賽艇船槳力學建模分析與測量系統實現
2019-08-05 01:23:34郭書軍
儀器儀表用戶 2019年9期
田 香,郭書軍
(北方工業大學 信息學院,北京 100144)
0 引言
賽艇是一個多體相互作用的復雜的動力系統,其運動技術的好壞體現在能否最有效地利用體能驅使船體前進。運用當前先進的傳感采集以及無線通信技術,能夠將運動數據采集下來并進行船槳力學建模分析,幫助運動員更好的訓練。
本研究根據賽艇水上能力評價訓練的信息化需求,設計基于多傳感器數據融合技術的水上訓練監控系統,便于運動員和教練實時監測,為評價提供相應的科學依據。
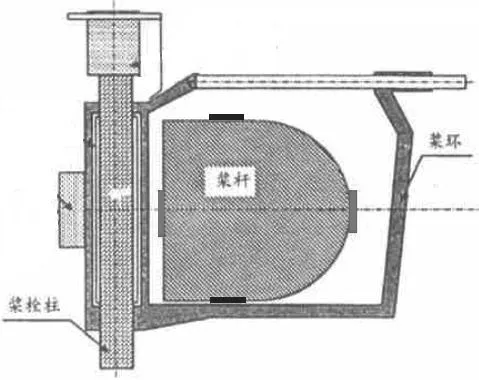
圖1 應變片擺放圖Fig.1 Strain gauge placement
1 船槳力學建模
在賽艇運動過程中,存在多個力的共同作用,這些力來自于腳踏板、座椅、槳柄、槳板等。但是在運動員與賽艇之間,這些力多為內力。雖然它們對于賽艇運動員的技術分析是重要的,但是只有槳板與水的作用力,才能產生直接的前進推力,推動賽艇前進。
1.1 船槳力概述
槳力是促使賽艇向前運動的主要因素。力是一個矢量,這意味著它既有方向也有大小。力的單位是牛頓(N)=kg×m/s2,代表1 牛頓力可以給1kg 物體1m/s2的速度。
在劃水運動中,船槳可以抽象成一個杠桿,槳栓是支點,所以槳板、槳柄、槳栓上的力是相互聯系的。運動中,槳板與水的作用點不固定,且與水接觸面積大小也不固定,這使得槳板與水之間的力測量的難度較大,且穩定性差。本系統選取測量船槳與槳栓間的作用力,進而通過力學模型推導出槳對船體的作用力。
1.2 船槳力測量
應變片測量力的原理是:將應變片貼在被測定物體上,它會隨著被測定對象的應變一起伸縮,這樣使得應變片里面的金屬箔材隨著應變伸長或縮短,通過測量應變片的阻值變化而對應變進行測力的變化。本設備利用上述原理在槳柄上放置應變片,用來測量船槳、槳栓間的作用力。
本設計中,在槳桿上相對的兩個方向分別擺放兩組應變片,組成兩個惠斯通全橋電路,測量船槳由于劃動而產生的應變力,如圖1 所示。
兩組全橋電路,其測量的力角度如圖2(a)所示(另外3 組全橋電路分別與其成90°、180°、270°)。其中,力F1 和力F2 分別由兩組電橋采集測量所得,根據力的平行四邊形定則可以形成合力F12合。圖2(b)中合力F12合經過平行四邊形定則分解后,分解出與船行進方向平行的有效力F有用。

圖2 (a) 力的合成方向Fig.2 (a) Direction of force synthesis

圖2 (b) 合力分解圖Fig.2 (b) Resultant decomposition diagram
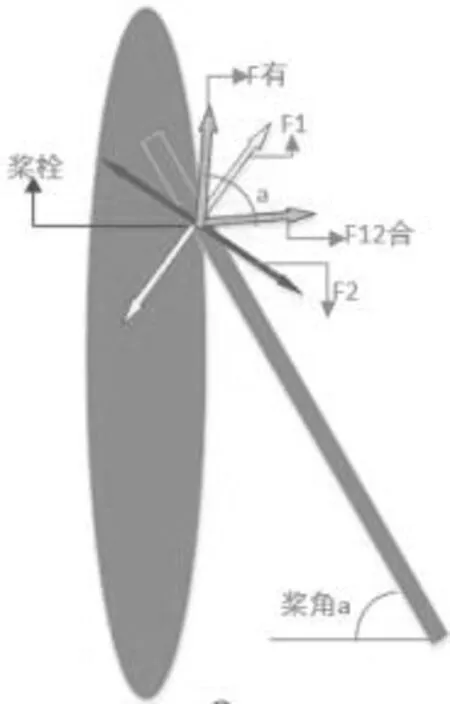
圖3 力的平面分解圖Fig.3 Flat breakdown of forces
力的平面解析圖如圖3 所示,船槳作用力的模型及力的計算公式如下:

