柔性基、柔性關節空間機械臂的運動混合控制
2019-07-11 11:32:12陳志勇張婷婷
中國機械工程 2019年12期
陳志勇 張婷婷
福州大學機械工程及自動化學院,福州,350116
0 引言
空間機械臂適于執行空間平臺搭建、捕獲大型目標物體等任務,其研究一直是人們關注的焦點[1-4]。因制造、技術等客觀原因,現實中的空間機械臂各主要部件均具有一定的柔性,這些柔性不可避免地對系統的操作運動產生負面影響,如降低系統控制精度,影響系統穩定性。近年來,為提高空間機械臂的實時操控精度,人們除對空間機械臂的臂桿柔性問題進行研究外[5-7],還研究以往極易被忽視的關節柔性、基座柔性。如文獻[8]提出一種柔性關節空間機械臂末端跟蹤的反饋線性化控制策略;文獻[9]研究了本體無控參數確定柔性關節空間機械臂在關節及工作空間下的控制問題;文獻[10]討論了外部擾動及參數不確定影響下,柔性關節空間機械臂的動力學建模與雙時間尺度魯棒控制問題;文獻[11]探討了一種自由漂浮柔性基機器人的零空間反應控制問題;文獻[12]設計了一種柔性基空間機械臂自主目標捕獲的速度分解控制算法。上述研究僅限于解決關節或基座主導柔性影響的空間機械臂主動控制問題。顯而易見,若同時考慮基座和關節的柔性,則空間機械臂的動力學模型將變得更為復雜,控制難度更大[13-14]。現有探討各類不確定性影響下柔性基、柔性關節空間機械臂末端運動控制問題的研究還尚不多見,且亟待更進一步地積累與完善。
