基于時序的艦空導彈試驗靶標數據處理
2019-08-27 03:47:02顏世剛時維科
火力與指揮控制 2019年7期
顏世剛,時維科,盧 鑫
(解放軍92941部隊,遼寧 葫蘆島125001)
0 引言
在海軍艦空導彈設計鑒定試驗中,外測靶標航路真值數據的分析處理極為重要,通過對靶標真值數據的分析處理,獲取其精確空間位置、加速度等參數數據,作為評估被試武備戰技性能、精度的基礎和依據。從某種意義上說,外測數據的分析處理水平代表了靶場的試驗水平,作為外測數據分析本身,要不斷研究新的處理方法,不斷提高數據處理的精度和效率。在艦空導彈武器系統試驗中,靶標類型多種多樣,不論是大飛機類、無人機類還是靶彈類靶標,首先要外測靶標的空間位置、姿態、航路數據,通常采用GPS定位、北斗定位、光測、雷測等技術手段。外測靶標數據率通常與武備內部網數據率不同,且時戳序列點完全不一致,無法對齊。因此,在進行精度誤差處理前,首先要對外測靶標真值數據進行基于武備時間序列的插值,通過插值等一系列處理,完成外測真值數據與艦空導彈系統內部報文時序的嚴格對齊[1],以保證系統數據分析的精度。
1 靶標數據處理基本流程
根據被試艦空導彈系統內部網數據率、時序,把外測靶標數據按照其時序進行處理,達到與艦空導彈系統內部數據時序嚴格一致,用于系統戰技指標、精度的分析與評估[2],處理流程見圖1。首先對外測靶標真值數據導入,提取時間序列,然后對異常點進行剔點平滑處理;導入艦空導彈系統內部網數據,提取其時間序列,建立插值點時序矩陣,把靶標數據作為數據源,基于艦空導彈系統內部時序點進行插值處理,然后根據實際需要進行坐標平移和旋轉,轉換到需要評估的系統設備上。
圖1 基于時序的靶標數據處理流程圖
2 數據預處理及剔點算法
數據預處理包括外測靶標真值數據和艦空導彈系統內網數據的預處理,主要是提取外測靶標的空間坐標、時戳和艦空導彈系統內網數據、時序,并對靶標真值數據進行“異常點”剔點平滑處理。
2.1 數據預處理
導入靶標真值數據包,放入矩陣結構中,提取靶標的空間位置信息和時間序列[3],為北京絕對時,格式為“時:分:秒.毫秒(t:min:s.ms)”;導入艦空導彈系統試驗內網數據包,提取時序信息,時間北京絕對時,單位格式“s”。
2.2 靶標真值數據剔點處理
由于原始外測靶標真值數據中可能存在個別大隨機誤差或疏失誤差的野值,這是數據錄取的異常或其他意外干擾造成的,酌情對“奇異點”進行剔除、平滑處理。剔點處理方法有四點外推法,直觀法、一階多項式平滑法、一階多項式平滑的殘差平方法等[4-5]。由于靶標數據采樣時間序列是等間隔的,故采用比較快捷簡單的四點外推法進行應用分析。
2.2.1四點外推模型公式
首先判斷要處理的數據序列前四點數據的合理性,然后從第5點開始,由前四點數據,用最小二乘法進行線性外推,剔除奇異點。公式如下:

其中,Xie為第i點的外推值;Xi-1為第i-1點的實際值;Xi-2為第i-2點的實際值;Xi-4為第i-4點的實際值。
2.2.2四點外推模型使用原則
1)四點外推法公式,僅適用于時間序列是等間隔的情況。
2)當Xi被接受時,繼續外推下一點。
3)當Xi被剔除時,記錄并輸出剔點位置,對于剔除的Xi采用第3節的插值方法補齊;下面的4個點不再進行剔點處理,直接保留,從第5個點開始,重新剔點。
4)發生3個以上的連續剔點時,必須檢查原始數據,檢查是否有連續的剔點誤差,采取相應的措施對原始數據進行更改,防止歪曲航路。
5)剔點標準δ的選取。δ取值過小,可能造成連續剔點,歪曲航路;δ取值過大,個別“奇異點”又不能被剔除,造成真值數據的大誤差,一般δ選擇:

