無人機低空傾斜攝影測量在地籍測量中的應用
2019-07-05 09:41:42何淼
城市勘測 2019年3期
何淼
(珠海市測繪院,廣東 珠海 519000)
1 前 言
目前很多地方開展了農村地籍調查的工作,外業測量及調查工作是重要的一環,傳統的作業方法[1~3]需要大量的外業測繪人員深入現場長時間操作,其成本高、工作強度大、操作工序復雜、且耗費工時,亟須新的作業方法和更先進的測繪技術來提高作業效率和減少外業測量的工作。近期快速發展的無人機低空攝影測量技術可針對性解決該問題[4~11]。珠海市測繪院承接了較多農村地籍調查項目,為把握技術前沿,已在近期幾個項目中采用了無人機低空傾斜攝影測量技術,并取得較好的實際應用效果,對比傳統調查方式手段效率大大提高。
2 傳統農村地籍調查的方法
解析法和圖解法是目前農村地籍調查的主要方法。簡而言之,解析法就是先數字化測圖后再調查,圖解法則是在正射影像圖作為底圖的基礎上展開調查。兩種方法各有優缺,解析法較圖解法精度高,但是工期較長,圖解法精度較低,但工作時間短。方法的選擇需結合實際作業地區的情況,發達地區和中心城區一般使用精度更高的解析法,圖解法因其操作簡單,適合應用于邊遠山區。
2.1 解析法
以滿足農村集體土地確權登記發證工作為出發點,充分利用已有地籍調查成果和登記成果,開展宅基地、集體建設用地和零星國有建設用地土地權屬調查、農房調查和地籍測量,總體技術路線圖如圖1所示。
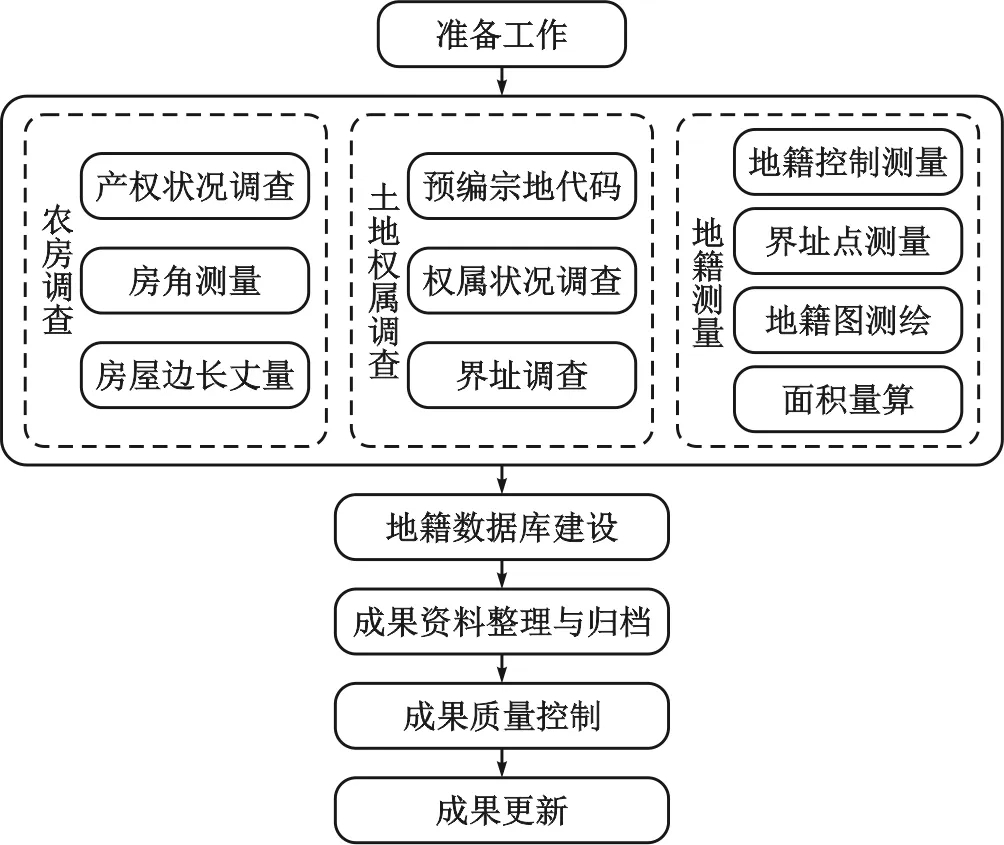
圖1 解析法農村地籍調查流程圖
2.2 圖解法
以高分影像成果為主要數據源,充分利用已有土地調查、登記和戶籍等資料,通過室內采集與調查、外業調查與邊長丈量、內業整理與建庫,多快好省地完成農村地籍調查工作。技術路線圖如圖2所示。
從以上兩種方法的技術路線不難看出,解析法對實施單位要求更高,解析法要求實地用GPS、全站儀數學化測完圖,形成工作底圖后才能開展調查,因此需要投入大量的測繪專業技術人員為了提高效率,本單位在A地區和B地區嘗試使用無人機低空攝影測量方法進行地籍測量工作,以期降低外業的人員投入和工作效率,突破傳統地籍調查技術瓶頸。