本文旨在解決參數不確定、外部擾動并存的柔性基、柔性關節空間機械臂基座姿態與末端負載的軌跡追蹤控制、基座與關節柔性振動的主動抑制問題。首先,依據奇異攝動分解技術及系統運動學關系,將系統動力學模型降階為一個表征系統剛性運動的增廣慣性空間慢變子系統、一個表征系統雙柔性振動的快變子系統。其次,為消除系統不確定性的影響,針對增廣慣性空間慢變子系統,提出一種基座姿態與末端負載協調運動,且基于等效控制、魯棒控制、參數自適應調整算法的自適應魯棒終端滑模控制律。為抑制柔性基及柔性關節在運動過程中的柔性振動,針對快變子系統設計了一種基于自適應觀測的最優控制策略。仿真結果驗證了所提方案在消除系統不確定性影響,抑制基座與關節柔性振動,實現系統預期軌跡跟蹤控制上的有效性。
1 動力學模型的描述及分解
以圖1所示柔性基、柔性關節平面兩桿空間機械臂為例進行研究。據文獻[14]并綜合考慮系統存在外部擾動的情況,建立修正后的系統操作臂動力學子方程:

(1)
及相應的驅動電機動力學子方程:
Jmθm+kmσ=τm
(2)


圖1 柔性基、柔性關節空間機械臂的系統模型Fig.1 System model of flexible-base and flexible-joint space manipulator

(3)

利用式(3)并結合基于等效剛度及奇異攝動技術,設計得到關節電機控制律[14]:
(4)

對動力學模型(式(1)、式(2))進行雙時標分解,可導出增廣慣性空間描述下的慢變子系統:
