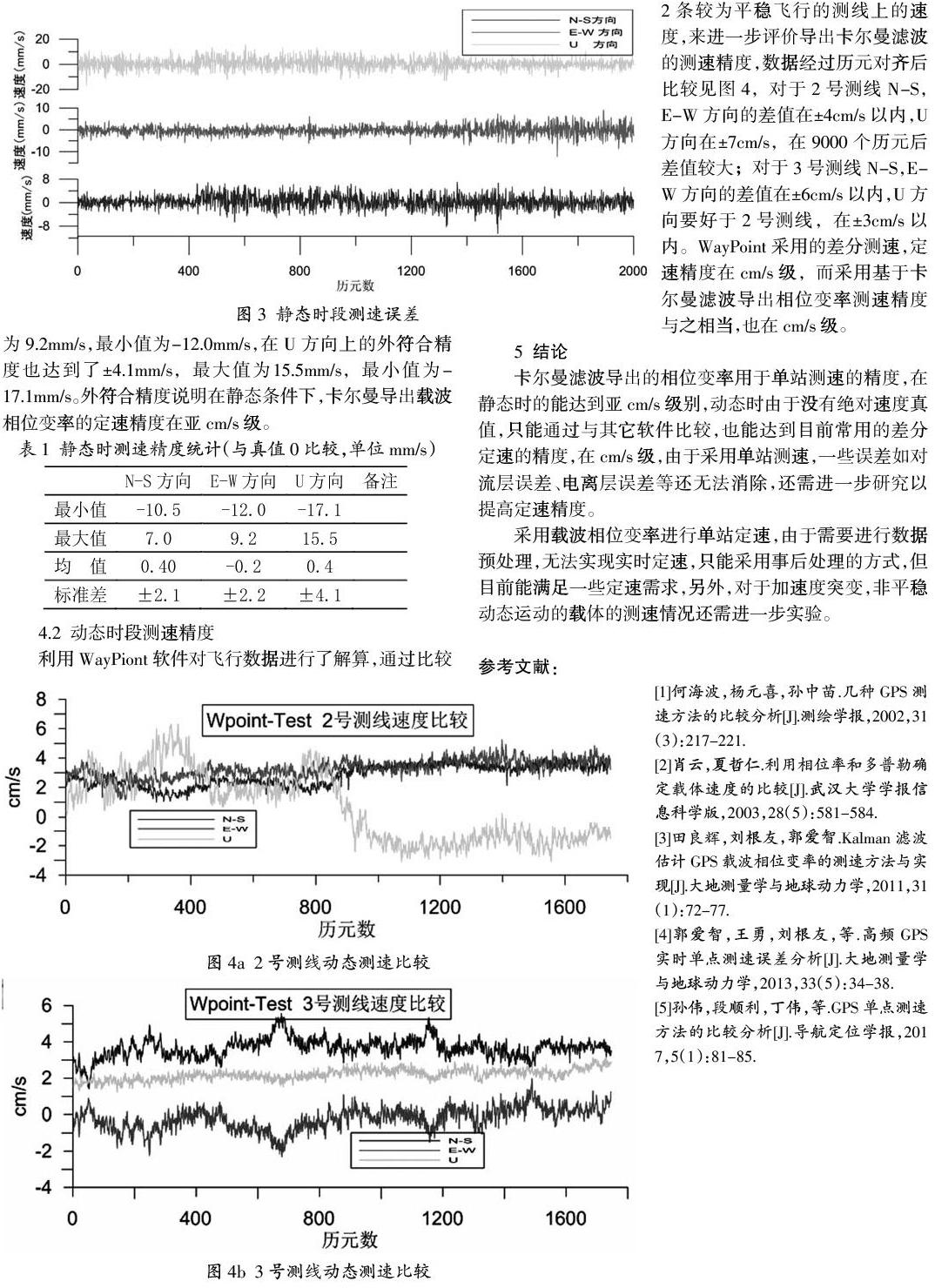
為評價單站測速的精度,選取一段靜態(tài)時刻(飛機(jī)在靜態(tài)時段有發(fā)動機(jī)啟動,這里只選取部分飛機(jī)未發(fā)動情況),飛機(jī)的速度真值為0,解算的精度即為測速的真誤差。解算誤差見圖3。從圖上可以看出,E-W和S-N方向的誤差大部分集中在±10mm/s以內(nèi),而U方向的速度誤差集中在20mm/s以內(nèi),估計原因為受對流層和多路徑較大的垂直方向的載波相位觀測誤差傳遞給了相位變率。表1為誤差統(tǒng)計,結(jié)果表明:靜態(tài)條件下,測速的外符合精度在E-W,S-N方向達(dá)到了±2.1mm/s,其中最大值為9.2mm/s,最小值為-12.0mm/s,在U方向上的外符合精度也達(dá)到了±4.1mm/s,最大值為15.5mm/s,最小值為-17.1mm/s。外符合精度說明在靜態(tài)條件下,卡爾曼導(dǎo)出載波相位變率的定速精度在亞cm/s級。
4.2 動態(tài)時段測速精度
利用WayPiont軟件對飛行數(shù)據(jù)進(jìn)行了解算,通過比較2條較為平穩(wěn)飛行的測線上的速度,來進(jìn)一步評價導(dǎo)出卡爾曼濾波的測速精度,數(shù)據(jù)經(jīng)過歷元對齊后比較見圖4,對于2號測線N-S,E-W方向的差值在±4cm/s以內(nèi),U方向在±7cm/s,在9000個歷元后差值較大;對于3號測線N-S,E-W方向的差值在±6cm/s以內(nèi),U方向要好于2號測線,在±3cm/s以內(nèi)。WayPoint采用的差分測速,定速精度在cm/s級,而采用基于卡爾曼濾波導(dǎo)出相位變率測速精度與之相當(dāng),也在cm/s級。
5 結(jié)論
卡爾曼濾波導(dǎo)出的相位變率用于單站測速的精度,在靜態(tài)時的能達(dá)到亞cm/s級別,動態(tài)時由于沒有絕對速度真值,只能通過與其它軟件比較,也能達(dá)到目前常用的差分定速的精度,在cm/s級,由于采用單站測速,一些誤差如對流層誤差、電離層誤差等還無法消除,還需進(jìn)一步研究以提高定速精度。
采用載波相位變率進(jìn)行單站定速,由于需要進(jìn)行數(shù)據(jù)預(yù)處理,無法實現(xiàn)實時定速,只能采用事后處理的方式,但目前能滿足一些定速需求,另外,對于加速度突變,非平穩(wěn)動態(tài)運(yùn)動的載體的測速情況還需進(jìn)一步實驗。
參考文獻(xiàn):
[1]何海波,楊元喜,孫中苗.幾種GPS測速方法的比較分析[J].測繪學(xué)報,2002,31(3):217-221.
[2]肖云,夏哲仁.利用相位率和多普勒確定載體速度的比較[J].武漢大學(xué)學(xué)報信息科學(xué)版,2003,28(5):581-584.
[3]田良輝,劉根友,郭愛智.Kalman濾波估計GPS載波相位變率的測速方法與實現(xiàn)[J].大地測量學(xué)與地球動力學(xué),2011,31(1):72-77.
[4]郭愛智,王勇,劉根友,等.高頻GPS實時單點(diǎn)測速誤差分析[J].大地測量學(xué)與地球動力學(xué),2013,33(5):34-38.
[5]孫偉,段順利,丁偉,等.GPS單點(diǎn)測速方法的比較分析[J].導(dǎo)航定位學(xué)報,2017,5(1):81-85.