高速動車組牽引制動仿真系統的自動控制狀態轉換圖
2019-07-29 06:01:38王皓,陸陽,高翔
鐵路計算機應用 2019年7期
關鍵詞:系統
王 皓,陸 陽,高 翔
(中國鐵道科學研究院集團有限公司 機車車輛研究所,北京 100081)
高速動車組與傳統鐵路運輸不同,其動力分散,且整列車輛在運營過程中不可拆散重組的運營特性,不同于傳統的鐵路機車車輛。借助動車組仿真平臺,可以進一步研究相關的運營特性,為不斷提高動車組運營效率提供重要參考。鐵路機車車輛及動車組的仿真平臺研究在國外已經展開。比較成熟的仿真平臺有北美的RAILSIM、歐洲的Trainstar、日本的UTRAS[1]、俄羅斯的EMUTTCS[2]。它們各有特色,結合我國的高速鐵路建設特點,以及運營經驗,需要開發符合國情需求的高速動車組仿真平臺[3]。
《列車牽引計算規程》[4](簡稱:《規程》)是針對中國鐵路運輸實際情況制定的計算標準。基于該《規程》,開發了專門針對高速動車組的牽引制動仿真系統(簡稱:動車組仿真系統),以便充分利用先進的計算機技術為我國高速動車組的運用和研究提供重要參考數據。
鐵路線路的設計和建設都有規定的限速,因此仿真系統中必須有防止動車組超過軌道限速的功能[5]。基本的仿真系統功能只要能使固定的加減速控制動車組達到區間限速并穩定運行即可[6],復雜的仿真系統,需要進一步提供方便直觀的調整控制動車組運行過程的細節[7-8],例如:加速、制動手柄的位置,定速和緊急制動(EB、UB)的控制,以及運行狀態的詳細記錄等。
簡單的自動控制可以根據動車組追蹤間隔,采用提前制動的方式進行控制[9],或者基于ATP系統的減速曲線來反算減速控制操作[10]。對于仿真的中間過程,可以將其設計為啟動牽引、惰行-牽引、惰行-制動3個情況[11]。但是,仿真過程中,存在著起車、限速、過分相、不同坡度下實現定速或加減速操作等情況,還可能需要從不同公里標啟動并運行到指定位置,來模擬應急情況、區段分析等復雜情況。這并不是一個簡單的、線性的控制狀態轉換過程。所以,我們的仿真系統中,需要一個在各種情況下,都能自動控制動車組沿著整條線路或局部線路高效運行的方法。
本文聚焦于仿真系統結構中的自動駕駛系統,提出其核心算法—控制狀態轉換圖,即通過定義動車組的若干個控制狀態,以及在這些狀態之間的轉換條件,來自動生成當前控制狀態下動車組模擬司機應該采用的動車組控制手柄的級位。而仿真系統通過讀取手柄級位(實際系統在這里不區分是真人設置的,還是自動駕駛系統設置的手柄級位),換算成牽引制動系統產生的牽引力或制動力,就可以模擬動車組在軌道上的運行狀態,完成仿真過程。
1 高速動車組仿真系統狀態轉換圖設計
1.1 狀態轉換圖設計
動車組控制手柄的級位,既可以由仿真軟件的用戶來直接指定,也可以使用自動駕駛系統來模擬司機的操作來指定。當使用自動駕駛的時候,自動駕駛系統需要知道動車組的運行狀態和控制目標,并結合模擬司機的操作特性才能決定當前的控車手柄的最佳級位。因此,根據動車組的運行情況定義了動車組的控制狀態,以及這些狀態之間的轉換條件,如圖 1所示。

