基于MTPA的電動汽車用同步磁阻電機控制
2019-08-02 08:49:08高健
中小企業(yè)管理與科技 2019年17期
關鍵詞:實驗
高健
(浙江大學工程師學院,杭州 310015)
GAO Jian
(Polytechnic Institute,Zhejiang University,Hangzhou310015,China)
1 引言
隨著環(huán)境污染的日益嚴峻,燃料能源日漸短缺,電動汽車由于其能耗低、污染小等優(yōu)點已成為汽車工業(yè)發(fā)展的重要方向[1]。而電驅動系統(tǒng)作為電動汽車整車的核心部分,其硬件結構設計和控制理論方法的研究是提高電動汽車驅動性能的關鍵[2]。
同步磁阻電機(SynRM),是一種完全使用磁阻轉矩的同步電機,其結構簡單,制造成本低,安全性能良好,相比于感應電機,SynRM的功率密度和效率更高,此外,SynRM沒有永磁體,能夠更容易實現(xiàn)弱磁控制,適應高速運行,因此,SynRM可以滿足電動汽車運行對驅動電機的苛刻要求[3]。
同步磁阻電機(SynRM)與永磁同步電機控制系統(tǒng)在硬件結構和控制原理上差異不大,常用的控制方法主要有以下四種[6]:最大轉矩/電流比控制(MTPA)、最大功率因數(shù)控制、最大轉矩變化率控制、恒定磁場電流控制。在能源利用要求高效率的應用場合,如電動汽車驅動,MTPA是較合理的一種控制方法,實際上也是應用最廣泛的,也是本文采用的主要控制方法。NIAZI P等[7]給出了MTPA控制的系統(tǒng)框圖,并詳細介紹了基于PMa-SynRM數(shù)學模型的MTPA控制方法,通過在電機運行約束條件下求極值,推導出控制需要的d/q軸電流及最大轉矩與電機相電流相位角之間的數(shù)值關系。楊超等[8]研究了實際電機運行中,電機定子電阻、磁場和電感會隨著溫度和氣隙磁場的變化而發(fā)生改變,進而影響到MTPA控制效果,對電機進行實時的參數(shù)辨識能夠讓MTPA取得更好的控制效果。
本文對同步磁阻電機控制系統(tǒng)硬件模塊進行設計,并采用MTPA矢量控制方法實現(xiàn)了對同步磁阻電機的控制,驗證了該控制系統(tǒng)的可行性。
2 同步磁阻電機數(shù)學模型
同步磁阻電機轉子結構比較特別,無需勵磁,由于其交、直軸磁阻不等,在定子勵磁的情況下,交、直軸的磁路將會產(chǎn)生磁阻差異,從而得到驅動電機的磁阻轉矩[4]。一般將轉子結構中磁導較大的軸定義為d軸,磁導較小的軸定義為q軸[5]。常規(guī)同步磁阻電機的dq方程是:
