無速度傳感器永磁同步電機轉(zhuǎn)速估計的研究
2019-07-11 07:09:36彭雨豪陳超波黃姣茹
自動化與儀表 2019年6期
彭雨豪,陳超波,黃姣茹
(西安工業(yè)大學 電子信息工程學院,西安710021)
目前,永磁同步電機在人們?nèi)粘I钪斜夭豢缮伲蔀檎麄€工業(yè)革命的核心。隨著科學技術(shù)的進步,各個領(lǐng)域研究的快速發(fā)展,人們對電機性能的要求越來越高。然而無論如何使用電機,都需要精確地掌握電機的轉(zhuǎn)速和轉(zhuǎn)子位置,以便監(jiān)測系統(tǒng)的穩(wěn)定性并加以控制。當前,在傳統(tǒng)的永磁同步電機控制中,要檢測到電機的轉(zhuǎn)速與轉(zhuǎn)子位置,就必須在電機軸上安裝一個速度傳感器[1-2]。如果增加機械傳感器,會使電機軸體變大,相關(guān)的維修變得復雜,且容易受惡劣環(huán)境的影響,導致系統(tǒng)運行穩(wěn)定性變差。這使得無速度傳感器技術(shù)有了發(fā)展空間[3-4]。
近年來,誕生了多種智能估計算法,文獻[5]提出的動態(tài)轉(zhuǎn)速估計法,包含轉(zhuǎn)子磁通估計和轉(zhuǎn)子反電勢估計2 種方法,存在對電機的參數(shù)變化敏感等缺點;文獻[6-7]提出的神經(jīng)網(wǎng)絡(luò)法,使用誤差反向傳播算法的自適應(yīng)律估計轉(zhuǎn)速,電流模型轉(zhuǎn)子磁鏈觀測器被神經(jīng)網(wǎng)絡(luò)所替代,電機參數(shù)來源于網(wǎng)絡(luò)的權(quán)值,但計算量大,實現(xiàn)其硬件尚有難度。還有如滑膜觀測器法[8-10]、自適應(yīng)估算法[11-13]等,同樣計算過程較為復雜,需要具備數(shù)據(jù)處理較好的硬件設(shè)施。基于此,提出了算法簡便且可保證精度的估算方法,即基于擴展卡爾曼濾波方法。
