水下無人潛航器無動力下潛彈道分析*
2019-07-08 01:55:18
艦船電子工程 2019年6期
(中船重工第七一〇研究所 宜昌 443000)
1 引言
隨著海洋環境的變化,以及對海洋各項科考事業的開展。水下潛航器,尤其是無人潛航器的發展越來越迅猛。其中在深海考察作業中,由于大水深對于潛航器的總體要求高,在下潛過程中多采用無動力下潛的方式來使得潛航器到達預定的海深,當深度傳感器檢測到預定水深深度的時候,潛航器動力電上電,螺旋槳及舵板開始運動,潛航器開始可考作業。本文從理論分析的方式入手,深入分析了6000m水深潛航器無動力下潛過程中的運動參數[1-2]。
2 無動力下潛過程分析
深海潛航器的最大工作水深為6000m,為了節省能源,從水面到深海作業區數千米海深的路程中不使用動力下潛方式,而采用無動力下潛運動的方式完成下潛過程。無動力下潛運動是指在水面平衡(即重力與浮力基本平衡)的狀態下,在其艏部加載一個下潛壓載(重物)使潛航器帶有一個大縱傾角下潛。在下潛的過程中,潛航器的舵板打至下潛舵位置,并在試驗過程中摸出合適的下潛舵角。如圖1為潛航器下潛過程中的受力分析圖。
潛航器無動力下潛過程中,艏部有一個額外的下潛壓載,提供主要的下潛負浮力,此時舵板提供一個下潛的補充角度,由于水壓的推進,以及對下潛過程中航行器姿態的要求,可以通過姿態傳感器的監測,調動潛航器中控程序來調整舵板的角度,來調節航行器的姿態。直至航行器姿態參數達到預設值。
航行器在無動力下潛過程中會有縱向的運動。潛航體艏部裝有一個弧板弧板的角度可調。由于在下潛的過程中,弧板的角度與潛航器的中線偏移一個夾角,在潛航器下潛的過程中會弧板受到一個側推力的作用,會有縱向的速度。下潛速度和縱向速度的合速度會使得潛航器在水下呈現螺旋下潛的姿態,如圖1所示,并最終達到預定水深。在預定水深附近,潛航器上動力電,螺旋槳及舵板開始運行,調整潛航體姿態為正常姿態[3-5]。
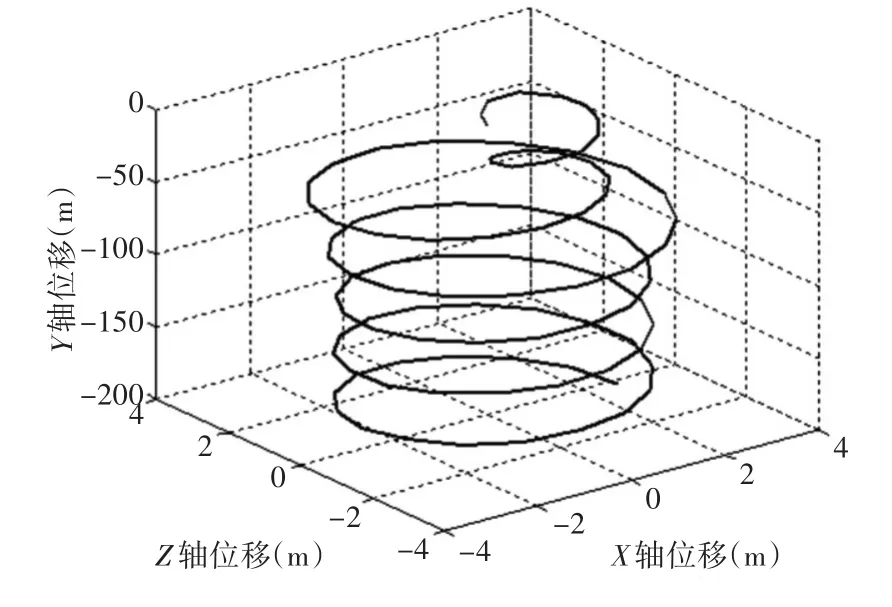
圖1 螺旋下潛姿態
由潛航體螺旋下潛的彈道仿真分析圖可以看出(圖1),由于初速度小等原因,潛航體在螺旋下潛之處會處于一個不穩定的狀態;隨著下潛到一定深度,速度穩定,潛航體沿著一定的螺旋下潛半徑下潛。姿態也處于穩定狀態。本文以6000m水深為假設條件,對潛航體螺旋下潛的過程進行理論分析。