2 系統硬件設計
本系統終端采用STM32 芯片作為核心處理器,外部由測力模塊、加速度測量模塊、無線通信模塊、電源模塊、鍵控模塊等組成。

圖5 測力模塊電路圖Fig.5 The circuit diagram of the force-measuring module
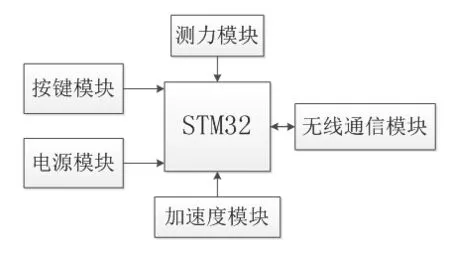
圖4 系統終端硬件框圖Fig.4 Hardware block diagram of system terminal
當啟動按鍵觸發后,測力模塊以每秒10 次的頻率進行采集,加速度模塊以每秒100 次的速率進行采集,采集到的數據通過無線通信模塊發送到服務器。當按鍵被再次觸發時,傳感器停止數據采集,系統進入休眠狀態。系統終端硬件框圖如圖4 所示。
2.1 船槳力測量模塊
測力模塊由惠斯通全橋電路、5V 電源、放大電路模塊組成。測力模塊電路圖如圖5 所示。
本系統在船槳上搭建兩組測力模塊。兩組測力模塊的輸出信號被主控模塊STM32 進行ADC 采集。采集到的兩路電壓值,分別經過電壓-壓力轉換得到壓力值后,帶入公式(1)中,計算其有用力。
2.2 加速度采集模塊
加速度模塊采用的是MPU6050,該模塊整合了六軸運動處理組件(三軸加速度和三軸陀螺儀)。與多組件相比,避免了加速度計和陀螺儀之間的時差問題,并為小型化設備提供了更優化的選擇。
通過加速度模塊進行角度采集。角度數據格式如表1所示。
根據公式(2)計算槳角pitch,并將角度代入公式(1)中計算槳力。

表1 角度數據格式Table 1 Angle data format

3 系統軟件
系統軟件主要包括無線通信模塊的數據通信程序,加速度模塊的角度采集、計算程序、測力模塊程序、按鍵控制程序等。
系統上電后先進行系統函數的初始化,包括時鐘配置,延時函數,ADC 采集端口初始化,調試程序時所需串口,以及加速度模塊等初始化。循環等待按鍵key 開始、結束采集信號。當按鍵key 按下,主控模塊開始對測力模塊進行ADC 數據集采,對加速度模塊進行數據采集,主控模塊將采集到的數據進行計算整合后通過無線通信模塊上傳至云端服務器。當按鍵key 再次按下,主控模塊停止數據采集、無線模塊停止上傳數據。系統的程序如圖6 所示。
4 測試指標及分析
本系統的終端設備安裝在賽艇船槳槳柄處,壓力傳感器安裝在槳柄與槳栓連接處,安裝實物圖如圖7 所示。測試中得到的典型測試數據曲線如圖8 所示。劃槳周期可以采集到整個拉槳、回槳過程中各時間點的槳角、力量等數據,以便運動員賽后查看。
1)在槳葉入水后,拉力迅速上升,槳角值不斷增大,當槳葉運行至與賽艇相垂直時,拉力到達最大值。
2)回槳時,槳葉處于水面上方,沒有在水中產生前進的推力,此時槳力相對平穩較小。

圖6 硬件程序流程圖Fig.6 Hardware program flowchart
測試曲線符合賽艇劃槳的運動規律,為訓練提供數據支撐與科學依據。教練與運動員通過查看運動后數據,了解自身技術特征,并作出有針對性的改進,提高自身競技水平。

圖7 測試安裝實物圖Fig.7 Test installation physical map
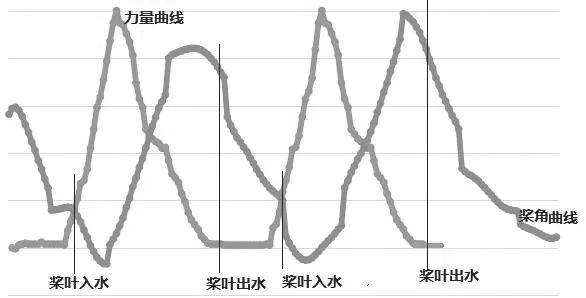
圖8 槳角、壓力曲線圖Fig.8 Oar angle, pressure graph
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
