淺水效應對船舶的影響及經驗估算方法
2019-07-10 07:14:08張偉
船舶與海洋工程 2019年3期
張 偉
(上海惠生海洋工程有限公司,上海 201210)
0 引 言
對于在淺海、內河和港口等淺水區域航行的船舶而言,淺水效應是普遍存在的現象。以往的船舶因尺度較小、航速相對較低,淺水效應一般沒有給其安全航行和操縱性帶來特別大的影響,因此淺水效應沒有引起普遍關注。
近幾十年來,隨著經濟全球化的迅猛發展,國際貨運需求量不斷增加,船舶逐漸朝大型化和快速化方向發展。在此情況下,船舶在港口等淺水區域遭受的淺水效應越來越顯著,不僅影響其安全航行和操縱性,而且對其功率和經濟性有重要影響。由此,淺水效應得到港口、航道相關方和船東等越來越多的重視。
1 淺水效應
對于存在淺水效應問題的航道,通常根據航道的特點將其分為2類:對于僅水深受限制的航道,稱其為淺水航道,如淺海區域和湖面寬廣的湖泊等;對于水深和寬度都受限制的航道,稱其為限制航道,如內河和運河航道等。
由于航道尺寸的限制,船舶在淺水航道或限制航道中航行時會出現下沉及縱傾變化、阻力增加和操縱性變差等現象。本文主要對下沉及縱傾變化和阻力增加這2種淺水效應進行分析。
1.1 下沉和縱傾變化
當船舶在深水中航行時,船體周圍的水流呈三維空間的流動;當船舶在淺水航道或限制航道中航行時,由于航道受限,船體周圍的水流因受到擠壓而加速流動,由伯努利方程可知,船體周圍的流體壓力會隨之減小,從而導致船舶下沉。
此外,由于艏、艉的形狀不同,艏、艉壓力場的分布和變化情況也不同,從而導致船舶在下沉的同時發生縱傾變化。船舶的縱傾發生變化通常與船舶的初始縱傾和方形系數CB有關。BARRASS[1]根據船模試驗和實船觀測結果得出以下結論。
1) 對于初始縱傾為0的船舶:當CB> 0.7時,艏傾;當CB< 0.7時,艉傾;當CB= 0.7時,無縱傾變化。
2) 對于初始縱傾不為0的船舶:當初始狀態為艉傾時,艉傾加劇;當初始狀態為艏傾時,艏傾加劇。
這種以CB= 0.7為分界描述船舶縱傾問題所得結論在工程上是不恰當的,但可為定性描述縱傾的變化情況提供參考。總體來說,根據伯努利方程,當水流速度增大時,船體周圍水流的壓力會相應地減小。因此,可根據該原理認為浮心位置在船中前時船舶可能發生艏傾,浮心位置在船中后時船舶可能發生艉傾,這與BARRASS[1]的結論是一致的。
1.2 阻力增加