(5)
Im=diag(0,(kc+I2×2)-1Jm)

dXk/dtk=AkXk+Bkτk
(6)

2 自適應魯棒終端滑模混合自適應最優控制
為實現柔性基、柔性關節空間機械臂基座姿態的調整及末端運動的精確協調運動控制目標,基于奇異攝動模型(式(5)、式(6))設計得到的系統總控制器(慢變子控制器、快變子控制器組合而成)應同時滿足如下要求:①慢變子控制器應能克服系統不確定性的影響,使基座姿態及末端運動的實時跟蹤誤差有效、穩定地收斂至0或一個接近于0的小鄰域之內,以保證系統剛性運動具有預期的控制精度;②快變子控制器對基座、關節的振動具有良好的抑制作用。

(7)
式中,ρ(t)為新定義的系統廣義不確定性函數。
為便于控制器的分析、設計,現對上述系統作如下兩個假設[15]:

(8)
假設2不確定函數ρ(t)與系統的控制輸入相關,且ρ(t)的范數滿足
(9)
式中,bi為系統的不確定上界值,bi>0(i=0,1,2)。
e1=Y-Yd
(10)
(11)
將式(11)代入式(7),得慢變子系統誤差方程:
(12)
定義終端滑模函數
(13)
C=diag(c1,c2,c3)
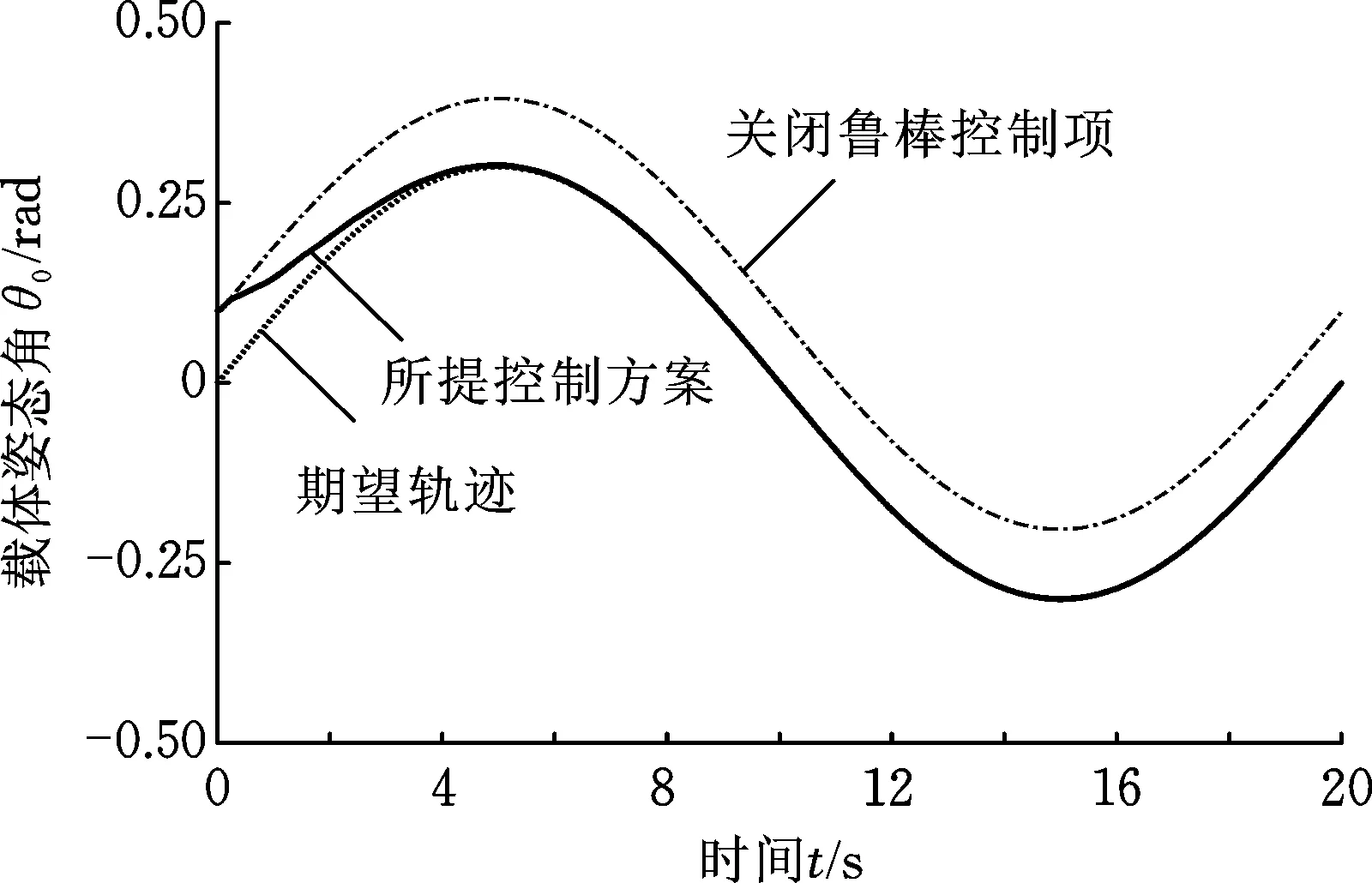
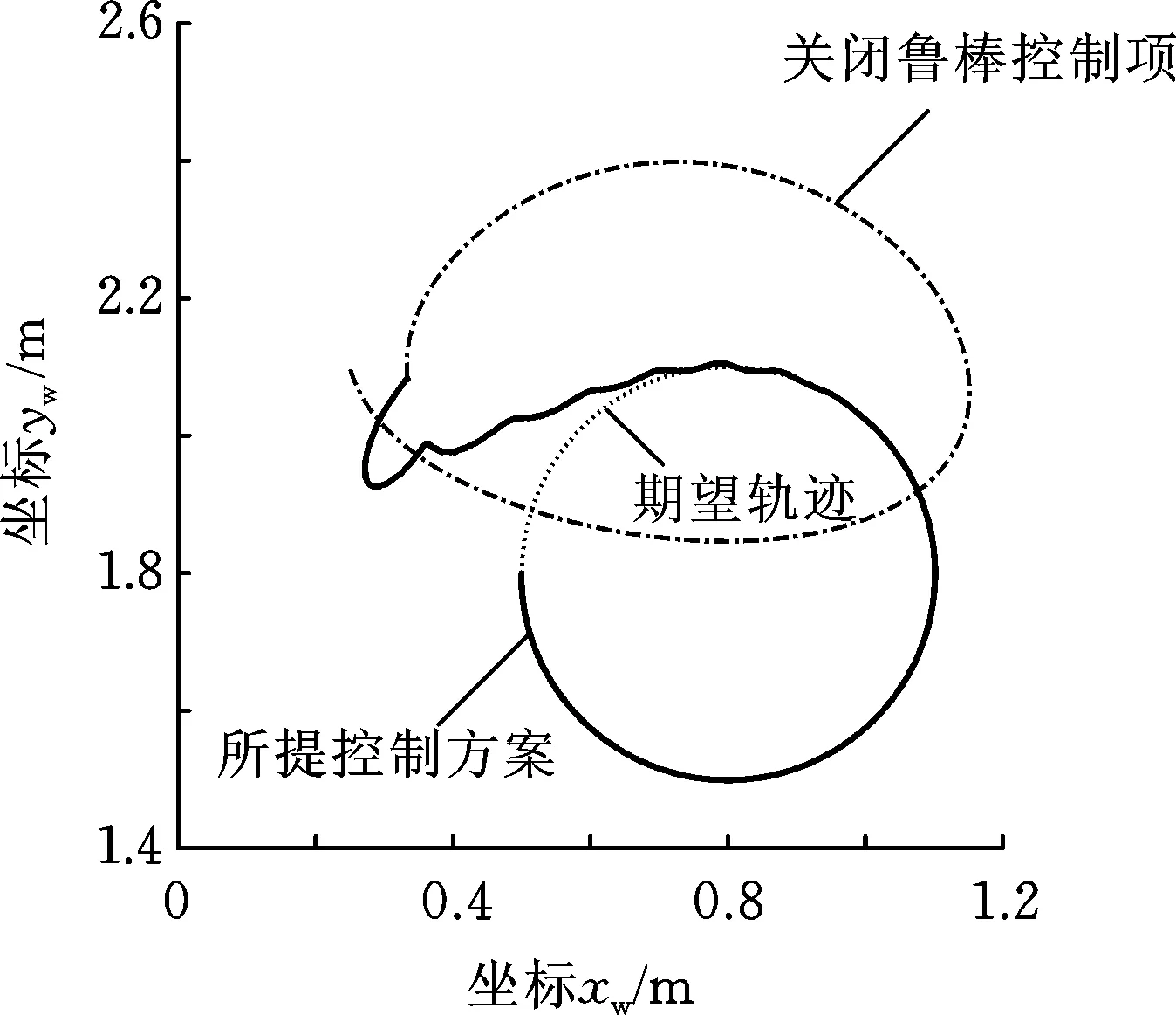
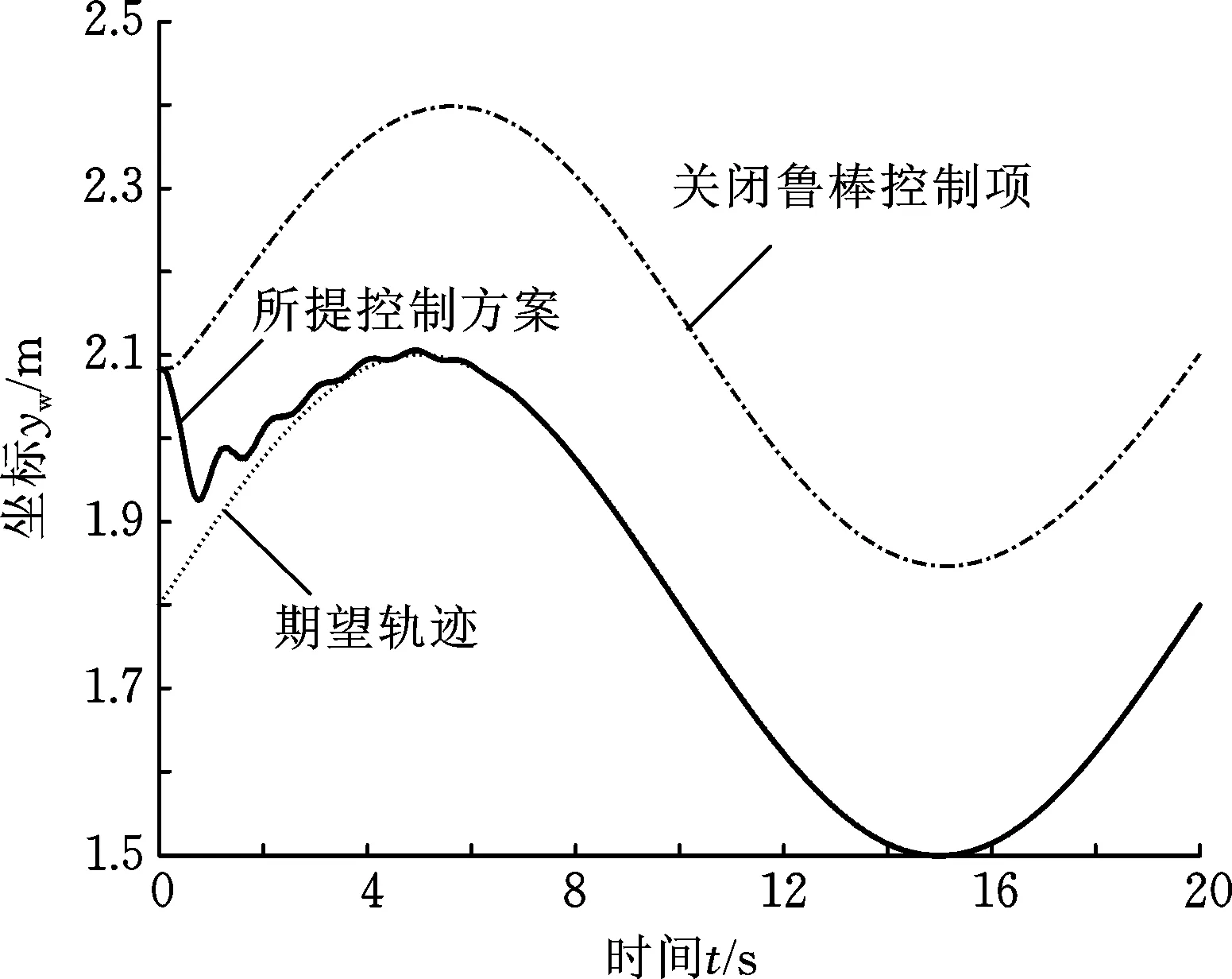
