
風電機組機艙環境智能控制系統研究
2019-07-22 01:39:34劉夢婷許傲然于杰承
山東工業技術 2019年19期
劉夢婷 許傲然 于杰承
摘 要:本文針對風機機艙發熱問題,研發一個高效多元化、能同時滿足監控、處理風電問題的機組機艙環境智能控制系統。根據機艙內部環境控制系統功能需求,通過對專家自適應PID參數整定,從而對步進電機進行運行控制,實現了對機艙內部進行送風動作與智能過濾系統過濾網的自動更替給進,對解決目前風機機艙環境現存問題具有參考價值。
關鍵詞:風機;控制系統;參數整定
DOI:10.16640/j.cnki.37-1222/t.2019.19.151
0 引言
由于大部分風電場所處環境惡劣,導致風機機艙、齒輪箱散熱片受到污染,導致風力發電機齒輪箱油溫過高,風機限功率運行甚至停機。由于維護的實效和故障的延遲判斷等因素,增加了風電機組的不可利用小時數,給風場造成經濟損失[1-2]。目前國內外主要針對機艙環境問題均沒有高效和從根本上解決機艙內污染,齒輪箱熱交換器堵塞問題。
本文提出的控制系統能夠有效提高機艙的清潔度,計劃同時解決齒輪箱散熱器由于污染造成的溫度過高,導致風機故障停機的問題,提高風電場的經濟效益。
1 風機機艙發熱原因分析
風機機艙具有很好的密封性[3],機艙內部無法及時地與外界進行熱交換,導致UPS電源溫度過高。工作人員為保護UPS電源,將其用密閉金屬外罩進行防護,導致機艙內的溫度進一步升高,但拆除UPS金屬外罩會使UPS的工作可靠性降低。而且,安裝于機艙頂部功率改變頻率儀器柜運行中也會產生大量熱量,這些熱量也無法及時排出,這是造成機艙發熱的另一個重要原因。除此之外,發電機軸承和齒輪箱油溫溫度過高也會導致機艙發熱。大多數機艙采用的都是自動的潤滑裝置,裝置發生故障時造成軸承潤滑不充分發熱,情況嚴重時機組報警甚至停機。且由于控制流量流通路徑的溫控換向閥故障,散熱片出現漏油或者滲油,散熱片設計不合理等原因會導致齒輪箱油溫溫度過高,最終造成風機機艙過熱。
2 系統控制算法設計與整定
2.1 專家自適應PID算法
這種算法主要是以被控對象以及相應的控制規律作為基礎,然后再通過專家系統把所有的知識應用進來,最終形成一個更加優化和實用化的控制系統。
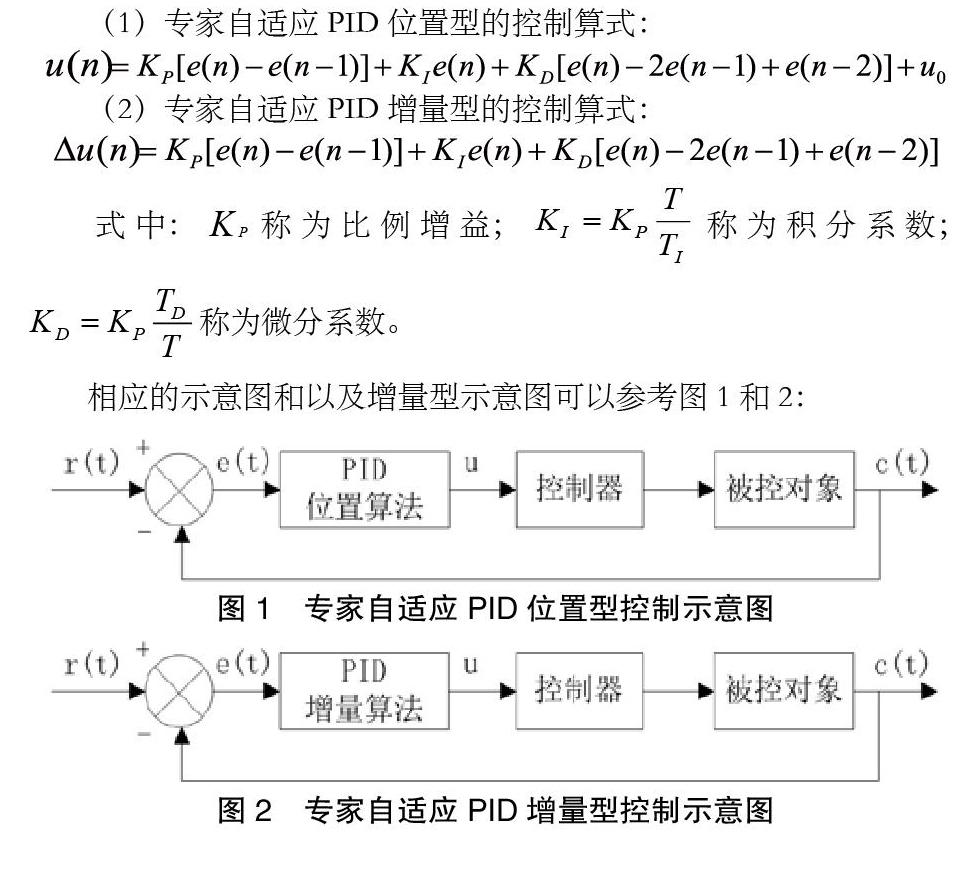