船舶在淺水航道或限制航道中航行時會出現下沉和縱傾變化的現象,同時船體興波作用會增大,導致船舶受到的阻力比在深水中大。隨著淺水效應的加劇,這種現象通常會更加明顯。
1) 黏性阻力。船舶在淺水航道或限制航道中航行時,由于船體周圍水流的速度增加,同時船舶下沉導致其濕表面積增大,使得船舶受到的摩擦阻力比在深水中航行時受到的摩擦阻力大。此外,由于船體周圍的水流與船體的相對運動速度增大導致壓力減小較快,船體表面形成較大的壓力梯度,因此黏壓阻力也有所增大。
2) 興波阻力。通過船模試驗和實船觀測發現:在淺水區域航行的船舶遭受的阻力先隨著航速的增加而急劇增大,然后從某個特定的航速點開始隨著淺水效應的加劇(航速繼續增加或吃水繼續下降)而從阻力峰值降下來。該現象與波浪理論對淺水效應的分析中描述的現象基本一致,主要是由興波阻力變化引起的。
影響興波阻力的主要參數是水深弗勞德數FrH。根據波浪理論,通常依據FrH船速劃分為3個區段[2],即:亞臨界速度區,FrH< 1.0;臨界速度區,FrH=1.0附近;超臨界速度區,FrH> 1.0。
當船舶在亞臨界速度區的淺水中航行時,其興波阻力隨著淺水效應急劇增大;當船舶開始進入超臨界速度區時,其興波阻力反常地出現減小的情況。
對于淺水效應而言,遇到的實際情況通常是在亞臨界速度區航行的問題。因此,這里主要分析亞臨界速度區內的淺水效應問題。
2 淺水效應發生的條件
由上述分析可知,船舶在進入淺水航道或限制航道時可能會遭受淺水效應。船模試驗和實船觀測結果表明:對于淺水航道,影響淺水效應的因素主要是水深和航速;對于限制航道,影響淺水效應的因素除了水深和航速以外,還有航道寬度。
2.1 水深
水深是影響淺水效應的主要因素之一,通常用水深吃水比H/T來衡量不同尺度船舶的淺水效應。國際航運協會(The World Association for Waterborne Transport Infrastructure, PIANC)[3]以H/T為參數對淺水效應進行劃分,其中:深水,H/T> 3.0;中深水,1.5 <H/T< 3.0;淺水,1.2 <H/T< 1.5;超淺水,H/T< 1.2。
此外,PIANC描述了船舶在不同情況下遭受的淺水效應程度:在中深水情況下,淺水效應開始顯現;在淺水情況下,淺水效應變得非常明顯;在超淺水情況下,由于船底的水流幾乎全部被阻滯,導致淺水效應成為船舶操縱的主要影響因素。