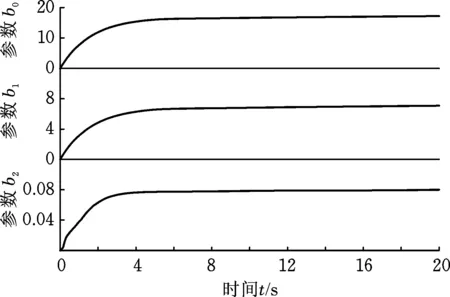
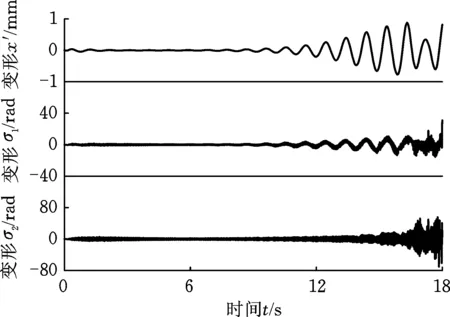
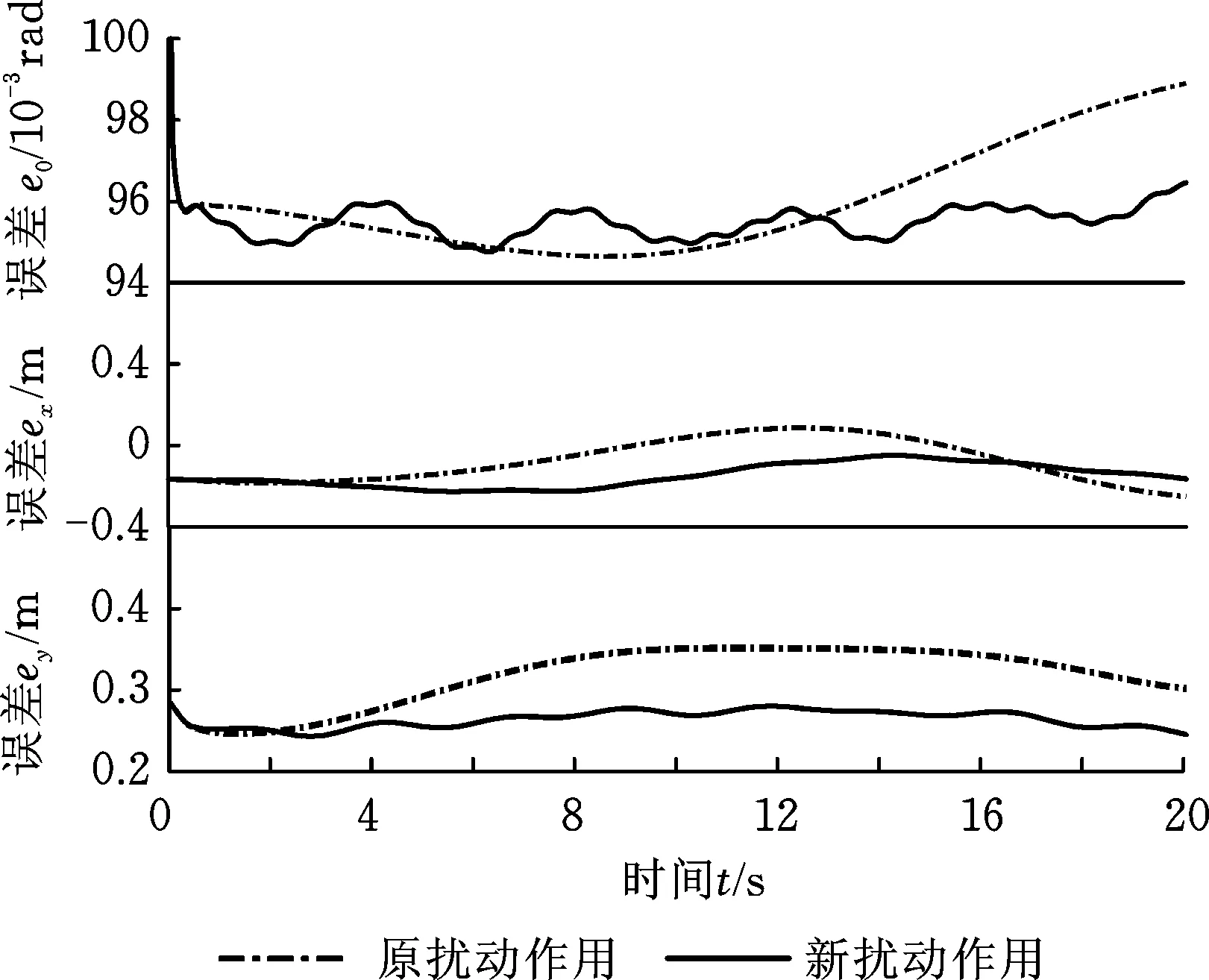
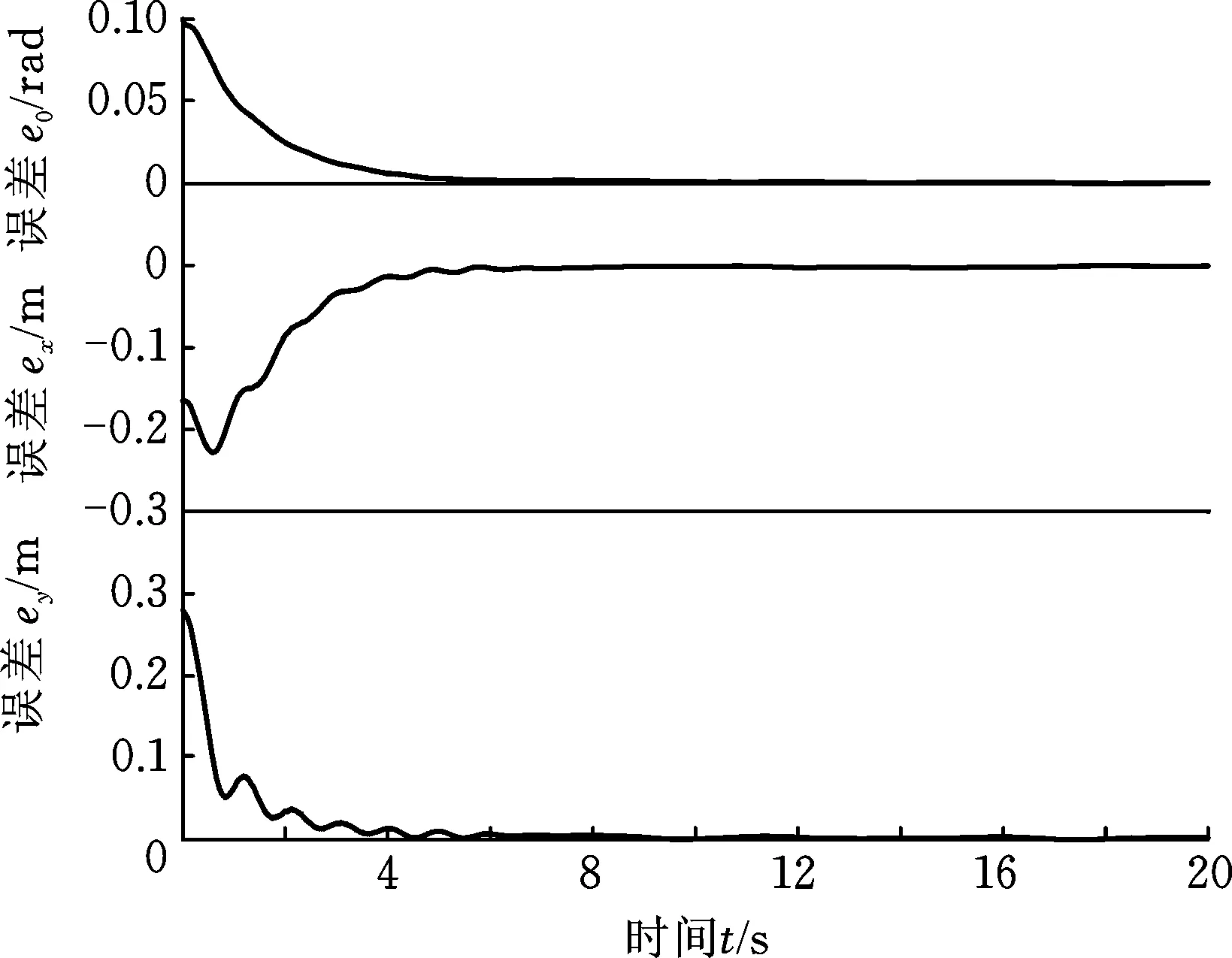
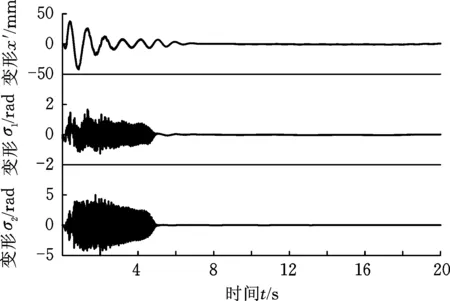
式中,c1、c2、c3為正常數;a、b均為正奇數,a 根據滑模控制理論,為保證控制系統的穩定性,所提控制律需滿足滑模到達條件: (14) (15) 若將系統不確定性影響納入考慮范疇,則需在式(15)的基礎上附加設計離散魯棒控制律: (16) 定理1 對于慢變子系統誤差方程(式(12)),由低頻等效控制律(式(15))、離散魯棒控制律(式(16))線性疊加得到的慢變控制律 (17) 可確保慢變子系統跟蹤誤差漸近穩定地收斂至零。 證明:對李亞普諾夫函數 V1=STS/2 (18) 求導,并考慮式(12)、式(13),有 (19) 將式(15)~式(17)代入式(19),并結合式(9),有 (20) 上述控制律雖能保證系統軌跡的漸近跟蹤,但仍存有改進之處:①式(16)給出的魯棒控制律在系統跟蹤誤差趨近零點時會出現離散、高頻的控制切換,此種不連續的控制極易激發系統基座、關節的柔性振動,反過來影響整個系統的剛性運動控制精度;②式(9)中的bi預估過小,慢變子系統的穩定性難以保證;預估過大,系統控制偏于保守。 