圖 1 動車組控制狀態轉換圖
1.1.1 開始、停車和結束
開始、停車和結束3個狀態,對應仿真過程的入口、重要節點和出口。
開始狀態。仿真系統需要根據仿真項目的配置初始化自動駕駛的參數,例如:根據項目配置參數,確定動車組在軌道線路上初始位置、停車站位置,線路上哪些分相區間是有效的,還要確定仿真最終結束的位置。
停車狀態。一般是動車組在仿真開始的起點、軌道上的停車車站,或者是區間仿真時對應的軌道上的起點和終點的狀態。在這個狀態下,雖然車速為0,但是仿真過程并沒有結束。
結束狀態。意味著一次仿真過程結束,所有動車組運行的狀態數據記錄完畢,準備進入下一次仿真或進行數據處理。自動駕駛時,在這個狀態下,車速為0,仿真過程結束。手動駕駛的時候,結束狀態的車速可以不為0。
1.1.2 牽引和制動
牽引和制動,是動車組駕駛過程中最常見的兩種狀態。
在牽引狀態下,動車組的當前速度遠小于軌道限速和“公里標-限速”曲線規定的限速,可以按照司機牽引特性參數放心的牽引加速。當動車組當前速度很接近限速(且沒有超過限速)的時候,牽引手柄就不能全力加速,而要根據速度差,進行微調。既要實現加速到目標速度,又要防止超速。
在制動狀態下,動車組要采用一定的制動策略,來防止超速,或制止已經出現的超速情況。一般要把車速降低到對應的軌道限速以下,或按照司機駕駛的減速特性進行減速來保證精準到站停車。如果出現下坡段過分相存在因為惰行而超速的情況,則必須模擬司機的操作來提前減速,以防超速。通常,車速非常接近“公里標-限速”曲線的時候,可以放心地按照司機制動特性參數進行制動。當車速超過限速比較多的時候,制動就需要考慮全力常規制動、EB或UB了。
總體來說,牽引和制動這兩個狀態之間的轉移,主要取決于當前車速與目標限速之間的差距。模擬司機的操作特性控車,主要是在這兩個狀態下。當然,還要給目標速度增加一個調節的范圍,防止過于頻繁地在制動和牽引狀態之間進行切換。
1.2 惰行狀態
有了前面的幾個狀態之后,還根據動車組實際情況,添加了特殊的惰行狀態。有2種情況動車組會進入惰行狀態,因此要分別記錄與其相關的參數。
1.2.1 被迫惰行
當動車組經過分相區間的時候(實際上從分相的預告位置開始,到分相結束的標記位置之后動車組重新從弓網獲取電能的位置),動車組無法從受電弓獲取電能,被迫處于惰行狀態。因此,進入分相區間之前,要記錄牽引/制動的狀態,在離開分相區間的時候要恢復相應的狀態(進入前是牽引,離開時恢復牽引;進入前是制動,離開時恢復制動)。
1.2.2 主動惰行
主動產生的惰行,是自動控制系統判斷動車組的速度非常接近軌道限速或“公里標-限速”曲線定義的限速時,為了防止頻繁加減速而使用的策略。車速非常接近限速的時候,牽引容易導致超速,而制動則浪費動能。如果惰行可以維持車速在合理范圍內,且不超過限速,那么,自動控制系統可以選擇主動進入惰行狀態,防止頻繁地加減速切換。
2 在仿真中應用的效果
2.1 基本仿真過程
該高速動車組仿真系統中,動車組的運行狀態采用等時間間隔的遞推過程(從第i個狀態遞推到第i+1個狀態)來計算,其具體運算可以用如下公式組進行:
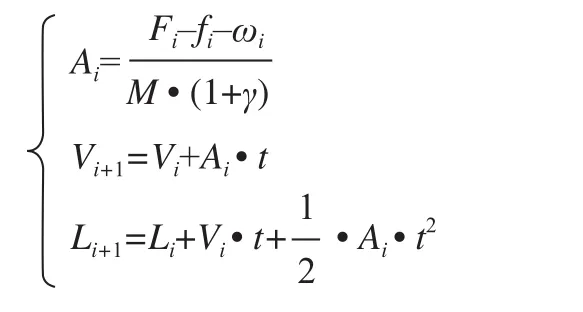
其中, Fi為動車組控制手柄級位換算的牽引/制動力;fi為阻力,來自經驗公式fi=a+bVi+CV2i, a、b、c為通過實驗獲得的經驗常數;ωi為軌道阻力,是動車組在公里標Li處的坡道、曲線、橋梁隧道等產生的阻力合力;M為動車組質量;γ為動車組回轉質量系數;t為兩個運行狀態之間的時間間隔。這些參數每個動車組的車型都不完全相同,一般可以從《規程》中獲取。
2.2 模擬司機操作特性
在以上狀態圖中的每個狀態(除了開始和結束狀態),都有自己的動車組手柄控制策略。模擬司機加減速的策略是在仿真系統的項目配置模塊輸入的。司機可以在不同的速度下,有不同的加減速控制方案,既可以對應有級位的手柄位置,又可以對應無級變速的手柄位置。當然司機的操作策略既可以是根據不同的速度使用不同的手柄擋位,也可以是簡單的使用最高擋位進行加速或減速。
在惰行狀態,相當于動車組控制手柄產生的牽引/制動力為0。在停車狀態時,仿真系統會加上停車制動,讓車速保持為0,來防止動車組因為軌道坡度等產生倒車、溜車的情況。
2.3 仿真結果
利用狀態轉換圖產生的動車組自動控制過程,很好的模擬了動車組駕駛員操控行為,從而能夠控制動車組沿著軌道線路,從始發站一直運行到終點站。控制狀態切換產生的加減速操作可以在仿真結果中看到,如圖 2所示, 上方紅色的包絡線為軌道限速,兩個車站之間的曲線為動車組的車速,橫坐標為公里標,縱坐標為車速。動車組加減速狀態對應控制手柄的狀態,用不同顏色表示,這些顏色反映了各控制狀態工作的區間和轉換的次序。
3 結束語
本文介紹了模擬駕駛員操作動車組功能的核心模塊—控制狀態轉換圖—的設計,該設計方案用于鐵科院機輛所開發的高速動車組仿真系統成功模擬了動車組司機的手柄操作行為。根據這個模擬司機的操作,仿真軟件能夠整條軌道線路上模擬司機駕駛的行為。根據手柄的級位記錄數據,仿真軟件能夠很好的區分牽引、制動、惰行等狀態,于是將這幾個狀態對應到消耗電能狀態、電制動發電狀態等,我們就可以很方便的統計出區間內的各種能耗數據,如圖 3所示。程序還很容易就能統計出牽引時間、制動時間等時間參數,為動車組的實際應用提供重要參考。

圖 2 動車組牽引制動仿真系統運行結果

圖 3 仿真軟件給出的能耗分析表
仿真測試結果,與實際運行情況非常吻合,證明了基于該狀態轉換圖的自動駕駛功能,能夠模擬動車組駕駛員控制手柄的操作,并完成控制動車組沿著軌道線路正常行駛的完整仿真過程。

猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32