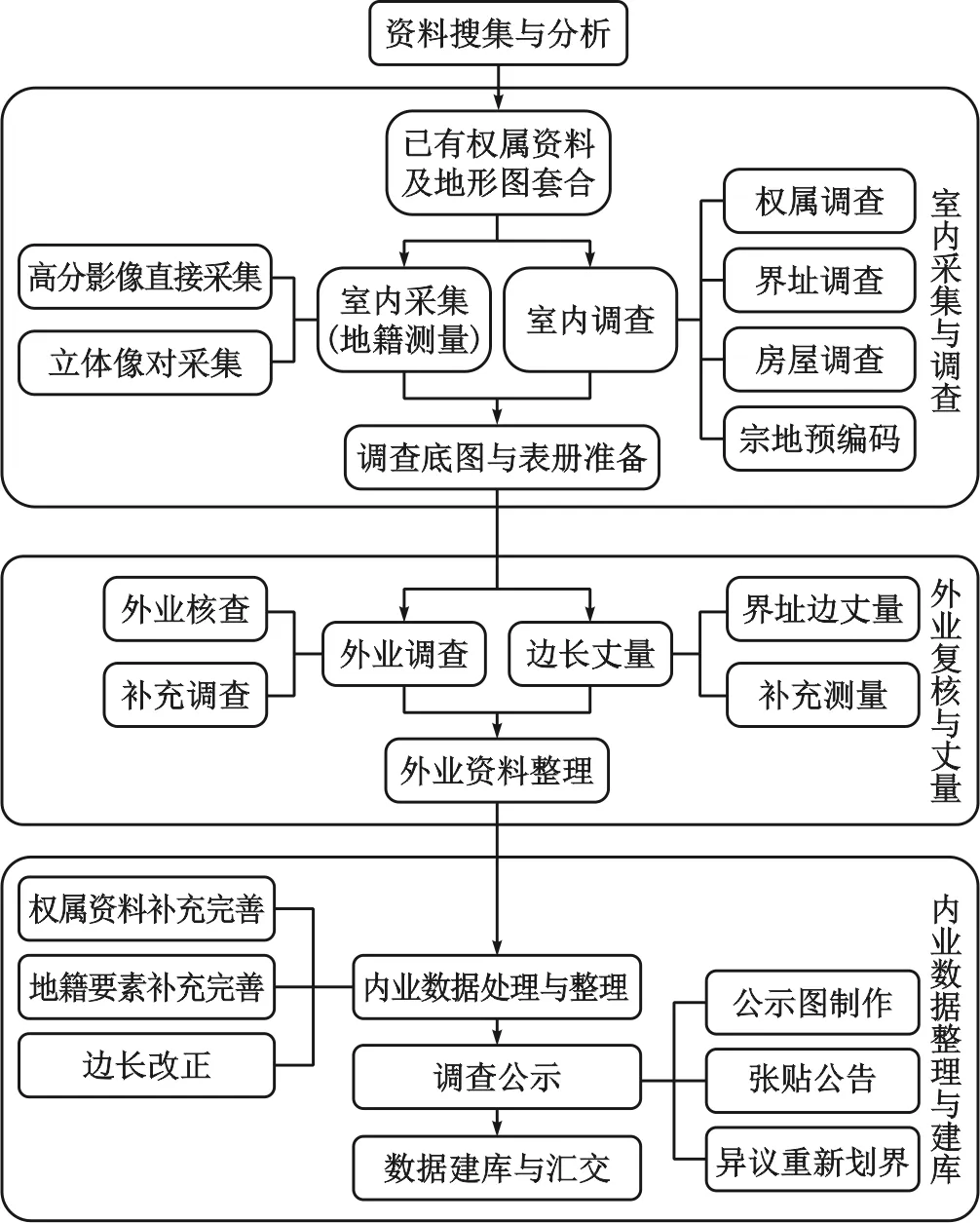
圖2 圖解法農村地籍調查流程圖
3 無人機低空傾斜攝影地籍測量
傾斜攝影技術是測繪領域近些年發展起來的一項高新技術,打破了以往正射影像只能從垂直角度拍攝的局限,通過在同一飛行平臺上搭載多臺傳感器,同時從1個垂直、4個傾斜等5個不同的角度采集影像,將用戶引入了符合人眼視覺的真實直觀世界。傾斜攝影測量技術以大范圍、高精度、高清晰的方式全面感知復雜場景,通過高效的數據采集設備及專業的數據處理流程生成的數據成果直觀反映地物的外觀、位置、高度等屬性,為真實效果和測繪級精度提供保證。同時有效提升模型的生產效率,采用人工建模方式一兩年才能完成的一個中小城市建模工作,通過傾斜攝影建模方式只需要3~5個月時間即可完成,大大降低了三維模型數據采集的經濟代價和時間代價。
以珠海市測繪院承接的農村地籍調查項目為例,A地區地籍項目需要測量的村莊 1∶500地籍圖面積約為 15 km2,B地區需要測量的村莊 1∶1 000地籍圖面積約為 30 km2,A地區的航拍影像需要優于 2 cm分辨率的傾斜攝影,B地區航拍影像需要優于 5 cm分辨率的傾斜攝影,并利用傾斜攝影數據利用Smart3D等軟件進行實景三維自動建模,然后再用清華山維軟件勾畫地形圖。
3.1 無人機傾斜攝影地籍測量工作流程
如圖3所示,本次實景三維建模的生產制作流程包括:
(1)現場勘察與資料收集:對2個區域進行現場勘測,尋找合適的起飛地點,對測區現場的限飛情況與相關部門進行了解溝通,收集天氣氣象資料,制定合理的飛行時間。
(2)技術設計:選擇合適的飛行器,制定飛行路線、區域,選擇適合的飛行時間,對航線重疊度、航次等重要參數進行設計論證,制定合理可行的實施方案和安全方案。
(3)傾斜三維攝影采集:按照技術設計現場進行航測飛行數據采集工作。