為此,下面擬結合邊界層法對離散魯棒控制律(式(16))做如下連續化處理: (21) 式中,δ為小常數,δ>0。 (22) (23) (24) 式中,χi為自適應調節系數,χi>0。 定理2針對慢變子系統誤差方程(式(12)),由等效控制律(式(15))、連續魯棒控制律(式(21))、自適應調節律(式(22)~式(24))組成的慢變控制律(式(17)),可使慢變子系統跟蹤誤差收斂到零附近的小鄰域內且最終一致有界。 證明:對李亞普諾夫函數 (25) 求導并結合式(19),可得 (26) (27) 結合式(22)~式(24)、式(9),式(27)可進一步簡化為 (28) 為抑制系統基座、關節在運動過程中產生的柔性振動,采用基于系統能量性能指標函數的自適應最優控制器對快變子系統(式(6))進行主動控制。 (29) (30) 若Z1可測,則可利用自適應觀測算法: (31) (32) 對高階狀態Z2進行在線觀測[17]。 對式(31)求時間的一階導數,并利用式(32),整理得 (33) 顯然,為使上述觀測系統保持穩定,需合理選取Λ以確保式(33)具有負實部的特征值。 (34) 為證實上述理論分析、結果的可行性,擬對圖1所示柔性基、柔性關節空間機械臂進行系統仿真控制研究。假設mj、Jj(j=0,1,2,w)表示空間機械臂各分體(下標0對應載體基座,1對應臂桿1,2對應臂桿2,w對應負載)的質量及轉動慣量;l0表示x0軸上點px0與px1的距離(載體基座的寬度),l1、l2分別為臂桿1和臂桿2的長度。