應指出,上述劃分方式存在一定的局限性,但作為一種初步劃分和定量衡量水深對淺水效應影響的方法,還是有一定的參考意義的。
2.2 航速
航速是影響淺水效應的另一個主要因素。對于同一艘船,即使水深相同,在不同航速下受到的淺水效應也是不同的。淺水效應可能在高航速下很大,而在低航速下很小或沒有。對于不同船型而言,由于設計航速不同,導致其受到的淺水效應不同。由此可知,簡單地采用H/T來衡量所有船型的淺水效應是不太合理的。
BARRASS[1]根據船模試驗和實船觀測結果,引入水深影響系數FD來描述各類型船舶進入淺水區域的時間,有

式(1)中:T為船舶吃水,m;k為與船型有關的恒定值。
不同船型對應不同的水深影響系數,其中:對于超大型油船,FD=5.68T;對于雜貨船,FD=7.07T;對于客船,FD=8.25T;對于客滾船,FD=9.20T;對于利安得級巡洋艦,FD=12.04T。當船舶航行至水深小于對應于該船型的FD的水域時,已進入淺水區域,需開始考慮航速對淺水效應的影響。
上述結論很好地體現了航速對淺水效應的影響。由于不同船型的航速有所不同,其水深影響系數也不相同,因此在考慮淺水效應時除了需考慮水深的影響以外,還需考慮航速的影響。
2.3 航道寬度
對于在航道寬度受限的限制航道中航行的船舶,除了考慮水深和航速對淺水效應的影響以外,還需考慮航道寬度對淺水效應的影響。BARRASS[1]引入寬度影響系數FB來描述各類型船舶進入寬度受限區域的時間,有

式(2)和式(3)中:b為船寬,m;CB為方形系數;k為與船型有關的恒定值。
不同船型對應不同的寬度影響系數,其中:對于超大型油船,FB= 8.32b;對于雜貨船,FB= 9.50b;對于沿海拖船,FB= 12.69b;對于利安德級巡洋艦,FB= 13.75b。當船舶航行至航道寬度小于對應于該船型的FB的水域時,已進入寬度受限區域,需開始考慮航道寬度對淺水效應的影響。
由上述結論可知,不同船型的寬度影響系數是不同的,這是不同船舶的航速不同導致的,再次表明航速對淺水效應有重要影響。
2.4 淺水效應發生的條件
劃分和衡量淺水效應的方法有很多,根據船模試驗和實船觀測結果得到的統計分析結果,一般可采用H/T、FrH和B/b等3個無因次參數來判斷淺水效應是否發生。當船舶遭受以下3種情況[1,3-4]之一時,就需開始考慮淺水效應是否已發生。式(4)~式(6)中:H為航道水深,m;B為航道寬度,m;T為船舶吃水,m;b為船寬,m;CB為方形系數;υ為船舶航速,m/s;g為重力加速度,m/s2。


