基于虛擬現實的裝甲車輛運動仿真研究①
2019-07-23 02:08:46郭立威高克斌
計算機系統應用 2019年6期
關鍵詞:模型
郭立威,王 權,高克斌,顧 聞
(陸軍炮兵防空兵學院 士官學校,沈陽 110000)
隨著科學技術的發展,虛擬現實(Virtual Reality,簡稱VR)技術已經滲透進了軍事生活的各個方面.VR 技術因具有良好的可控性、安全性、費用低、不受氣候影響、不受空間場地的限制等特點,已被廣泛應用到虛擬戰場環境、軍事訓練等領域[1].如今將虛擬仿真技術應用在軍隊建設實用化方面受到越來越多的重視.中國軍隊同樣也無法避免軍事虛擬仿真訓練的國際化浪潮.各國都面臨國防預算削減、病理削減、同時要更加努力保持其有效性的要求.中國軍隊在國際地位的崛起.也面臨著進入許多陌生國際地區進行軍事防衛的任務.這就迫切要求軍事人員能夠在他們可能不熟或難以進入的國家和氣候條件下進行作戰,因此用虛擬仿真模擬的訓練演練架構支持將是十分重要的.現代戰場作戰方式的改變和科學技術的高速發展促使武器裝備更新迭代周期加快,隨之增加的還有裝備訓練和演練的各種經費,例如場地、裝備、訓練等費用.新形式下,針對創新裝甲車輛等裝備的訓練方法,大幅度降低日常訓練成本、提高訓練效率、增加訓練靈活性和擴展性、提高訓練安全性成為發展裝備訓練技術的需求驅動.隨著虛擬現實技術的高速發展,采用智能傳感器、三維建模、三維地理信息、粒子效果、沉浸式顯示等技術手段能夠逼真的建立虛擬的戰場環境,采用物理仿真可以仿真車輛的動力學特性,從視覺場景和交互操作上完全模擬實裝.正是因為虛擬現實技術可以高度逼真的模擬人在自然環境中的視覺、聽覺等行為,真實的模擬環境多變的特點,使得采用虛擬現實技術和物理仿真技術代替實裝訓練成為了一個非常重要的研究方向[2-4].裝甲車輛的運動仿真目前已經有了許多的研究,在文獻[5]的研究中只是做了一個可視化的交互式的裝甲車輛仿真系統,文獻[6]的研究中,并未考慮不同地形對裝甲車運動性能的影響.在文獻[7]中,研究重點是裝甲車在任意地形上的運動,只是分析了裝甲車的受力,并未對裝甲車自身姿態做進一步的研究.文獻[8]則將重點放在了場景和裝甲車的建模上面.以上研究皆未對裝甲車在運動過程中自身姿態的問題做出更進一步的研究,本文將針對在不同地形上,裝甲車自身姿態調整的相關問題進行研究.
1 裝甲車輛駕駛仿真模型
建立了裝甲車輛駕駛的仿真模型,如圖1所示.
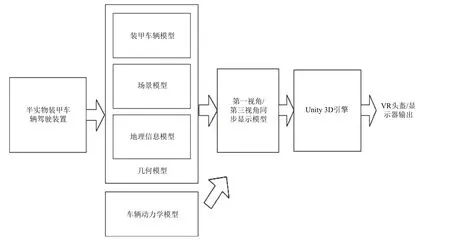
圖1 裝甲車輛駕駛仿真模型
模型分為半實物裝甲車輛駕駛裝置、幾何模型、車輛動力學模型、第一視角/第三視角同步顯示模型、Unity3D 引擎和顯示六部分.半實物裝甲車輛駕駛裝置提供操作的輸入信號,包括操縱桿、油門、剎車和離合器等裝置,將輸入信號作為幾何建模的輸入數據,為幾何建模提供數據上的支持.幾何模型包括車輛的實體模型、駕駛的場景模型(如城市、草原、山區等)、地理信息模型(包括高程數據和遙感影像).車輛動力學模型用來計算車體的姿態.在模型創建完成之后,為使用者提供不同的視角.第一視角/第三視角同步顯示模型實現仿真過程中,駕駛位第一視角和第三視角的同步顯示.通過Unity3D 引擎將駕駛場景部署到VR 沉浸式頭盔.以VR 沉浸式頭盔作為第一視角顯示載體,投影屏幕可作為第三視角顯示載體.
1.1 裝甲車輛實體模型構建
在對當前最流行的幾種建模工具軟件進行詳細對比后,結合裝甲車的特征和不同軟件的優勢特點,使用了建模能力較強的3DMAX 工具軟件對裝甲車進行初步的幾何建模.裝甲車模型是由相對規則的組件構成的,使用網格建模法,采用一系列的陣列、放樣、鏡像、網格編輯、紋理材質等方法作為幾何建模的輔助手段對模型進行外觀上的優化,最后將輸出的數據導入到MultiGen Creator 當中對模型進行詳細的處理,得到最終的裝甲車側模型.輸出的數據是由半實物裝甲車輛駕駛裝置提供的包括操縱桿、油門、剎車和離合器等裝置的真實數據,保證了模型的仿真[9-11].
圖2是對裝甲車實體模型的構建,其中最重要的部分是對于履帶模型的構建,履帶與一般的車輪不一樣,一般的車輪可以抽象成圓繞圓心旋轉,而履帶卻抽象成橢圓.