(4)實景三維建模處理:利用Smart3D、Altizure等專業軟件對傾斜攝影采集的數據進行處理,自動生成實景三維模型。
(5)利用清華山維或者南方idata等軟件在三維模型上勾畫地形圖。
(6)內業質檢、外業查漏補缺。
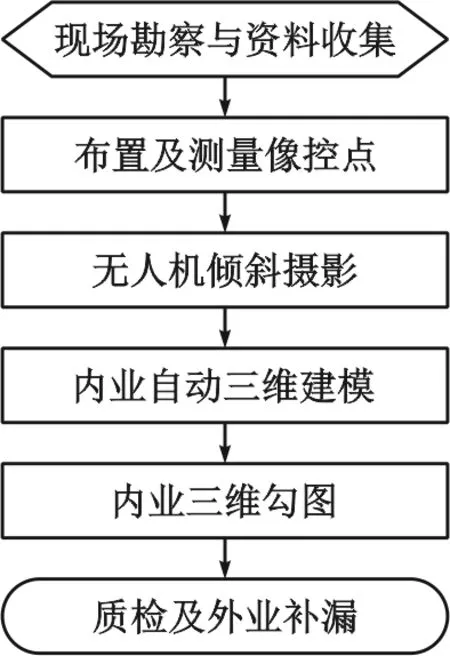
圖3 工作流程
3.2 無人機傾斜攝影技術硬件簡介
無人機攝影設備、無人機傾斜攝影系統分別如圖4、圖5所示。

圖4 無人機攝影設備
(1)傾斜相機:它通常情況采用5個方位進行數據采集,分為正攝、前視、后視、左視、右視。

圖5 無人機傾斜攝影系統
(2)飛行器:
無人機傾斜攝影主要以固定翼、旋翼為主流。
①固定翼:一般以電動、油動為主要動力源,優點:續航時間長、效率高。不足:由于固定翼航速較快配合的相機曝光間隔時間要求高,其次由于有安全航高的限制、載重的限制通常能夠獲取的影像地面分辨率在 8 cm以上。面對測繪行業對精度要求不斷提高,受眾面變窄。
②旋翼機:一般有三、四、六、八旋翼。
優點:可懸停、易操作、安全性高,可以根據測區情況進行不同高度的飛行作業,使獲取的影像地面分辨率達到 1 cm以下。現階段采用八軸飛機為主流,其原因是八軸飛機可以支持斷槳保護,在失去一個機臂時可正常飛行,在失去不相鄰的兩個機臂時仍然可以安全回收。在飛控的選擇上作為航測用途的多選擇雙控制器,原因是無人機傾斜攝影在市區作業較多,安全的保障是第一位的。不足:續航時間有限,一般的無人機傾斜攝影相機重量在 2 kg~5 kg,續航在 30 min左右。
本項目使用的是對電池改裝容量加大了的旋翼機。
3.3 無人機傾斜攝影測量數據采集
制定計劃后,在天氣條件合適的情況下,組織人員設備進行了外業無人機傾斜攝影采集,根據現場條件不同,飛行高度在 100 m~200 m之間,航線設計符合相關技術要求,傾斜攝影的航線設計采用專用航線設計軟件進行設計,其相對航高、地面分辨率及物理像元尺寸滿足三角比例關系。本次要生產自動化模型,旁向重疊度需要達66%以上,航向重疊度也需要達到66%以上。航線設計軟件生成一個飛行計劃文件,該文件包含飛機的航線坐標及各個相機的曝光點坐標位置。實際飛行中,各個相機根據對應的曝光點坐標自動進行曝光拍攝。