1 無速度傳感器永磁同步電機系統(tǒng)模型
永磁同步電機的數(shù)學模型不僅是一個非線性系統(tǒng)模型,同時也是一個強耦合的多變量系統(tǒng)模型。為建立正弦波永磁同步α-β 軸兩相坐標系,必須滿足一定條件,假設(shè):①忽略電機鐵心的飽和;②不計電機中的渦流和磁滯損耗;③電機的電流為對稱的三相交流正弦波電流。
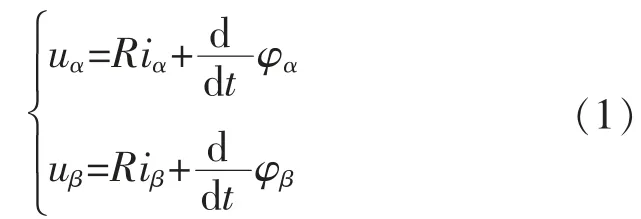
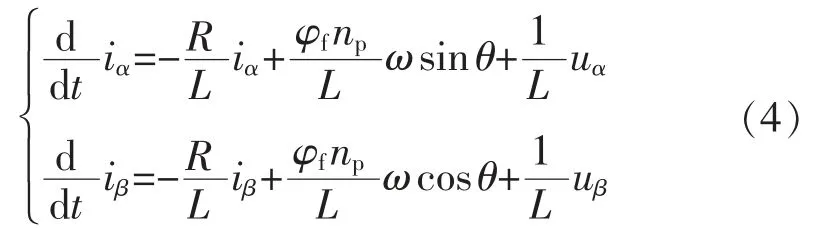
由電機數(shù)學模型的轉(zhuǎn)換關(guān)系,可得永磁同步電機α-β 軸下的數(shù)學關(guān)系為
電壓方程
磁鏈方程
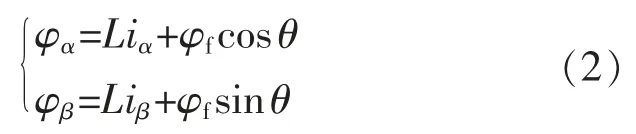
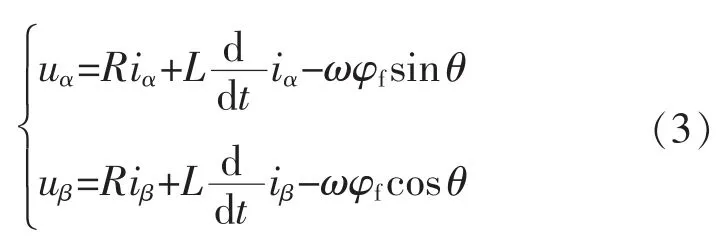
式中:uα和uβ,iα和iβ分別為兩相靜止坐標系下的定子電壓、定子電流;R 為定子電阻;L 為定子電感;φf為轉(zhuǎn)子磁鏈;ω 為機械轉(zhuǎn)子角速度;θ 為轉(zhuǎn)子位置角。
式(3)為根據(jù)數(shù)學建模得出的永磁同步電機參數(shù)關(guān)系式,將其改寫為卡爾曼濾波模型的形式:
取
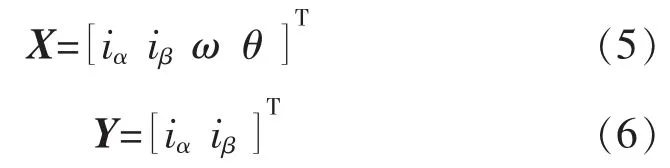
式中:X 為狀態(tài)變量;Y 為系統(tǒng)觀測變量。
