兩輪自平衡車控制系統(tǒng)的研究
2019-08-15 03:41:12龔成南京工程學(xué)院
數(shù)碼世界 2019年8期
龔成 南京工程學(xué)院
1 兩輪自平衡車簡(jiǎn)析探討
對(duì)于兩輪自平衡車而言,它是一種動(dòng)態(tài)的平衡機(jī)器人,其內(nèi)部中的兩輪共軸,獨(dú)立驅(qū)動(dòng),車身重心位于車輪軸的上方,從而可以通過運(yùn)動(dòng)使其保持平衡,而不借助外力的作用進(jìn)行治理行走。在近一些年來,兩輪自平衡車它以靈活,便利,節(jié)能等諸多優(yōu)點(diǎn)使其在各個(gè)行業(yè)當(dāng)中得到了關(guān)注的使用。在本篇文章當(dāng)中,我們主要的簡(jiǎn)單的探討并且設(shè)計(jì)一臺(tái)兩輪小車,在進(jìn)行核心控制器的選擇上,主要是選擇飛思卡爾系統(tǒng)的MC9S12XS128 單片機(jī),接著采用MMA7260 加速度計(jì)以及ENC03 陀螺儀為敏感元器件,從而在一定的程度上使其能夠?qū)崿F(xiàn)兩輪小車的平衡,接著在按照設(shè)計(jì)的速度以及小車速度的偏差,有效的控制電機(jī)的電壓從而實(shí)現(xiàn)速度的控制,接著使用電磁感應(yīng)線圈來對(duì)路徑信息進(jìn)行收集,按照按照徑路的彎曲控制有效的實(shí)現(xiàn)小車直立角度的變速控制。
2 系統(tǒng)的組成簡(jiǎn)析探討
在該兩輪自平衡車中選用的系統(tǒng)主要是飛思卡爾公司生產(chǎn)的16位雙核微型處理器MC9S12XS128,它主要是通過直立控制模塊,以及速度控制模塊,方向控制模塊,變速控制模塊這四個(gè)方面的模塊來進(jìn)行組成的。我們可以從圖1 當(dāng)中的內(nèi)容了解到,可以對(duì)鋪設(shè)在車道中心的銅線對(duì)其進(jìn)行通交流電,從而在一定的程度上使其車道出現(xiàn)交變磁場(chǎng)的情況發(fā)生。并且小車也可以通過這一種磁場(chǎng)有效的行駛在車道當(dāng)中,另外我們還可以了解到在直立控制模塊當(dāng)中,它包含有著陀螺儀以及加速度計(jì),都是安裝在小車的中心偏下位置當(dāng)中,從而使其小車能夠在行駛的過程當(dāng)中保持較好的直立狀態(tài)。另外相應(yīng)的速度控制模塊它主要是需要安裝在左右輪的編碼器中,對(duì)其進(jìn)行測(cè)速,當(dāng)測(cè)試出來的結(jié)果還需要與前期設(shè)定速度兩者進(jìn)行有效的比較。并且方向控制模塊通過安裝于小車運(yùn)動(dòng)其那方探測(cè)支架上的左右兩電磁傳感器當(dāng)中,其能夠有效的掌控兩輪實(shí)現(xiàn)差速轉(zhuǎn)彎的效果,在這一個(gè)過程當(dāng)中,我們需要通過一定的運(yùn)算從而對(duì)其有效的調(diào)節(jié)小車的傾角大小,能控制小車行進(jìn)加速度的變化。
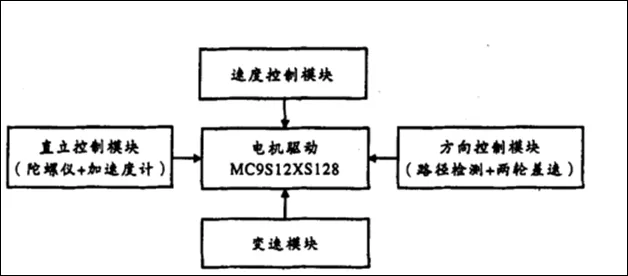
圖1 系統(tǒng)總體框架分析
3 兩輪自平衡車內(nèi)部各個(gè)模塊簡(jiǎn)析探討
3.1 直立控制模塊分析
對(duì)于小車而言,它的智力控制是行走的基礎(chǔ),在本篇文章當(dāng)中小車它主要是通過ENC03 陀螺儀收集到的角速度,來對(duì)其進(jìn)行分析,從而得出的角度值使其作為脈沖寬度調(diào)制的比例系數(shù)控制電機(jī),來在一定的程度上使其能夠有效的控制兩輪車的直立形式。在這一個(gè)過程當(dāng)中,得出的角度值需要在每隔一定時(shí)間便于加速度計(jì)收集到的角度值進(jìn)行有效的比較,從而使其能夠消除陀螺儀帶來的誤差以及偏差量,讓陀螺儀能夠更好的對(duì)其進(jìn)行追蹤加速度計(jì)所測(cè)試得出的瞬時(shí)角度值。
但是在這一個(gè)過程當(dāng)中我們需要了解到,如果角速度的間隔時(shí)間太長(zhǎng)的話,也不能很好地反應(yīng)出車模的角度變化狀態(tài),但是如果時(shí)間過短也不能很好的消除陀螺儀的噪聲影響效果。因此我們?cè)谶M(jìn)行一定的實(shí)驗(yàn)之后可以發(fā)現(xiàn),使其時(shí)間能夠控制在4MS 的時(shí)候效果是最好的。而且陀螺儀的加速度計(jì)進(jìn)行比較的時(shí)間太多,則不能很好的跟蹤加速度計(jì)的值,若是太短則會(huì)給人帶來加速度計(jì)的噪聲,因此在的那個(gè)當(dāng)前我們需要了解到陀螺儀的積分結(jié)果能夠很好的跟蹤加速度計(jì)輸出的角度值,并且在內(nèi)部中進(jìn)行輸出的數(shù)據(jù)較為平穩(wěn)的話,則能很好的反映出車模的瞬時(shí)角度值需求。