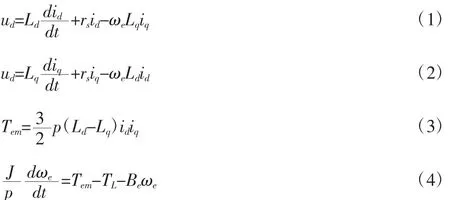
式中:Tem為電磁轉矩;p為極對數(shù);Be為電角速度摩擦阻尼系數(shù);ωe為電角速度;J為系統(tǒng)轉動慣量;TL為負載轉矩;Ld和Lq分別為直軸、交軸電感;ud和uq分別為直軸、交軸電壓。
轉矩公式(3)可改寫為:

式中:Im為電流矢量幅值;θ為電流矢量與d軸的夾角即為電流角。
忽略電機磁鏈飽和效應,由公式(3)的轉矩方程可知,當電流角θ=45°,可得最大電磁轉矩Tem。
最大轉矩電流比控制(MTPA)轉子磁場定向矢量控制如圖1所示,通過轉速、電流閉環(huán)得到給定電壓值ud和uq。

圖1 MTPA矢量控制框圖
3 實驗驗證
實驗平臺如圖2所示,檔位開關控制電機的轉向,油門與剎車控制電機的啟停,測功機模擬實際的工況進行加載。
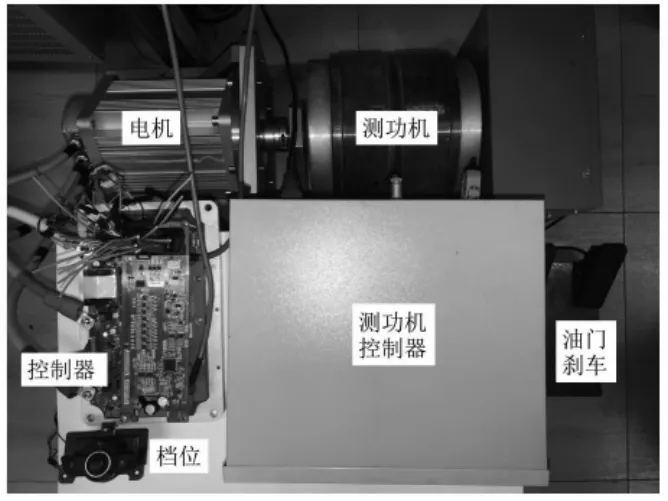
圖2 所用實驗平臺
實驗所用電機參數(shù)如表1所示,三相同步磁阻電機實驗系統(tǒng)結構框圖如圖3所示。
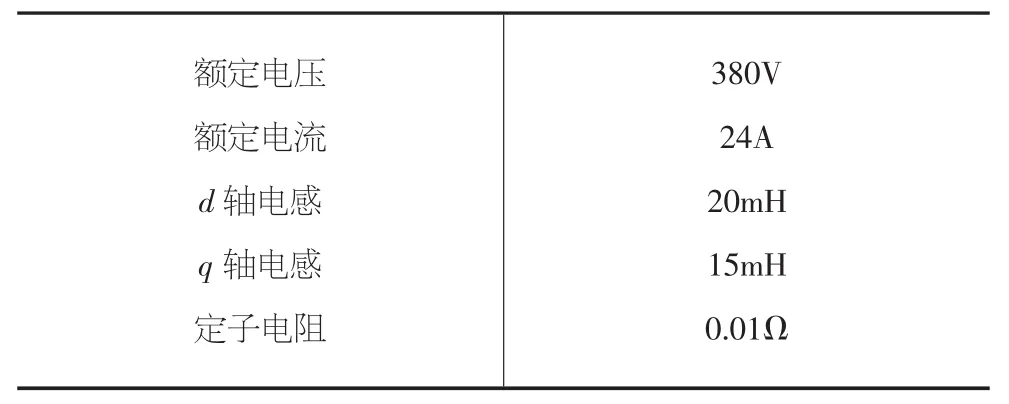
表1 電機額定參數(shù)
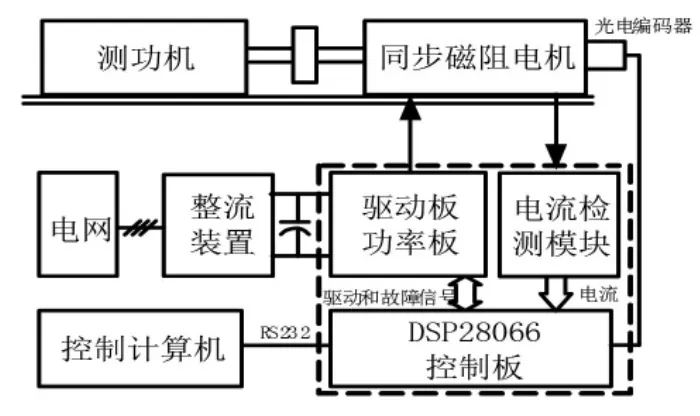
圖3 三相同步磁阻電機實驗系統(tǒng)結構框圖
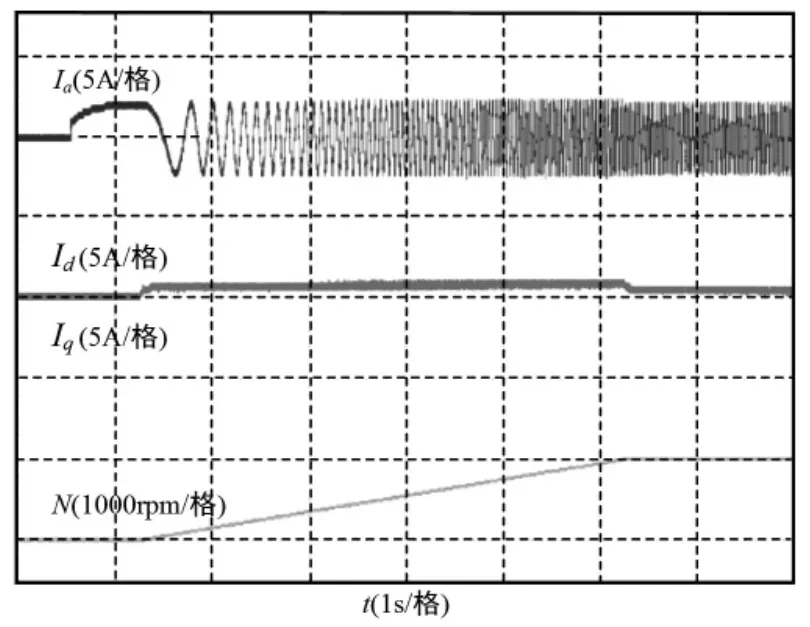
圖4 三相同步磁阻電機空載啟動波形圖
圖4是三相同步磁阻電機空載啟動過程波形圖,從波形可以看出電機啟動平穩(wěn),達到設定的轉速1000rpm后,能穩(wěn)定運行。
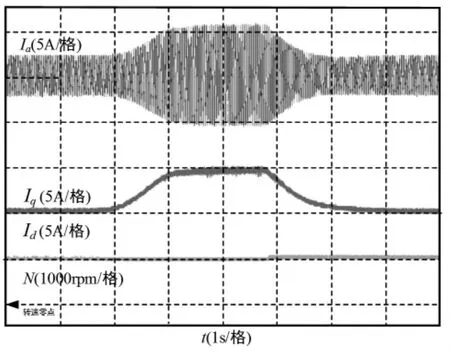
圖5 三相同步磁阻電機加/減載波形圖
圖5是三相同步磁阻電機加/減載過程波形圖,從波形可以看出,電機載加/減載過程中有著很好的動態(tài)性能,轉速能夠穩(wěn)定在1000rpm,從實驗波形可知,該電機控制器能夠使同步磁阻電機良好的運行。
4 結論
①本文設計了適用于電動汽車的同步磁阻電機的控制器;
②采用MTPA矢量控制算法對同步磁阻電機進行控制,實驗結果證明,軟、硬件的設計能夠較好地實現(xiàn)對同步磁阻電機的啟動和運行;
③三相同步磁阻電機運行時,電機參數(shù)會隨著電機溫升和工況發(fā)生變化,無法在電流角θ=45°時實現(xiàn)MTPA控制,有必要進行實時的參數(shù)辨識。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55