3 無動力下潛理論分析
深海潛航器無動力下潛的受力情況如圖2所示,潛航器艏部有一個重力壓載P,它是下潛的主動因素,初始平衡條件下的潛航器正浮力,無動力下潛時會有縱向速度u和垂向速度w,它們的合速度為U,經過短時間的過渡過程,潛航器進入穩態,其無動力下潛的穩態運動方程如下[6~9]。
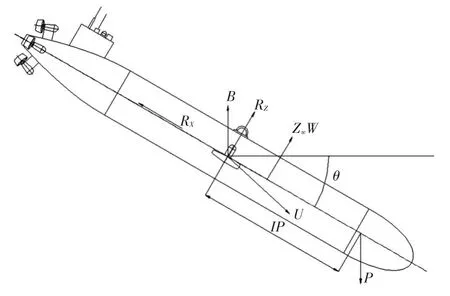
圖2 無動力下潛受力圖
潛航器x方向:
其中θ為潛航器無動力下潛縱傾角,而潛航器x方向的阻力的計算因子為
kX=0.5ρ·AX·CX=0.5×1025×0.608×0.18 =56.09kg/m
同理,潛航器z方向的力平衡方程為
(P-ΔB)·cosθ+Zww-ΔBcosθ-Rz=0
其中RZ=kZ·w2為潛航器垂向阻力,而z方向的阻力的計算因子為
kZ=0.5ρ·AZ·CZ=0.5×1025×5.57×0.76=2170kg/m
力矩方程為
-P·cosθ·LP+ΔB·hsinθ+Mww-mg·hsinθ=0
其中LP=2.475m為下潛壓載距離重心的縱向距離,m為潛航器水中總質量,h為穩性高,為浮心與重心之間的垂向距離。通過這三個方程就可以計算潛航器無動力下潛的姿態,如速度u、w、U,潛航器縱傾角θ、沖角α以及潛航器在大地坐標系中的垂向下潛速度:
UZ=-usinθ+wcosθ
三個方程變量的解耦比較困難,計算中采用試算法,先預先假定潛航器的縱傾角θ,然后迭代計算各變量,編程計算很快可收斂得到結果,計算程序列表如表1、2。速度導數Z′w=-0.026,速度力矩導數M′w=0.008。
潛航器正浮力 ΔB=5kg、10kg和15kg,潛航器水中總質量1200kg,無動力下潛壓載的重量分別取為P=20kg、25kg和30kg,潛航器的穩性高取h=0.025m,計算結果如表2所示。
從計算中可以看出,穩性高不變下,下潛壓載重量越大,潛航器縱傾角和下潛速度越大。在下潛壓載重量不變情況下,潛航器正浮力越大,其垂向下潛速度變小,但差別不明顯,即正浮力對無動力下潛速度的影響不明顯,在下潛壓載重量較大時更是如此。根據潛航器的設計情況,取下潛壓載重量為P=30kg,根據計算,潛航器的垂向下潛速度為0.72m/s,縱向速度為1.3m/s左右,縱傾角為28°左右(隨正浮力有輕微差別),潛航器無動力下潛的速度和姿態較平穩。