由于永磁同步電機系統(tǒng)中受到環(huán)境變化、電壓波動以及存在測量噪聲等干擾因素,因此在系統(tǒng)模型中考慮噪聲Wk和Vk。建立離散化后的系統(tǒng)模型為

其中
葉曉曉看著自己的父親,他暴跳如雷,兩手鮮血淋漓的,他不知道,為了買那只剃須刀,葉曉曉舍棄了三條裙子和一件T恤。那一刻,她心里也有些許的恨意升上來,眼淚也一滴一滴地掉下來,滴到她的膝蓋上,滴到抱著膝蓋的手指上。
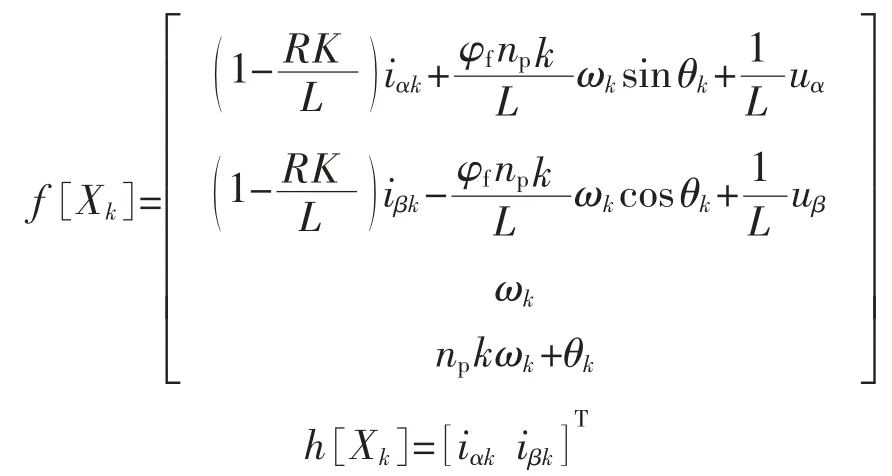
式中:Xk為k 時刻的狀態(tài)變量;Yk為k 時刻的觀測變量;f[Xk]為非線性函數(shù);h[Xk]為線性函數(shù);np為電機的極對數(shù);Wk和Vk分別為系統(tǒng)噪聲和觀測噪聲,且服從均值為零、方差各為Q和S 的不相關(guān)高斯白噪聲。
2 擴展卡爾曼濾波算法
在實際情況中,系統(tǒng)總是有不同程度的非線性關(guān)系。針對非線性系統(tǒng),卡爾曼濾波已不再適用,因此推廣出擴展卡爾曼濾波算法。其核心思想是,首先圍繞濾波值X 將非線性函數(shù)f和h 使用泰勒展開,略去二階及以上項,得到一個近似的線性化的模型,然后應(yīng)用卡爾曼濾波完成對目標的濾波估計等處理。
在此所提出的估算方法就是基于擴展卡爾曼濾波方法,將標準卡爾曼擴展至非線性系統(tǒng)領(lǐng)域,使其可以運用到電機模型中。只需采集電機的固有信息便可準確估算出電機的轉(zhuǎn)速。
考慮離散系統(tǒng)的動態(tài)方程式(7),將非線性函數(shù)f(*)圍繞濾波值X?k做一階Taylor 展開,得到

令,

因此經(jīng)過線性化處理的狀態(tài)方程為

同理,可得線性化的觀測方程為:

其中