圖2 裝甲車實體模型
履帶實體建模如3 圖所示.履帶式裝甲車在行進過程中自身重力有部分是由負重輪來承擔,并通過履帶將自身重力作用于地面.前行運動通過模擬真實的發動機引擎,轉向運動是通過調整左右履帶的速度來實現的.裝甲車輛模型可由模擬駕駛艙來操控,也可以使用手柄操控.

圖3 履帶模型圖
1.2 裝甲車輛運動過程動力學建模
對裝甲車輛運動過程進行動力學建模,主要分析其受力,運動形態[12].
1.2.1 受力分析
裝甲車輛在與地平面成α 角的斜坡上行駛,受到的主要力有自身重力、空氣阻力、地面阻力以及引擎的牽引力.
1)重力
重力是由裝甲車自身重量決定的,假設裝甲車輛是左右對稱的,其重心在其縱對稱面上.
2)空氣阻力Rk
計算公式可表示為:

其中:A表示坦克的正投影面積,假設在理想環境中,裝甲車在前行過程中只會受到迎面而來的風.C是空氣阻力系數.v是裝甲車行駛的速度.A表示的就是受到風吹的面積,其計算公式表示為:

W是履帶的中心距,H是高度,m是修正系數,v是裝甲車行駛速度.
3)地面阻力
由于裝甲車體積大,重量大,履帶與地面接觸面積大的原因,裝甲車在經過時,地面會下陷從而對裝甲車有一個向上的反作用力,在離開某段地面時,又會給裝甲車一個前行的牽引力,再加上地面的摩擦力.再加上路況的原因,裝甲車可能會發生打滑的現象.這些原因使得地面阻力的分析變得十分復雜.根據以上分析,考慮到實際需求,對地面阻力進行了以下簡化:①地面不會因裝甲車的重量而下陷.②裝甲車在前行過程中的地面附著力要大于牽引力,不會出現打滑的現象.③裝甲車在轉彎的時候不會產生側滑.簡化后的地面阻力公式可表示為:

其中,μγ是裝甲車行駛過程中地面變形阻力的系數,Q是裝假車對地面的附著重力.
4)牽引力
牽引力分為裝甲車引擎的動力和經過某段路后,土壤給裝甲車的牽引力.在這里要求不是很高,土壤給裝甲車的牽引力可以忽略不計.只考慮裝甲車引擎的牽引力就足夠了.裝甲車牽引力F的計算公式可表示為:

其中,Mf表示發動機扭矩,rz表示主動輪半徑,i表示某檔的總傳動比,η表示裝甲車的效率.
1.2.2 運動形態分析
裝甲車的運動形態主要分為直線行駛狀態和轉彎狀態.為了保證裝甲車在行駛過程中不會出現嵌入地里和懸空的情況,還要及時對裝甲車的姿態進行調整.裝甲車的行駛有六個自由度,前后、左右和上下三個移動自由度,翻滾、偏航和俯仰三個旋轉自由度.通過移動自由度確定裝甲車的位置,通過旋轉自由度來調整裝甲車的姿態.
1)直線行駛狀態
以有一定坡度的上坡路為例,裝甲車在上坡路上直線行駛的過程中速度為v,假設當前所處的位置為CurPos(x,y,z),目標位置是AimPos(x’,y’,z’),移動方向為Dir(xd,yd,zd),垂直偏轉角度(移動方向與水平面的夾角)為Rotv,水平偏轉角度Roth,移動方向在水平面上的投影為:Dir(xh,zh),如圖4.
圖4 直線行駛狀態圖
由圖4可以得出:
垂直偏轉角度