3 淺水效應對航行安全的影響
雖然淺水效應是一直存在的,但因以往船舶的尺度相對較小,淺水效應不是很顯著,對船舶的影響不是很大,并沒有引起廣泛重視。然而,近些年隨著船舶尺度的不斷增大和航速的不斷提高,船舶在進入港口和航道時遭受的淺水效應越來越顯著,對船舶安全航行的影響越來越大。這種影響導致海損事故(尤其是觸底事故)不斷發生。
3.1 觸底導致案例分析[5]
1992年8月7日,載有1824名乘客和1003名船員的英國籍郵船“伊麗莎白女王2號”在航行至美國的卡蒂杭克島附近海域時發生觸礁事故。此次觸礁的主要原因是礁石的存在導致當地海域的水深比海圖上標記的水深淺很多。事故調查結果顯示,若當時采取適當的措施,該船完全可避免觸礁事故的發生。
在發生觸礁事故之前,該船吃水約9.8m,礁石在水面以下約10.5m,考慮到當時有一定的漲潮現象,正常情況下該船應該能安全駛過該礁石。但是,為保證船舶準時到達下一港口,該船將航速提高到約25kn。由于該船沒有提供與不同淺水效應情況下引起的下沉有關的文件,船長估計該船可能會遭受約0.5m的下沉,而實際情況是船長嚴重低估了淺水效應的影響。調查結果顯示,該船在25kn航速下航行時可能增加了1.5m以上的下沉量(包括縱傾的影響),正是這部分被嚴重低估的淺水效應導致了此次觸礁事故的發生。
類似“伊麗莎白女王2號”的觸底事故還有很多。港口當局、船東等對此高度重視,出臺了許多法規。例如,美國聯邦法規第33條 (CFR33)[6]規定,對于未在整個貨油艙長度范圍內設置雙層底的油船,船東或操船方應提供相應的船底凈空隙(Under-Keel Clearance, UKC)指南。對于確保船舶安全航行和安全進出港而言,UKC是一個非常重要的概念。
3.2 船底凈空隙UKC
UKC是指通航時船底與水底之間的凈空隙。由于該值不僅影響船舶的通航安全,而且影響港口航道的正常運營和經濟性,因此逐漸得到船東、操船方和港口等相關方的重視。船舶在淺水區域航行和進出港口時需遵循相關組織機構或港口當局的有關規定,以保證船舶安全航行和進出港。對于UKC的大小,不同組織機構有不同的建議或規定。ICORELS(International Commission for the Reception of Large Ships)[7]提供的船舶在不同海域的UKC建議值dUKC如下。