3.4 內業數據三維建模
數據獲取完成后,首先要對獲取的影像進行質量檢查,對不合格的區域進行補飛,直到獲取的影像質量滿足要求,其次進行勻光勻色處理,在飛行過程中存在時間和空間上的差異,影像之間會存在色偏,這就需要進行勻光勻色處理,再次進行幾何校正、同名點匹配、區域網聯合平差,最后將平差后的數據(3個坐標信息及3個方向角信息)賦予每張傾斜影像,使得它們具有在虛擬三維空間中的位置和姿態數據,至此傾斜影像即可進行實時量測,每張斜片上的每個像素對應真實的地理坐標位置。內業處理采用Smart 3D作為數據處理軟件,Smart 3D能夠以一組對靜態建模主體從不同的角度拍攝的數碼照片作為輸入數據源,加入各種可選的額外輔助數據:攝像頭的屬性(焦距、傳感器尺寸、主點、鏡頭失真),照片的位置(如GPS),旋轉照片(如INS),控制點等信息,無須人工干預,即能輸出高分辨率的帶有真實紋理的三角網格模型,生成輸出的三維網格模型能夠準確精細地表現出建模主體的真實色澤、幾何形態及細節構成,從而完成傾斜攝影數據到三維模型的過程。圖像到三維模型建立流程如圖6所示。
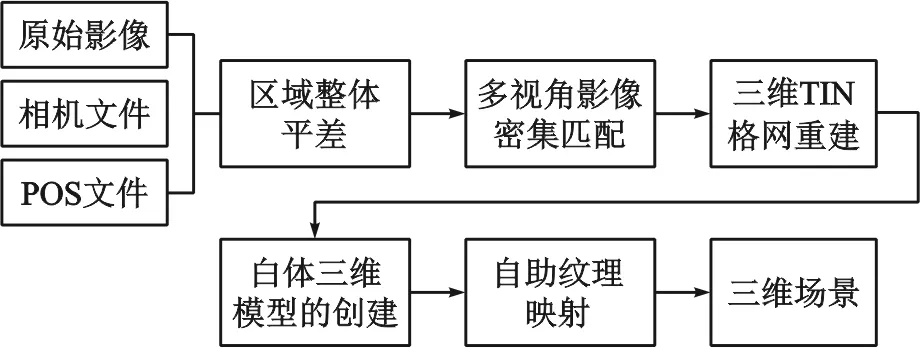
圖6 圖像到三維模型建立流程
4 總 結
兩人一組的外業測量小組采用常規的測量方法,每個月的作業量在 0.2 km2左右,若使用無人機低空傾斜攝影測量技術,一個外業組一天的航拍面積就可達 5 km2,外業效率提高了數百倍。將無人機低空傾斜攝影測量技術應用于實際地籍測量項目中取得了極好的效果,該方法大大提高了工作人員的外業效率,有廣闊的應用推廣前景。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21