系統真實參數如下:m0=60 kg,m1=m2=6 kg,mw=3 kg,J0=30 kg·m2,J1=J2=3 kg·m2,Jw=1.5 kg·m2,l0=l1=l2=2 m,J1m=J2m=0.09 kg·m2,k1m=k2m=50 N·m/rad,k0=500 N/m。系統的初始構形為q(0)=[0.1 1.4 3.9]Trad,θm(0)=[1.4 3.9]Trad,x′(0)=0。系統的期望協調運動任務如下: 基座姿態軌跡 θ0d=0.3sin(πt/10) (rad) 負載圓周軌跡 將式(15)、式(21)~式(24)得到的慢變控制律式((17))與基于觀測器(式(31)、式(32))得到的快變控制律(式(34))進行線性疊加,可獲得系統的混合控制方案。 圖2 載體姿態的軌跡跟蹤Fig.2 Trajectory tracking ofbase attitude 圖3 負載的軌跡跟蹤Fig.3 Trajectory tracking of load 圖4 xw坐標的軌跡跟蹤Fig.4 Trajectory tracking of coordinate xw 圖5 yw坐標的軌跡跟蹤Fig.5 Trajectory tracking of coordinate yw 圖6 系統的柔性振動(所提控制方案)Fig.6 Flexible vibration of the system (the proposed control scheme) 為體現所提方案的控制優勢,本文又給出了另外4種不同控制情形下的系統仿真控制結果。 (1)僅關閉方案中的快變最優控制律τk。 圖7 參數的調整曲線(所提控制方案)Fig.7 Adjusting curves of parameter (the proposed control scheme) 圖8所示為仿真得到的系統基座及兩關節在前0.6 s內的柔性振動曲線。顯然,若不使用快變控制律τk對系統進行振動的主動控制,基座及關節將在極短的時間內產生大幅度的振動,進而導致系統無法在預期仿真時間內保持穩定并最終發散。 圖8 基座及兩關節的柔性振動(情形1)Fig.8 Flexible vibration of the base and two joints (case 1) 圖9 軌跡跟蹤誤差(情形2)Fig.9 Trajectory tracking errors (case 2) 圖10 系統的柔性振動(情形2)Fig.10 Flexible vibration of the system (case 2) 圖11 軌跡跟蹤誤差(情形3)Fig.11 Trajectory tracking errors (case 3) 圖12 不同擾動作用下的跟蹤誤差(關閉魯棒控制項Fig.12 Trajectory tracking errors from different disturbances (without the robust control item 圖13 軌跡跟蹤誤差(情形4)Fig.13 Trajectory tracking errors (case 4) 圖14 系統的柔性振動(情形4)Fig.14 Flexible vibration of the system (case 4) 本文為解決具有不確定參數和外部擾動的柔性基、柔性關節空間機械臂的控制問題,提出一種由自適應魯棒終端滑模控制與自適應最優控制相結合的基座姿態、末端負載協調運動混合控制策略。自適應魯棒終端滑模控制通過對系統不確定函數集中項上界值的自適應估計及控制信號的連續化處理,消除了系統不確定性、控制信號離散對系統剛性運動帶來的負面影響,實現了系統期望軌跡的精確跟蹤。自適應最優反饋控制可避免對系統高階快變量進行實時測量,不但保證了快變子系統的穩定性,而且能有效抑制系統基座、關節的柔性振動。理論分析及仿真結果均證實了所提方案的有效性及魯棒性。









3 仿真結果








4 結論
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
當代工人(2020年8期)2020-05-25 09:07:38
數學物理學報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09