1) 開敞水域:暴露于強烈和長順浪或艉斜浪,且航速可能比較高的區域,dUKC/T≈0.2。
2) 等候水域:暴露于強烈和長涌浪的區域,dUKC/T≈0.15。
3) 航道:暴露于強烈和長涌浪的區域,dUKC/T≈0.15。
4) 航道:較少暴露于涌浪的區域,dUKC/T≈0.10。
5) 操縱和停泊水域:暴露于涌浪的區域,dUKC/T≈0.10~0.15。
6) 操縱和停泊水域:遮蔽區域,dUKC/T≈0.07。
值得注意的是,在考慮UKC時,除了要考慮靜態影響因素以外,還需考慮動態影響因素,如回航和風壓引起的橫傾、船舶六自由度運動等,以及淺水效應引起的下沉和縱傾。
PIANC[8]將UKC的各靜態影響因素和動態影響因素劃分為水面影響因素、船舶影響因素和水底影響因素等3類(見圖1)。
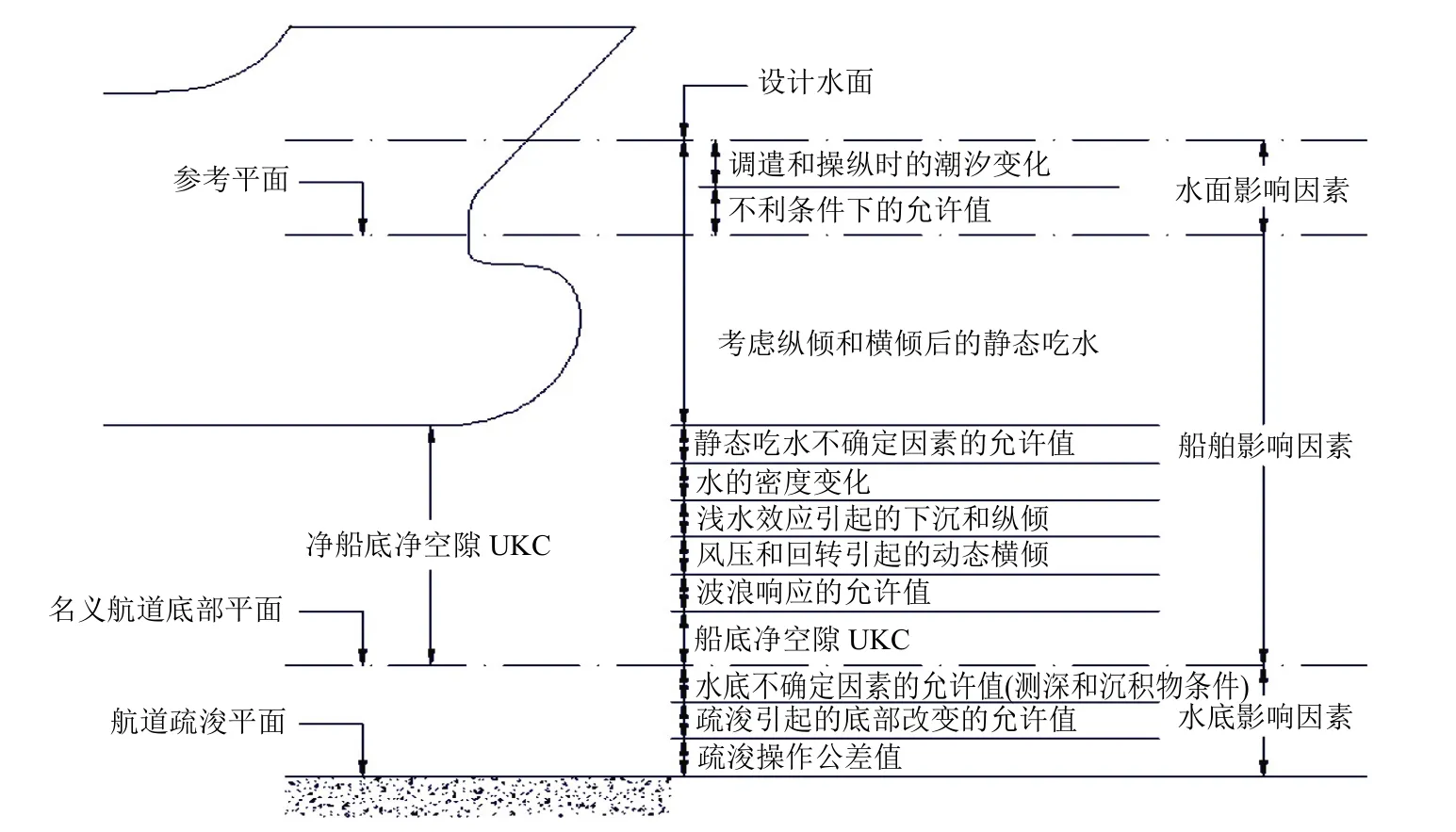
圖1 航道水深影響因素
由圖2可知,“伊麗莎白女王2號”觸礁事故是水底影響因素(未標記的高于水底的礁石)與船舶影響因素(被嚴重低估的淺水效應引起的下沉)共同作用導致的。
船舶在進出港時,通常需結合不同的潮汐窗口期,考慮允許的最大下沉,選擇合適的航速安全進出港。
4 下沉的經驗公式估算法
對于船舶淺水效應引起的下沉,相關研究人員已結合船模試驗和實船觀測進行很多研究,有很多經驗公式方法可供借鑒,其中比較受認可的是BARRASS方法[1]。BARRASS根據船模試驗和實船觀測情況對淺水效應引起的下沉進行深入研究,該方法的適用范圍為:方形系數CB= 0.5~0.9;水深吃水比H/T=1.1~1.4。
該方法基本上覆蓋了常用的船型,同時H/T覆蓋了比較典型的淺水效應區間,因此具有實用意義。為保證使用的靈活性,BARRASS給出以下2種計算方法。
4.1 計算方法1
1) 對于在淺水航道和限制航道中航行的船舶,其下沉量的估算式為

式(7)和式(8)中:H為航道水深,m;B為航道寬度,m;T為船舶吃水,m;b為船寬,m;CB為方形系數;υ為船舶航速,m/s。
2) 對于在限制航道中航行的船舶,B為航道寬度;對于在淺水航道中航行的船舶,沒有實際的航道寬度,此時采用寬度影響系數來確定B的值,用于計算船舶下沉量。

4.2 計算方法2
1) 對于在限制航道中航行的船舶,其下沉量的估算式為

式(10)適用于b×T/B×H在0.1~0.265的情況。
2) 對于在淺水航道中航行的船舶,其下沉量的估算式為