水平偏轉角度

目標位置的坐標為:
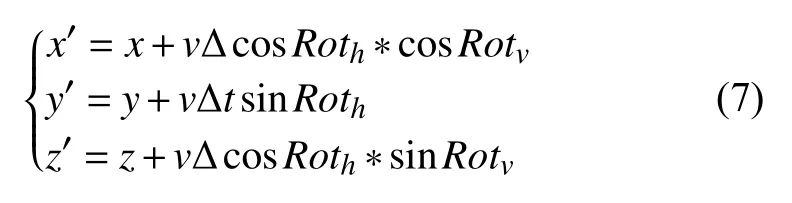
其中Δt是時間的變化量.
裝甲車姿態的調整
在簡單的上坡、下坡行駛中,需要調整俯仰自由度.如果不調整,裝甲車在上坡的過程中會出現嵌入地面的情況,下坡的時候會出現懸空的情況.
如圖5取裝甲車兩邊履帶所在的平面與水平面的夾角為俯仰角,實時調整俯仰角保證兩邊履帶所在平面與接觸地面的法向量垂直.通過這種方法調整裝甲車的姿態.(利用裝甲車行駛的方向向量所在的垂直于水平面的面將地形切出一個平面).
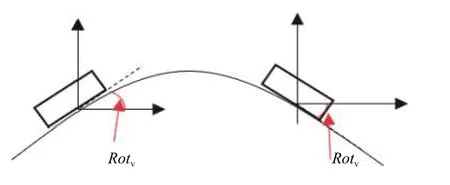
圖5 裝甲車俯仰角
如圖6所示,將裝甲車的運動投影到XOY 平面上,則裝甲車在某點上的俯仰角等于曲線在該點的斜率.
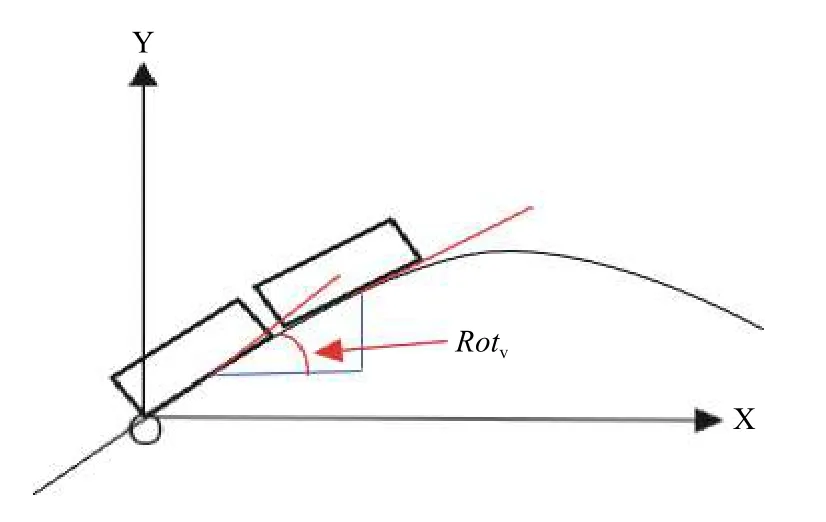
圖6 裝甲車調整俯仰角
2)轉彎行駛狀態
裝甲車因為履帶的關系使其與一般車輛的轉彎行駛有所不同.在文獻[1]中介紹了有關履帶車輛的轉向運動.當履帶車輛以速度v做半徑為R的轉向運動時,分為大半徑區和小半徑區兩種情況
① 小半徑區就是指轉彎半徑的取值范圍[0,W/2]之間,其中W是車身的寬度,也就意味著旋轉中心在裝甲車內部.此時裝甲車兩側的履帶的速度的方向是相反的,模擬這種情況可以簡化為給裝甲車一個固定的角速度,讓裝甲車繞質心所在的法向量做旋轉運動,即原地打轉.
② 大半徑區是指轉彎半徑大于W/2.此時裝甲車轉彎的形態就像一般的車輛.即使是這樣,裝甲車輛的轉向行駛狀態也是十分復雜的.假定裝甲車是在水平面上運動,但是裝甲車在高速轉彎和低速轉彎時所受到的離心力影響是不同的,轉向阻力矩也是不同的.若是把裝甲車看成是剛體,則它應該有六個自由度:橫向、縱向、垂直三個平移自由度,翻滾、俯仰、和偏航三個旋轉自由度.由于是在水平面做轉向運動,就沒有垂直方向的平移自由度和翻滾、俯仰兩個旋轉自由度.只剩橫向、縱向兩個平移自由度和偏航一個旋轉自由度.為了簡化設計的復雜性,不考慮離心力和轉向阻力矩,只考慮裝甲車以速度v 進行轉向(以左轉為例)行駛.為了方便觀察,以俯視的角度繪制示意圖.其中Center(x0,y0)是裝甲車轉彎軌跡圓的圓心,CurPos(x,z)是裝甲車的當前所處的位置,Dir(xd,zd)是當前的行駛方向,AimPos(x’,z’)是裝甲車目標位置,Dir’(xd’,zd’)是裝甲車到達目標位置時的行駛方向.
如圖7所示,可求得兩點之間的弧長(即裝甲車的運動軌跡的長度)為vΔt,兩點之間的距離(即弧對應的弦長)為可以由相關的公式求出裝甲車的轉彎半徑和對應的角度.公式為:
在水平面上的轉彎不需要進行姿態上的調整.
圖7 水平地面轉彎
3)比較復雜的情況是在坡路上轉彎
裝甲車在坡路上轉彎,會涉及到俯仰、偏航和翻滾三個自由度的變化.取裝甲車兩邊履帶所在平面的方向向量的方向為裝甲車的速度方向.假定裝甲車在上坡路上向左轉彎俯仰自由度在減小的同時,翻滾自由度在增大(右履帶要比左履帶高).兩者的改變量是相同的,所以翻滾自由度是不需要考慮的.在已知裝甲車行駛速度的前提下,討論偏航角和俯仰角之間的關系.
如圖8所示A是開始轉向時速度的方向,A’是A在地面上的投影,B是轉向后的方向,B’是B在地面上的投影.∠AOA’是開始轉向時的俯仰角∠BOB’是轉向后的俯仰角,∠A’OB’是偏航角,可以得到俯仰角和偏航角之間的關系為:

裝甲車的受力和地形是影響其自身姿態的最主要原因,自身姿態的改變體現在俯仰角、翻滾角、偏航角的變化.通過對裝甲車在不同地形上的受力分析以及裝甲車的當前狀態,利用公式計算出俯仰角、翻滾角、偏航角的變化,從而達到調整自身姿態的目的.

圖8 坡道轉彎
1.3 地形場景構建以及駕駛視角
為了盡可能的模擬真實的裝甲車的行駛環境,檢驗裝甲車輛運動姿態與虛擬地形表面的契合度,本系統選取某靶場的真實地形作為虛擬訓練場景的地形來源.采用靶場真實地形的DEM 數據作為真實地形環境生成的依據,同時從該靶場航拍影像數據中提取地形的真實紋理數據,動態鋪設虛擬環境的地形表面紋理,有效避免了遙感影像貼圖隨縮放而發生失真現象的產生.
駕駛者可以從第一視角和第三視角去觀察裝甲車的運動形態和自身姿態.
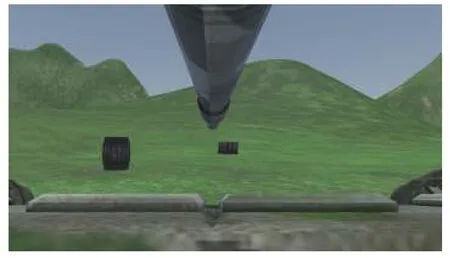
圖9 第一視角圖
使用Unity3D 引擎在裝甲車模型內部放置攝像機,方向是裝甲車的正前方,該攝像機的視野就是第一視角的視野.
使用Unity3D 引擎在距離裝甲車中心一定距離處放置攝像機,該攝像機可以在以裝甲車中心為圓心,以距離為半徑的球面上運動,方向始終朝向裝甲車,該攝像機的視野就是第三視角的視野.

