電力機器人技術在電網中的應用研究
2019-07-02 09:25:34
應用能源技術 2019年6期
(貴州北盤江電力股份有限公司董箐發電廠,貴州 貞豐 562200)
0 引 言
電力作為工業發展和社會生活的主要組成部分,國家發展和人民生活離不開電力,這就對電力的發、輸、變、配、用等多個環節的設備系統可靠性和穩定性、運維工作的準確性和有效性、設備監視的實時性提出了更高標準。機器人技術是一個相對較新的現代技術領域,跨越了傳統工程學的邊界,尤其是新領域工程,如應用工程,制造工程和知識工程,它的進步和發展在很大程度上改變了我們的生活。自1959年美國科學家恩格伯格制造出全球首臺機器人Unimate以來,機器人被廣泛用來完成對精確度、精確性、可重復性、量產性和質量有嚴格要求的任務[1]。機器人在電力行業的全面應用對電力系統的安全穩定運行具有舉足輕重的意義。
2015年《中國制造2025》明確將機器人作為重點發展領域。2016年《機器人產業發展規劃(2016-2020年)》著力推動機器人產業快速健康可持續發展,積極打造面向全球的機器人技術和產業生態體系。2017年《新一代人工智能發展規劃》指出應研制智能工業機器人、智能服務機器人,實現大規模應用并進入國際市場。2018年我國電力機器人行業的第一個標準《電力機器人 術語》編寫工作已經啟動,是電力機器人標準化發展的里程碑,對于電力行業發展和技術路線的規劃起到了至關重要的推動作用。這一系列的政策和文件推動著電力機器人的快速發展。
1 電力機器人概述
為了適應高復雜環境、多操作場景的需要,電力機器人在電力系統中的應用是十分必要的,不僅能時刻保障電力系統設備處于穩定運行狀態,又能開展高效的巡視、檢修與維護,提高電力多環節的運維效率和運維水平。電力機器人的主要特點有以下幾個方面:
(1) 電力機器人的巡視、檢修的工作質量不受客觀環境條件和人為主觀因素影響,無論什么運維環境、什么氣象地理條件下,機器人按照既定的巡視檢查路線開展巡維工作,有針對性對設定的發電、輸電、變電、配電等應用場景的設備進行巡視和檢查,做到客觀、全面評價,提高設備巡維水平,為設備安全穩定運行提供保障。
(2)電力機器人可以代替人工處理一些例如火電蒸汽管道泄露檢查、核電反應堆檢查、高壓輸電線檢查等一些高危作業場景的工作,同時如變電站巡視檢查、線路巡視、設備臺賬管理等需要消耗大量人力、物資的工作,利用機器人不僅避免危險和大量重復性勞動,而且可以保質保量完成,不會出現由于人員的疏忽造成巡視不到位等問題。
(3)電力機器人將圖像識別、聲音識別、紅外測溫、可見光檢查、激光測振等多功能集成于一體,可以將巡檢和檢查情況記錄并上傳至管理系統,同時可以對測試情況進行判斷,提高了巡視質量和巡視效果,解決了人工巡視、檢查的效果受運維人員技術水平影響的,造成對設備缺陷誤判、錯判等問題。
2 電力機器人分類
按照應用領域分類可分為發電、輸電、變電、配電電力生產的四大領域機器人。按照應用場景不同則分為電力調度應用、電力巡檢應用、電力檢測應用和電力維護應用四個方面。電力機器人分類圖如圖1所示。
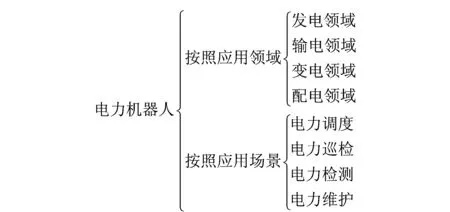
圖1 電力機器人分類
3 電力機器人應用
3.1 電力調度應用
電力調度機器人能夠完全改變以人工調度為主的調度方式,將人工智能、大數據等技術融入調度領域,實現充分利用態勢感知和人工智能的智慧調度機器人模式。這對電力調度具有十分重要的現實和發展意義。近些年人們一直在不斷嘗試,部分成果在主配網的調度中應用。2018年杭州供電公司配網調度指揮中心正式投運了全國首個虛擬人工智能(AI)配網調度員帕奇,能夠實現故障判斷、計劃發令、搶修指揮、知識圖譜學習新業務等功能。2019年廣東省地調度端程序化操作機器人首次在全國實現全面程序化操作部署,并投入運行。能夠實現遠方遙控“一鍵操作”,操作設備與系統的隔離,全過程實現智能安全校核。
3.2 電力巡檢應用