由式(10)和式(11)可知,在該計算方法中,通常可認為船舶在限制航道中的下沉量約是在淺水航道中的下沉量的2倍。
BARRASS法采用非常少的參數即可初步估算出淺水效應引起的船舶下沉量。尤其是計算方法2,只需知道方形系數和航速即可進行初步預估,對于快速估算淺水效應而言是非常方便的。
5 阻力的經驗公式估算法
對于淺水效應情況下的阻力估算,通常采用的方法為:根據經驗公式估算深水情況下的阻力;在此基礎上,對深水情況下的阻力進行淺水效應修正。
深水阻力計算可采用被廣泛應用且適用于多種船型的Holtrop & Mennen法[9-10]。
淺水效應修正有很多經驗公式方法,通常采用速度修正或阻力修正的方法。這里主要介紹比較常用的Schlichting 法[4]和 Lackenby 法[11]。
5.1 Schlichting法
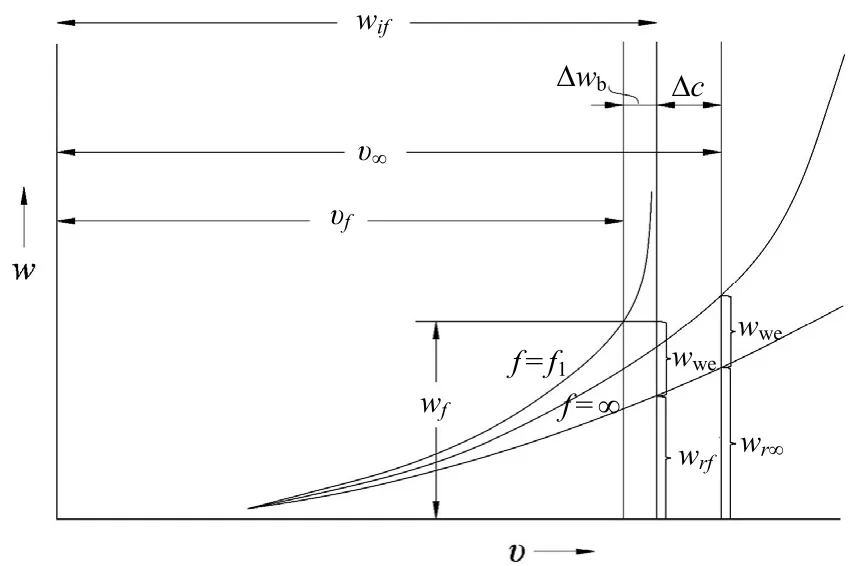
圖2 Schlichting法的計算流程
Schlichting法是根據1艘重型驅逐艦和2艘輕型驅逐艦的系列船模試驗數據總結出來的方法,用來研究船舶在北海和波羅的海等限制區域航行時遭到的淺水效應問題。
在進行淺水效應阻力修正時,Schlichting法給出以下2個基本假定。
1) 興波阻力保持不變。船舶航行于淺水區域時,由波浪理論可知,相同波長的船行波的傳播速度會下降,Schlichting法假定此時興波阻力保持不變。在實際計算時,常用剩余阻力代替興波阻力。
2) 航速下降由船行波速度降低和存在回流速度2部分造成。淺水區域航速下降由2部分造成,即:根據波浪理論得到的船行波在淺水區域航行時速度的下降Δc;由于航道截面受限引起的回流速度Δwb,該值可根據船模試驗得到。
根據這些假定,在應用Schlichting法估算淺水阻力時主要采用作圖法(見圖2),具體計算流程為:
1) 在已知水深的總阻力曲線和摩擦阻力曲線上分別截取深水船速υ∞對應的摩擦阻力wr∞和剩余阻力wwe;
2) 在船行波速度降低修正圖(見圖 3)中根據已知的水深f和船速υ∞得到的水深弗勞德數(橫坐標)查得(縱坐標),從而得到淺水船行波速度wif;
3) 在摩擦阻力曲線上截取wif對應的摩擦阻力wrf,并向上量取步驟1)中得到的剩余阻力wwe;
4) 在回流速度修正圖(見圖4)中根據已知的船舶水下橫剖面積Am和航道水深f得到的航道截面比(縱坐標)查得(左邊曲線),從而得到fυ;