圖10 第三視角圖
2 試驗與分析
利用Python 繪制如下坡道,在這個坡道上實驗計算裝甲車行駛時模型的可行性.
裝甲車在坡道上做直線行駛時,俯仰角和車輛位置之間的關系
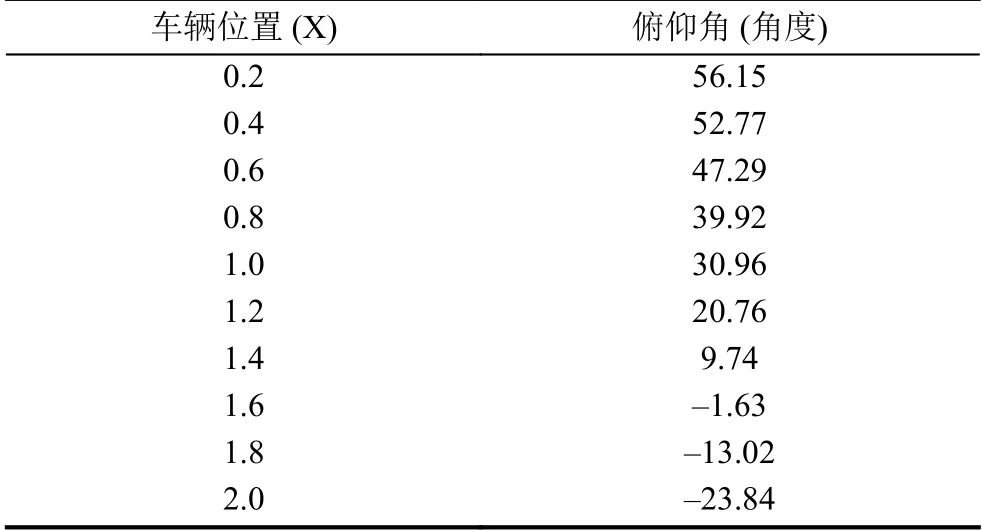
表1 坡道直行,位置與俯仰角的關系
利用圖11中的坡道作為裝甲車坡道轉彎時的模型.假定裝甲車的初始位置是0.9,裝甲車左轉行駛,其偏航角、俯仰角和翻滾角之間的關系.
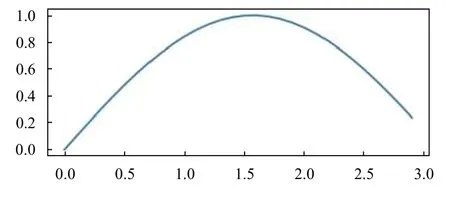
圖11 坡道模型圖
采用上述算法對裝甲車自身姿態進行調整結果如下:
在裝甲車運動的過程中,如果不能對裝甲車自身的姿態做出及時的調整,會出現裝甲車懸空或嵌入地面的情況,本文通過對裝甲車受力分析以及對裝甲車當前速度、位置等信息的分析,進而對影響裝甲車自身姿態的三個變量進行計算,達到調整裝甲車自身姿態的目的.可以看到在這三種形態下,裝甲車自身的姿態都能隨著地形的起伏變化做出相應的調整,使得裝甲車的履帶緊貼地面.
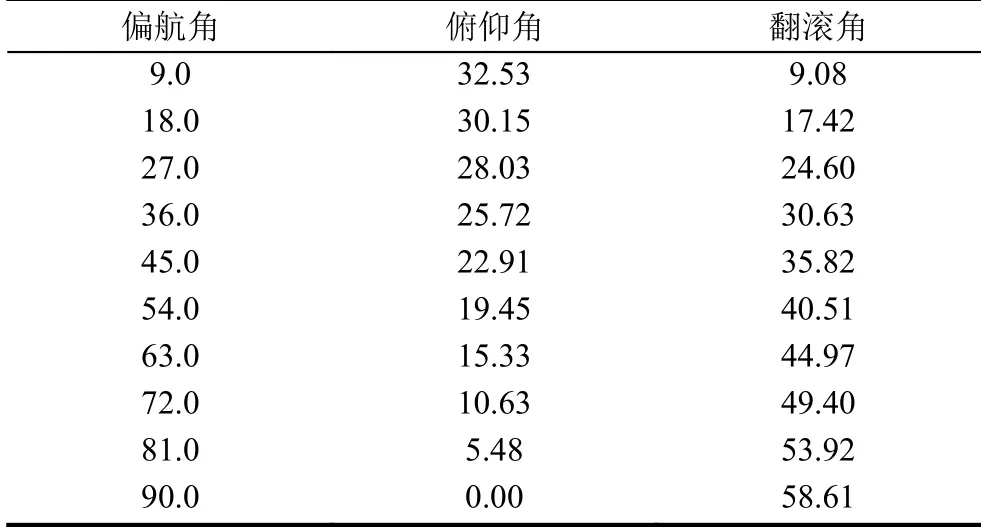
表2 坡道轉彎,偏航角、俯仰角與翻滾角之間的關系

圖12 直行上坡圖

圖13 坡道左轉圖(上坡)
3 結論
在裝甲車輛模擬駕駛仿真中,實時調整裝甲車的姿態是重要組成部分.通過分析地形特點和裝甲車運動的動力學模型本文給出了裝甲車在坡道上直線行駛和轉彎行駛的模型,通過對模型的仿真和數據的分析驗證了模型的可行性.本文對三維地形下裝甲車的運動姿態做了數據分析,后續將研究不同地形下裝甲車的運動所帶來的觸感進行深入研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19