對線性化后的模型(9)和(10)應(yīng)用卡爾曼濾波基本方程,可得擴展卡爾曼濾波遞推方程,遞推公式如式(11)~式(15):
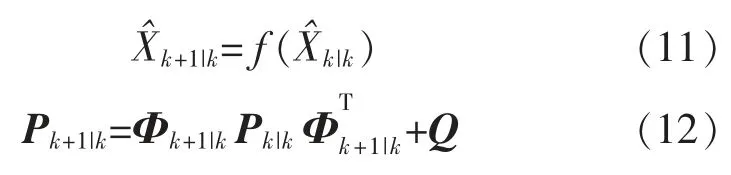
式中:I 為n 維的單位矩陣。
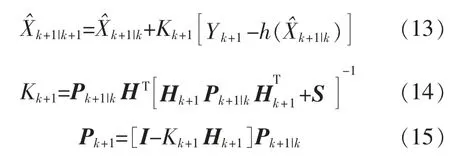
擴展卡爾曼濾波算法的流程如圖1所示。
該算法的狀態(tài)估計分為預測和校正2 部分,最優(yōu)濾波估計值=預測估計值+修正值。算法的第1 部分,通過給定系統(tǒng)的初始狀態(tài)變量,以及初始協(xié)方差矩陣進行一步預測,得出k+1 時刻狀態(tài)和協(xié)方差的估計值;第2 部分,通過測量得到的觀測值修訂一步預測所得到的估計值,計算出k+1 時刻的濾波值。其中包含狀態(tài)與協(xié)方差的更新以及卡爾曼增益的計算。如此循環(huán)2 個部分,最終得出系統(tǒng)狀態(tài)的最優(yōu)估計值。
3 仿真與分析
所使用的永磁同步電機參數(shù)見表1。永磁同步電機的轉(zhuǎn)速估計的仿真模型如圖2所示。
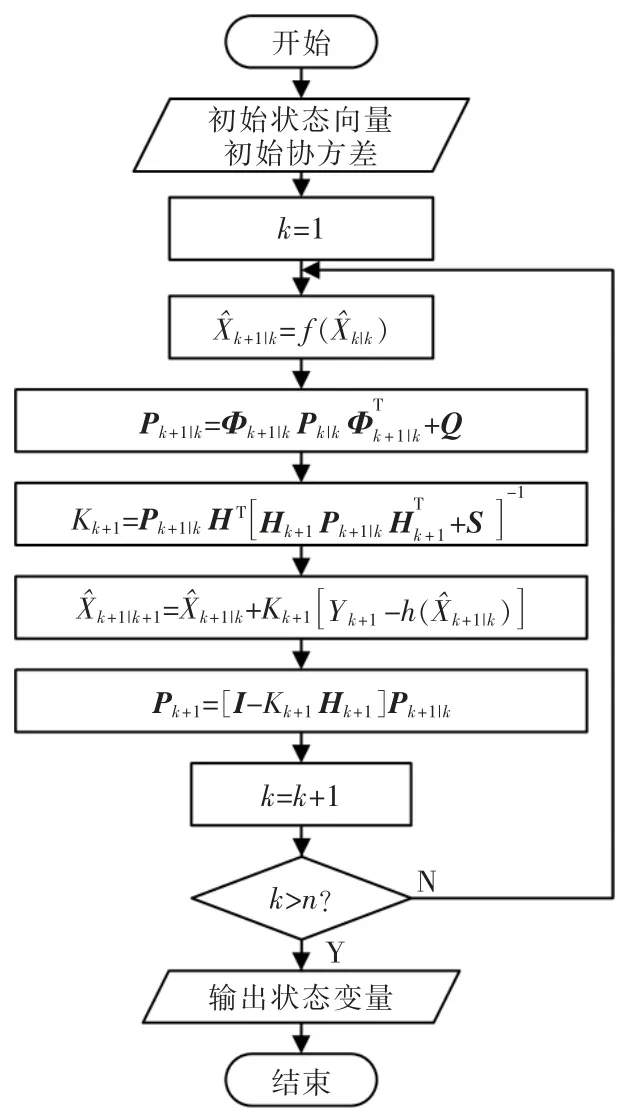
圖1 擴展卡爾曼濾波算法流程Fig.1 Flow chart of extended Kalman filter algorithm
表1 永磁同步電機系統(tǒng)參數(shù)Tab.1 System parameters of permanent magnet synchronous motor
圖2 由上下2 部分組成:上半部分為永磁同步電機模型;下半部分為擴展卡爾曼濾波算法部分,其左端輸入的是電機2 項靜止坐標軸下的定子電壓和電流,經(jīng)過擴展卡爾曼算法估算(S 函數(shù)形式),最終在最右端的綜合示波器表示電機真實波形與卡爾曼估計的波形作對比。