潛航器到達6000m所需時間為6000/0.72=8333s=2.3h,即2h 18min左右。
4 無動力下潛水平回轉運動特性的分析
為了節省大深度條件下非工作過程(下潛和上浮)所需的能源和時間,深海潛航器采用無動力大傾角下潛和上浮方式。為了在大深度下潛過程中,潛航器無動力下潛到指定水域地點的海底,節省重新回到預定工作位置的時間和能源,潛航器采用與無動力下潛壓載合一的回旋弧板(如圖3)的方法,來使潛航器在無動力下潛過程中做等效垂直的螺旋線運動,使潛航器在海底的工作地點就是水面的指定布放位置[10~13]。
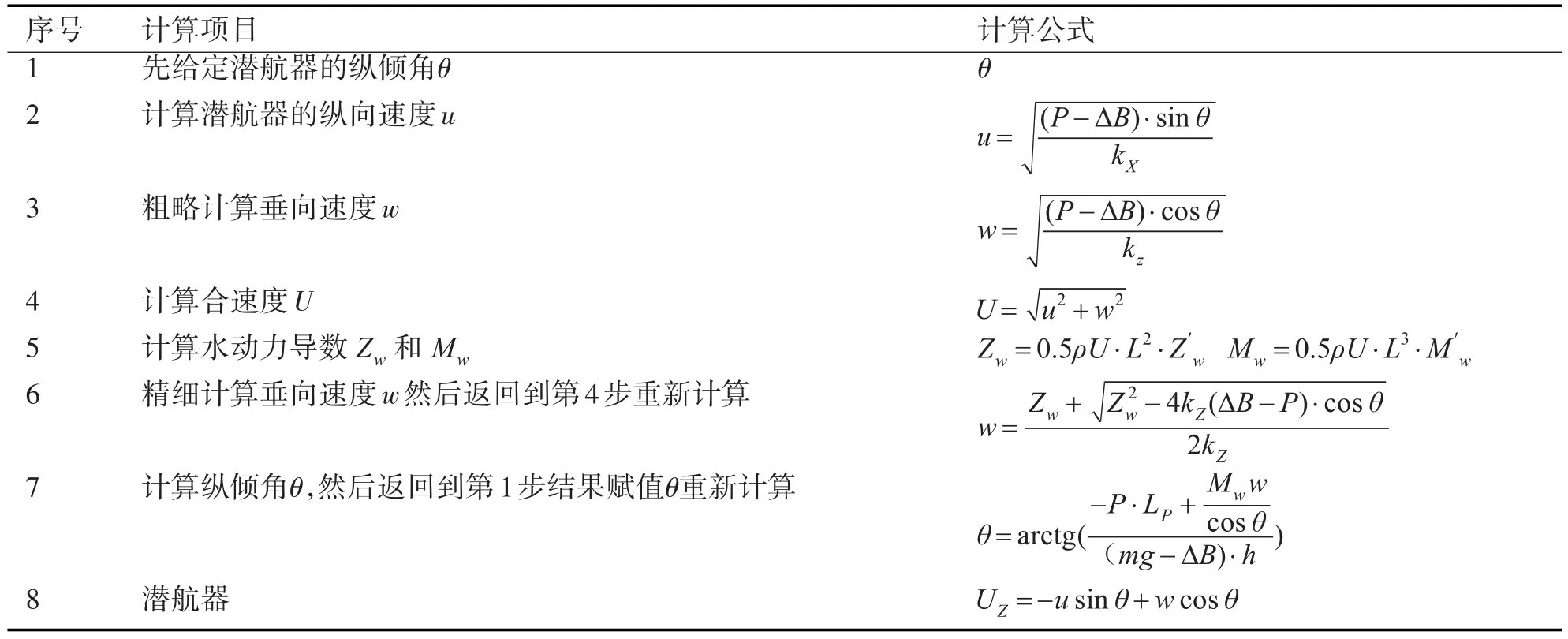
表1 潛航器無動力下潛計算表

表2 潛航器無動力下潛計算結果
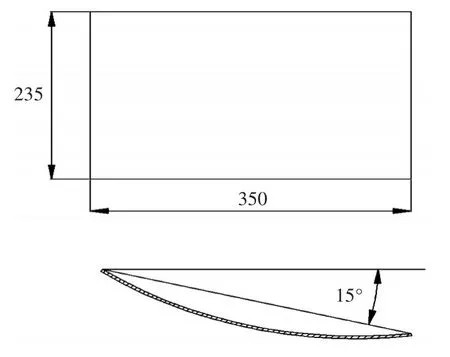
圖3 弧板尺寸
如圖4所示,在下潛壓載上連接一個弧板,該弧板伸出到潛航器外,當潛航器無動力下潛時,潛航器縱向速度與弧板之間的攻角為15°,該攻角將會在弧板上產生一個側向升力,該側向力將會使潛航器做無動力回轉運動,配合無動力下潛運動,潛航器就會產生垂向的螺旋線運動。
潛航器無動力定常回轉(左回旋)的線性運動方程如下:
Yv·v+Yr·r+YP=mUrNv·v+Nr·r+LP·YP=0
整理可得:
Yv·v+(Yr-mU)·r=-YPNv·v+Nr·r=-LP·YP


表3 水平面運動方程相關參數
將表3中相關參數帶入計算,線性條件下潛航器的無因次回轉角速度為
D=62×L=17.7×7=124m

5 結語
1)潛航體在螺旋下潛過程之處,處于一個不穩定狀態。由于初速度低,側推力小的緣故,運動軌跡會呈現雜亂現象;當下潛到一定深度時候,下潛速度穩定,側推力所引起的螺旋運動規律也會穩定,使得潛航體下潛軌跡穩定。
2)潛航體穩性高不變情況下,下潛壓載重量越大,潛航器縱傾角和下潛速度越大。在下潛壓載重量不變情況下,潛航器正浮力越大,其垂向下潛速度變小,但差別也不明顯,即正浮力對無動力下潛速度影響不明顯,在下潛壓載重量較大時候更是如此。
3)側推力決定了螺旋下潛的速度以及回轉半徑,側推力與弧板的表面積近似為正比例關系,但同時也由弧板與潛航體中軸線的偏轉夾腳有關系。同時側推力大小也影響了下潛速度,并導致下潛至預定深度的時間。通過上面的理論公式分析,可以對不同總體配置進行計算,并選出最優化的方案。