(1)專家自適應PID位置型的控制算式:
(2)專家自適應PID增量型的控制算式:
式中:稱為比例增益;稱為積分系數;稱為微分系數。
相應的示意圖和以及增量型示意圖可以參考圖1和2:
2.2 PID參數整定方法
首先要讓調節器參數的積分系數=0,然后再從小到大不斷改變比例系數的值,改變的過程中其擾動信號也會呈現出一種階躍的變化,觀察能夠獲得達到要求的控制過程為止。取比例系數作為當前的值,并且讓該值乘以0.83,然后再從小到大不斷的改變積分系數的值,在改變的過程中其擾動信號也會呈現出相應的階躍變化。讓保持不變,然后對比例系數進行調整,對整個控制過程進行詳細觀察,并關注其是否已經改善。將恰當的實際微分系數以及引入到系統當中,這個時候也可以適當的增大和。然后不斷調整并觀察整個控制過程,一直到能夠獲得滿意的控制過程為止。
3 步進電機的整定動作
在所設計的溫度控制系統當中,都需要在程序中設定相應的參數,比如說機艙和塔架內部所具有的溫度,在設置機艙環境智能控制系統的時候,在其中需要用到相應的模擬量輸入,該輸入還需要與A/D轉換值進行相應的轉換。通常用函數關系A=f(D)來進行表示:
根據該方程,可以依據D的值計算出A值。將該方程是一種典型的逆變換,由此可以得到D=f(A),用它來可以相應的數學方程:
當整個控制系統被啟動的時候,機艙所具有的內部溫度模擬量則需要通過EM231輸入模塊來首先讀入到系統當中,而對于這個模塊當小于40℃時輸出4mA,過濾系統步進電機不動作,即不進行過濾網更替轉動動作;當大于45℃時輸出20mA,過濾系統步進電機進行動作。
4 結語
本文擬采用專家自適應PID控制算法并整定,與機艙智能控制系統控制原理進行結合,從而對步進電機進行運行控制,實現了對機艙內部進行送風動作與智能過濾系統過濾網的自動更替給進,以提高風電機組的發電效率,為解決目前風機機艙環境現存問題做出了貢獻。
參考文獻:
[1]劉佰瓊,徐敏,劉晴.我國海上風電發展的主要問題及對策建議[J].海洋開發與管理,2015,32(03):7-12.
[2]李岳峰,趙志剛.基于振動信號分析的風機傳動系統故障診斷案例研究[J].沈陽工程學院學報(自然科學版),2017,13(04):296-301.
[3]方韜.英國海上風電發展模式及借鑒意義[J].中國能源,2014,36(12):26-30.