擴展卡爾曼濾波器的參數(shù)如下:
1)初始狀態(tài)向量
2)狀態(tài)轉(zhuǎn)移矩陣
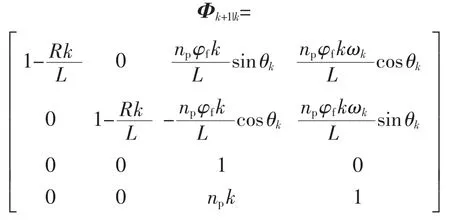
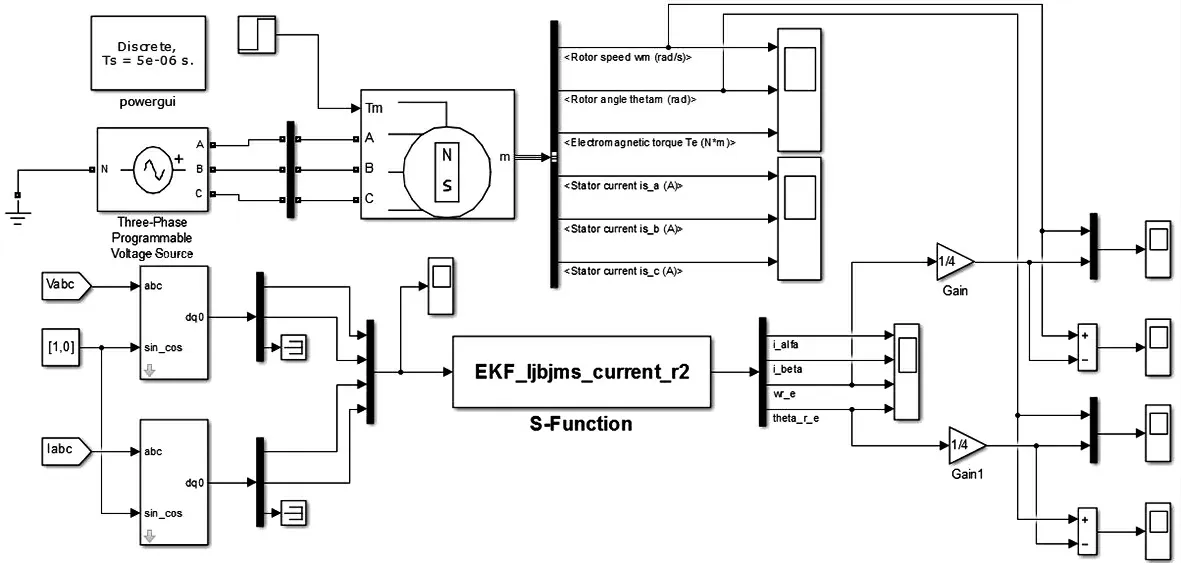
圖2 擴展卡爾曼濾波仿真模型Fig.2 Extended Kalman filter simulation model
3)觀測矩陣
4)初始協(xié)方差矩陣
5)方差
基于表1所給電機參數(shù),對算法進行仿真驗證。結(jié)果顯示,電機的電角速度為314 rad/s,由于仿真所采用的永磁同步電機的極對數(shù)為4,因此電機的機械轉(zhuǎn)速為78.5 rad/s。
電機轉(zhuǎn)速對比的仿真結(jié)果如圖3所示。由圖可見,當轉(zhuǎn)速上升時擴展卡爾曼濾波估計值稍有延時,短暫時間后,估計轉(zhuǎn)速與真實轉(zhuǎn)速幾乎重合,由此可見擴展卡爾曼濾波算法可以很好地估算電機的轉(zhuǎn)速。當噪聲較小時,估計值能迅速地跟蹤真實值,從而盡早給出可靠的轉(zhuǎn)速數(shù)據(jù)值。電機轉(zhuǎn)速誤差如圖4所示。由圖可見,轉(zhuǎn)速的誤差在0.1 s 時基本無誤差,估計值幾乎等于真實值。

圖3 電機轉(zhuǎn)速對比Fig.3 Comparison of motor speed
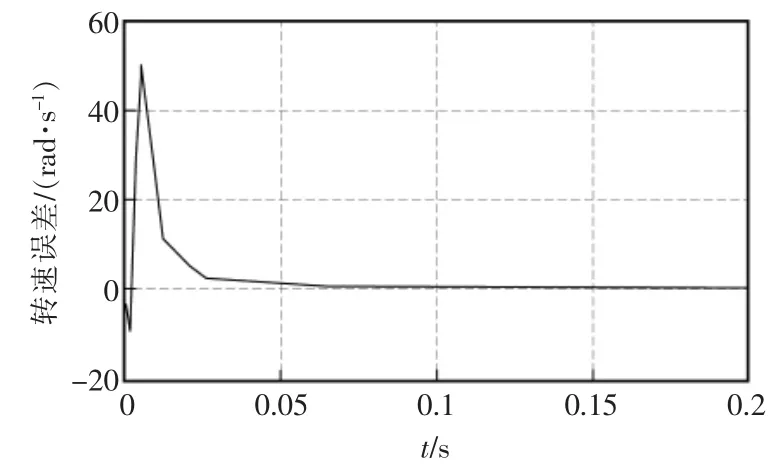
圖4 電機轉(zhuǎn)速誤差Fig.4 Motor speed error