5) 將步驟3)中得到的總阻力wf平移至航速fυ處,即可得到該航速下的總阻力。
采用上述方法即可得到各航速下的阻力,從而得到淺水總阻力曲線。
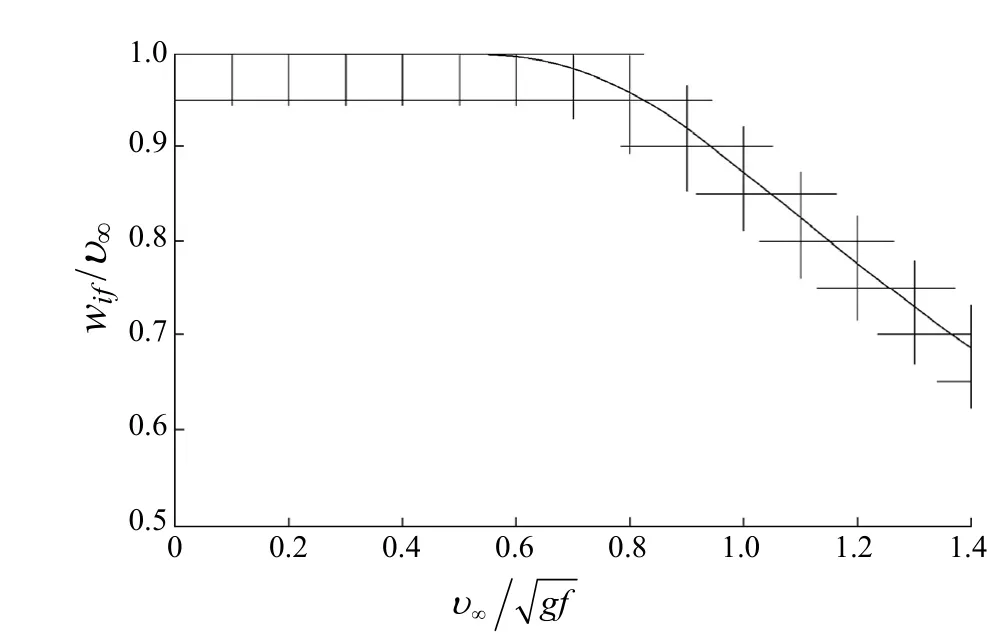
圖3 船行波速度降低修正圖
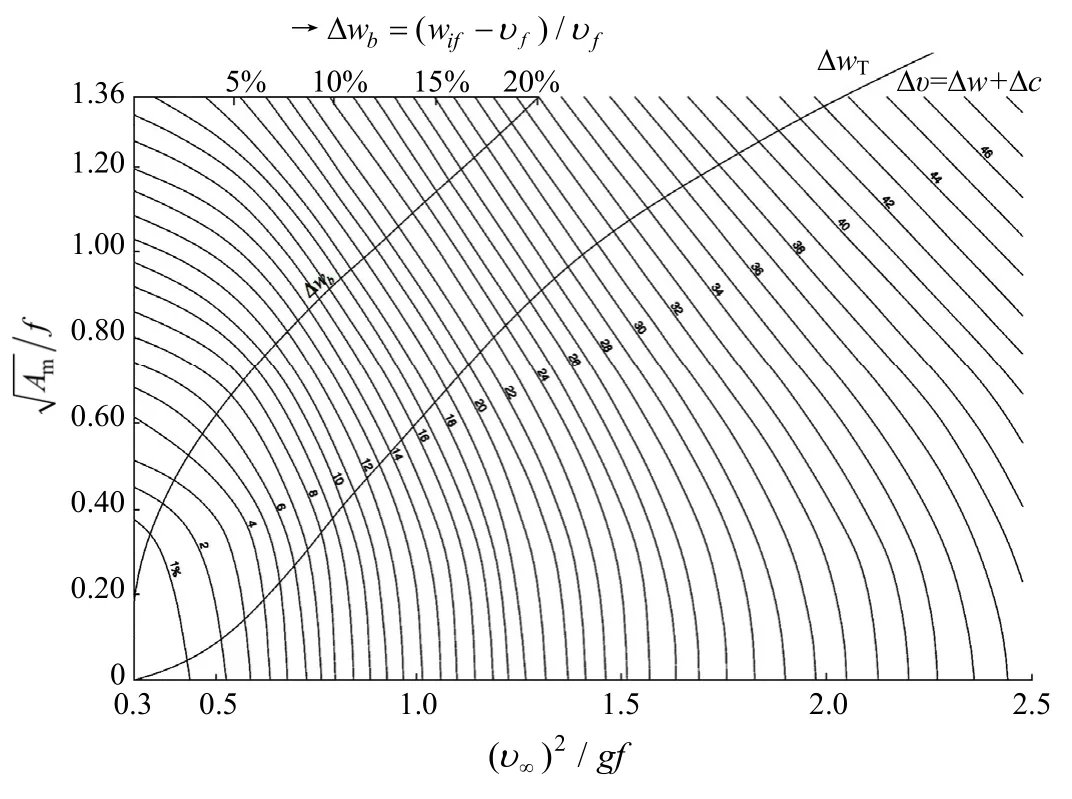
圖4 回流速度修正圖
應指出,Schlichting法的假定雖然存在很多爭議,但能對船模試驗結果進行很好的分析和回歸,進而提出一套簡單有效的淺水阻力修正方法。
5.2 Lackenby法
Lackenby法是在Schlichting法的基礎上作進一步分析,根據Schlichting法在船模試驗中得到的數據修改理論方法,得到一個適于在淺水情況下對速度進行修正的公式,即

式(12)中:Am為船舶水下橫剖面面積,m2;H為航道水深,m;g為重力加速度,m/s2;υ為船舶在深水區域的航速,m/s;Δυ為船舶在淺水區域的航速下降值,m/s。
此外,在進行試航航速修正時,國際拖曳水池會議(International Towing Tank Conference, ITTC)也推薦采用Lackenby法。
6 結 語
本文通過給出淺水效應的定義,提出淺水效應發生的條件,提供一套快速估算淺水效應的經驗公式方法,實現對淺水效應的快速預估。當前在設計船舶時一般會在艏部和艉部各設置一臺測深儀探測水深,船長可結合儀器的數據和淺水效應估算結果采取應對措施。船長通過培訓獲得有關淺水效應的知識是十分有益的,只要對淺水效應足夠重視,就能避免很多觸底事故發生,從而保證船舶在淺水區域安全航行。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
核科學與工程(2021年4期)2022-01-12 06:30:26
船舶(2021年4期)2021-09-07 17:32:22
當代陜西(2021年2期)2021-03-29 07:41:24
今日農業(2020年19期)2020-12-14 14:16:52
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學物理·高中(2016年12期)2017-04-22 11:53:03
中國塑料(2016年3期)2016-06-15 20:30:00
航海(2005年4期)2005-04-29 00:00:00