3.2 速度控制模塊分析
對(duì)于速度控制模塊而言,它主要是在小車進(jìn)行直立行駛的基礎(chǔ)上,提供在小車內(nèi)部設(shè)立一個(gè)速度,從而將編碼器測(cè)試得出的實(shí)際速度與設(shè)計(jì)速度兩者進(jìn)行有效的比較,并且在最后將比較得出的結(jié)果作為反饋量來進(jìn)行分析,從而有效的控制PWM 的輸出,使得小車能夠按照設(shè)定速度來進(jìn)行有效的實(shí)行。
對(duì)于MC9S12XS128 這一個(gè)類型的單片機(jī)來講,它的內(nèi)部系統(tǒng)中只有一路脈沖計(jì)數(shù)器,那么在這一個(gè)過程中,我們主要是使用分時(shí)測(cè)速的方式來對(duì)小車的左右輪速度進(jìn)行測(cè)量。并且按照?qǐng)D2 當(dāng)中的內(nèi)容,我們可以了解到,在左輪以及右輪當(dāng)中,它主要是通過從BY 以及BX 這兩個(gè)端口來進(jìn)行輸入的,并且從BXY 輸出并且加載到單片機(jī)的計(jì)數(shù)段中,來進(jìn)行有效的選擇。
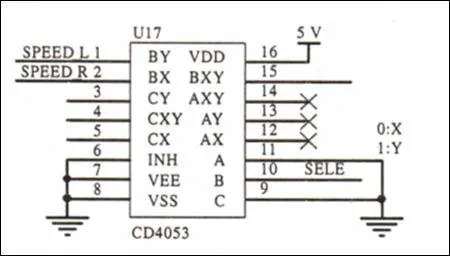
圖2 分時(shí)測(cè)試電路圖分析
3.3 方向控制模塊分析
我們可以從圖3 當(dāng)中的內(nèi)容了解到,小車的運(yùn)行方向主要是通過差速來進(jìn)行控制的,并且通過測(cè)試左右兩電磁感應(yīng)線圈的電壓數(shù)值,對(duì)這兩個(gè)數(shù)值的和以及差讓其能夠加載到外輪以及內(nèi)輪的p WM 中進(jìn)行輸出,從而使其能夠在一定程度上有效的實(shí)現(xiàn)小車的差速控制。
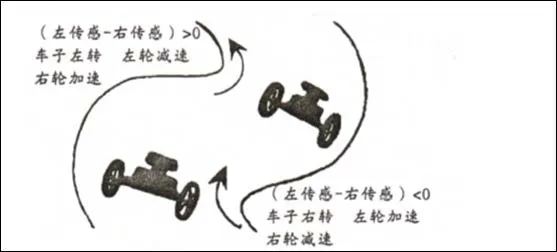
圖3 小車的方向控制
3.4 變速模塊分析
我們可以了解到電磁兩輪自平衡小車,它的速度控制是一個(gè)重要的難點(diǎn),因此我們可以知道當(dāng)小車在直立的狀態(tài)下進(jìn)行向前或者向后的運(yùn)動(dòng)過程中,所造成的傾角大小將會(huì)直接的營(yíng)銷到電機(jī)電壓的大小。因此在當(dāng)前,我們需要通過有效的掌控小車的傾角從而實(shí)現(xiàn)控制車子的加速度。在這一個(gè)過程當(dāng)中我們采用的方式主要是通過設(shè)定一個(gè)限制值使其它能夠作為加速以及減速的分界線,將左右電磁傳感器測(cè)量的電壓只差以及電壓之和對(duì)其進(jìn)行比例調(diào)節(jié),使其能夠得出左右傳感歸一的差值。接著我們?cè)趯⑦@一個(gè)差值使其讓它能夠與設(shè)定好的限制值兩者進(jìn)行有效的比較,若是在比較的過程中發(fā)現(xiàn)超過限制值則應(yīng)當(dāng)對(duì)其進(jìn)行減速,直到小車運(yùn)動(dòng)方向與車道上的電磁定向銅線方向進(jìn)行一致,反之則需要對(duì)其進(jìn)行加速前進(jìn)。
4 結(jié)束語
大體的說來,在本篇文章當(dāng)中,我們主要是簡(jiǎn)單的探討了兩輪自平衡小車控制系統(tǒng)的設(shè)計(jì)思想以及實(shí)現(xiàn)方式,從而系統(tǒng)當(dāng)中的直立控制模塊,速度控制模塊,方向控制模塊以及變速模塊等幾個(gè)方面進(jìn)行著手,并且對(duì)這一些模塊中的軟硬件進(jìn)行了有效的分析,也給出了相關(guān)的內(nèi)容。因此我們可以了解到在本篇文章當(dāng)中設(shè)計(jì)的系統(tǒng)是十分合理的,它能夠有效的幫助兩輪自平衡車的使用以及應(yīng)用。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
小天使·一年級(jí)語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44