基于此可以看出,采用卡爾曼濾波算法可以對電機的轉(zhuǎn)速進行很好的預估,從而省去了速度傳感器的安裝,簡化了電機結(jié)構(gòu)。
此外,設(shè)定電機在0.1 s 時突然提高轉(zhuǎn)速,并在0.25 s 時降至原值。以此測試當電機轉(zhuǎn)速有所變化時,擴展卡爾曼濾波算法是否可以精確地估算出電機參數(shù)。轉(zhuǎn)速突變估計及電機轉(zhuǎn)速誤差的仿真結(jié)果如圖5和圖6所示。
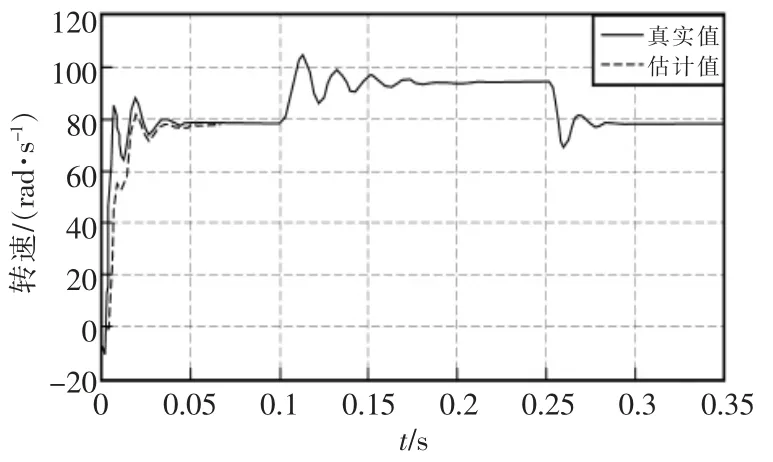
圖5 轉(zhuǎn)速突變估計Fig.5 Speed mutation estimation
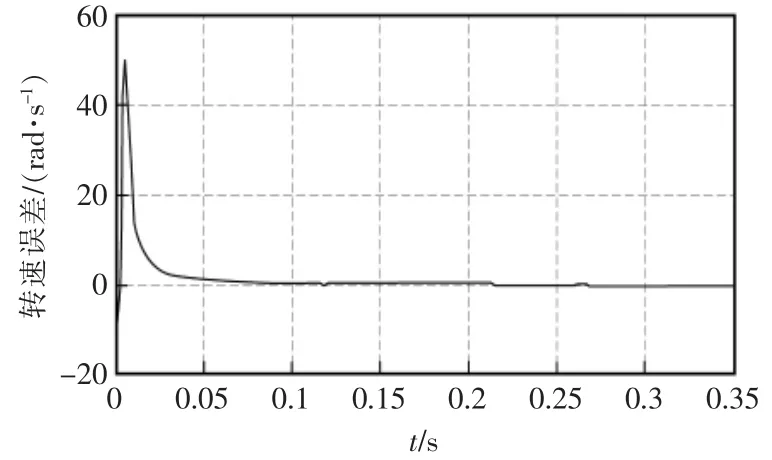
圖6 電機轉(zhuǎn)速誤差Fig.6 Motor speed error
由圖可見,即使電機在途中調(diào)速,而且估計誤差波動的范圍很小,該濾波器依然可以精確地估算出轉(zhuǎn)速。由此驗證了在系統(tǒng)多變的情況下濾波器精準且高效的估算能力。
4 結(jié)語
在該濾波算法的設(shè)計中,永磁同步電機是一個復雜的非線性系統(tǒng)。針對這類系統(tǒng),將卡爾曼濾波算法進行擴展,使其可以解決與非線性系統(tǒng)的相關(guān)問題。該算法不但估計精確而且運算簡便。擴展卡爾曼濾波著實為最優(yōu)估計濾波,對于永磁同步電機系統(tǒng),依舊可以很好地估算出電機轉(zhuǎn)速。因此,采用無速度傳感器,可以取代傳統(tǒng)機械傳感器,簡化數(shù)據(jù)的測量過程。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39