電力機器人從事巡檢工作是在電力系統中應用較早的領域,且隨著電力系統的不斷擴大和發展,其應用的需求和場景是不斷增大的。發電領域,文獻[2]研發了一種具備視頻圖像識別、紅外測溫、激光測振及聲音識別、專家系統分析等多功能的智能巡檢機器人在火電廠應用,尤其是跑冒滴漏監測和聲音泄露檢測方面具有明顯優勢。輸電領域,文獻[3]研制了輸電線路巡檢穿越式和跨越式越障兩種機器人,實現了檔距巡檢、耐張端巡檢和多耐張端或全檢巡檢,進行上線和下線的自動巡檢作業。變電領域,智能巡檢機器人是目前應用比較成熟的電力機器人,通過巡檢室內、室外的有軌和無軌型巡檢機器人,能實現紅外測溫、設備狀態的自動識別和分析判斷,可以替代人工的巡視工作。如山東魯能機器人、中科院機器人、浙江國自機器人等越來越多的研發機構和電網投入其中,大大提升了巡檢機器人的功能和性能,對完全替代人工又邁出一步。
3.3 電力檢測應用
隨著狀態檢修和電網智能化的技術發展,電力系統網架增強,系統穩定性要求提高,電力行業的檢測越來越重,為此,2013年電能表柔性自動化鑒定系統在重慶市電力公司研發并投入使用。2014年國內首個機器人及自動化設備檢測中心在山東省電力公司建設并投入使用,實現對無人機自動檢測。文獻[4]研制輸電線斷股檢測機器人,利用圖像梯度分布的不同實現復雜作業的斷股檢測。文獻[5]研制了絕緣子電阻檢測機器人可大大提升測試效率,同時能夠滿足不同方位的瓷絕緣子測試需求。
3.4 電力維護應用
電力設備的維護工作大多依靠人力工作執行,這樣不僅效率低,而且一些環境氣候復雜、危險系數極大的任務工作存在極大的安全隱患。2009年,我國第一臺輸電線路除冰機器人在山東超高壓公司和南網超高壓柳州局投運。2016年,國內第一臺輸電帶電作業機器人能實現帶電清除、更換絕緣子等作業。文獻[6]研制了斷股修補機器人通過驅動輪和越障機構實現斷股懸垂復位。文獻[7]研制輸電線路帶電緊固螺栓機器人,通過視覺反饋和力反饋完成代替人工完成緊固工作。文獻[8]研制輸電線路絕緣子清掃與檢測機器人,能攜帶清掃機構和檢測裝置實現絕緣子的帶電清掃與檢測。文獻[9]研制用于清掃與檢測GIS管道內腔異物的機器人系統,實現在腔內平滑運行,無死角進行檢測。
4 電力機器人應用的面臨問題及展望
隨著電力機器人的技術發展和現場應用經驗正常,同時也暴露出現有機器人發展存在的一些問題:
(1)標準化工作方面:電力機器人標準分布在多個不同的標準管理部門;標準制定缺乏頂層設計、協調統一;僅從應用角度出發,缺乏上下游參與及檢測類標準。在今后的工作中應加快制訂和建設電力機器人的標準體系,電力機器人的性能、功能能完全滿足電力行業的標準,讓電力機器人發揮其優勢,既有人工巡視的優勢同時又能彌補不足。
(2)巡檢工作方面:電力機器人自動巡檢雖可得到圖片、視頻等巡檢信息,但其巡檢結果的判斷準確率還仍需提高,目前仍需人工干預,進行人為觀察和甄別,效率較低。
隨著圖像識別技術、通信技術、大數據技術和人工智能技術的飛速發展,通過高效率、高精度識別和提取機器人獲取的信息,以及大數據和人工智能技術,分析設備的潛在隱患、壽命預測,實現系統設備的全生命周期管理,為系統設備的可靠運行提供保障。
(3)維護工作方面:大部分維護機器人的功能是單一的,以完成單一作業任務為主,而維護工作任務種類眾多,單一作業任務使用頻次低,易造成維護機器人利用率低。
隨著電網智能化發展,機器人在電力系統中的維護場景和工作勢必會增加,多功能單機電力機器人實現多次或單次能并行實現多維護場景下的作業執行是電力維護機器人的發展趨勢,來有效提高機器人利用率及降低使用成本。
5 結束語
電力機器人始終是電力行業提高工作效率,實現自動調度、自動巡視、自動維護等領域的有力手段。目前電力機器人的理論研究和實踐經驗都比較豐富,但仍然存在著標準化、功能等方面的諸多問題。但隨著信息化、精密設備研發、技術標準和技術管理水平的不斷提升,機器人的穩定性、可控性不斷改善,在電力行業的全面應用和替代人工將會是指日可待。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00