其中,σ為GPS真值觀測設備精度誤差。
3 插值算法
插值算法常用的有拉格朗日插值、Newton插值等,拉格朗日插值和Newton插值在實際的數據處理中有著廣泛的應用[6-10],下面對二者在基于時間序列的離散數據插值中的應用作進一步分析。
3.1 基于時間序列的拉格朗日插值算法

其中,每個lj(t)為拉格朗日基本多項式(或稱插值基函數),其表達式為:
拉格朗日(Lagrange)插值主要應用于對內插值的計算,優點在于公式結構整齊緊湊,在理論分析中十分方便,計算的采樣點處的值不會改變;缺點在于當插值點增加或減少一個時,所對應的基本多項式就需要全部重新計算,于是整個公式都會變化,當插值點比較多的時候,拉格朗日插值多項式的次數可能會很高,因此,具體數值有不穩定的特點,也就是說盡管在已知的幾個點取到給定的數值,但在附近卻會和“實際上”的值之間有很大的偏差。這類現象也被稱為龍格現象[11-14],解決的辦法是分段用較低次數的插值多項式。
3.2 基于時間序列的Newton插值算法
Newton插值多項式可表示為:


可用式(7)構造插值多項式和差分表,用式(8)做插值。牛頓插值具有公式形式簡單,便于計算的優點,而且增加新點之后,不用導致之前的重新計算[14]。
4 坐標變換
坐標變換通常包括坐標系平移和坐標系旋轉。在實際數據處理中,經常要把數據從一個設備位置點變換到另一設備位置點,而兩設備坐標原點和坐標軸指向都不相同[15]。
4.1 坐標平移
4.2 坐標系旋轉
5 實例應用分析
5.1 數據及時序提取分析
在某型艦空導彈武器對空動態校飛試驗中,目標靶機加裝GPS,數據率為20 Hz,通過數據的預處理,選取GPS測量值中連續16個數據點作為研究樣本,詳見下頁表1,其中時間序列為北京時間絕對時,格式為“時:分:秒.毫秒(t:min:s.ms)”;被試某型艦空導彈武器系統內網數據率為25 Hz,時間序列為北京時間絕對時,單位格式“s”,選取連續4個數據點的時間序列作為樣本點,詳見表2。
5.2 數據的剔點處理
按照2.2節四點外推剔點算法,GPS觀測設備精度σ選擇0.30 m,根據式(2)得δ=1.273 m;對表1數據進行異常點檢查。下面以5號點Z坐標數據示例說明檢測剔點過程。

根據式(1)有:

則:
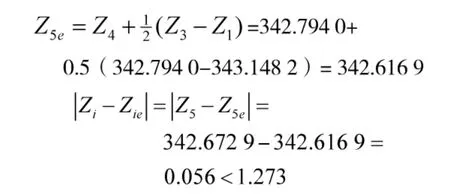
其中,Z5坐標滿足條件,接受保留,其他點數據檢測處理類似。
5.3 數據插值
在插值計算時,可根據實際情況選擇采用拉格朗日插值算法還是采用牛頓插值算法,在導彈試驗數據的處理中,因為試驗數據插值時間序列是等間距的,一般采用牛頓插值法。
5.3.1拉格朗日算法插值
如果直接用拉格朗日插值模型,由于實際處理的數據多達上萬點,拉格朗日插值多項式的次數不可控,插值數據出現龍格現象。為避免龍格現象,采用數據中心低階分段插值的方式,對于空中機動靶標,極短時間內插值點與其前后等距離數據點狀態的關聯性幾乎是均等的,在插值點前200 ms和后200 ms以內,靶標在理論上不會出現極端的運動變化。因此,選擇插值點前后各4個點,共8個數據點作為一次插值區段。例如,為完成表2中1號點插值,選取表1中5~12號點作為插值區段進行計算,其他點插值區間類似選取,計算時首先把GPS真值的北京時間的絕對時戳轉換為以秒為單位的量綱形式,再進行相應的計算,通過MATLAB的仿真計算得出插值結果如下頁表3。
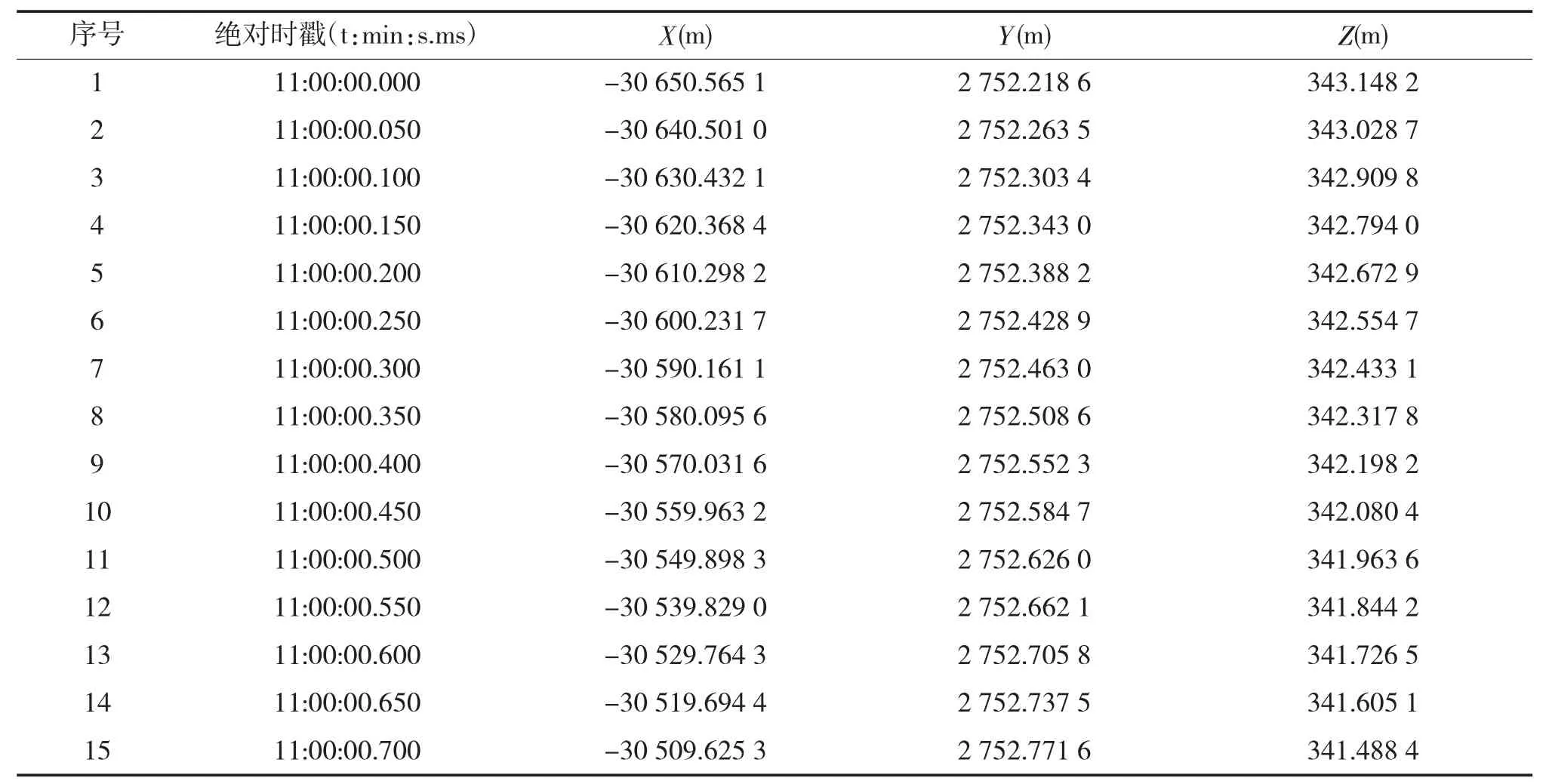
表1 靶標GPS真值數據
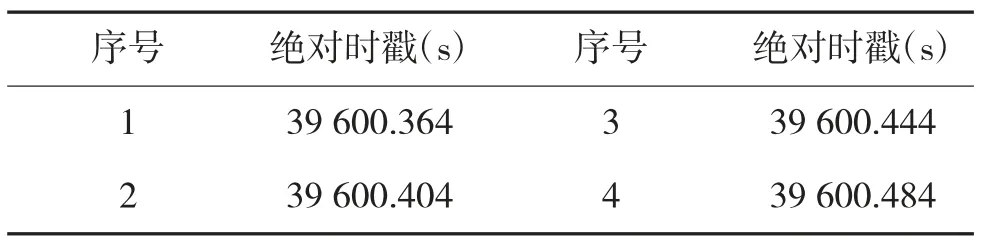
表2 某型導彈系統內網數據時間序列
5.3.2 Newton算法插值
根據Newton前向插值模型算法式(7)、式(8),使用表1、表2數據通過MatLab仿真計算得出插值結果,如表4所示。
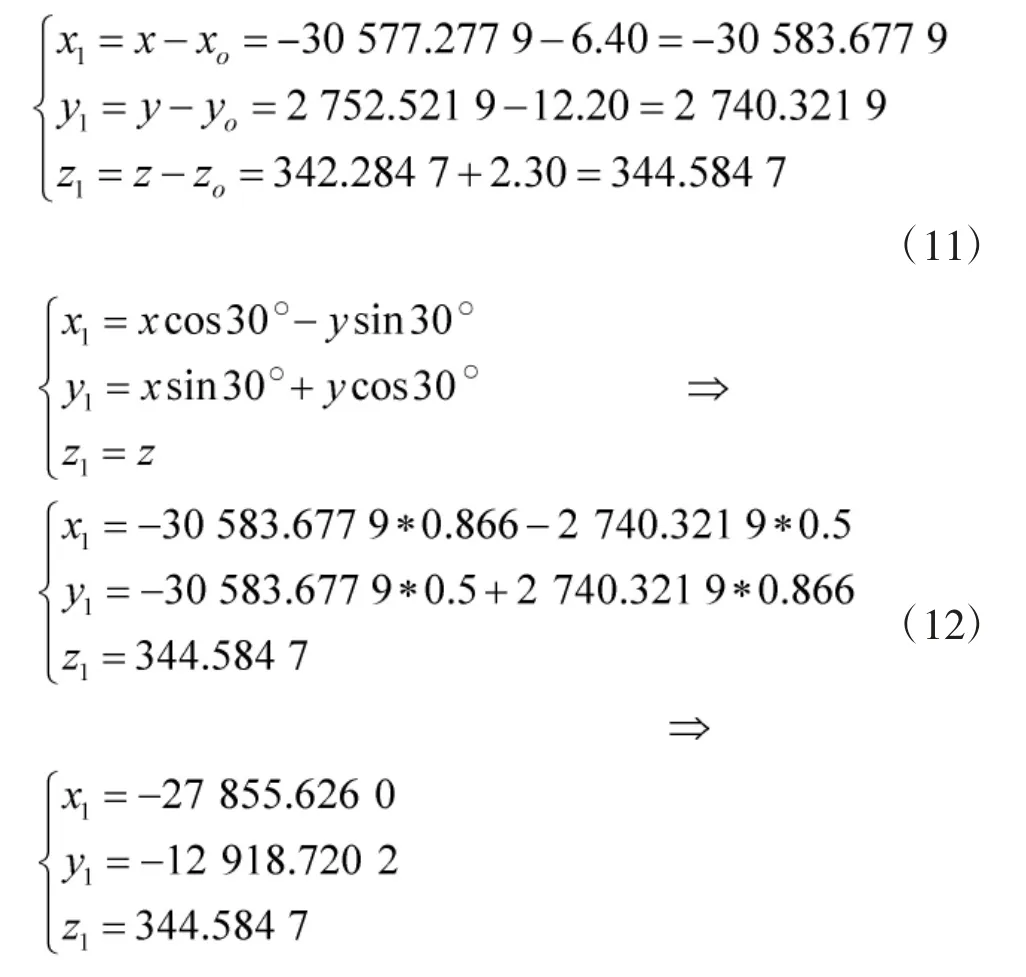
5.4 坐標的轉換

表3 拉格朗日插值結果表

表4 Newton插值結果表
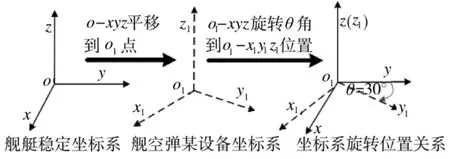
圖2 坐標變換關系圖
6 結論
在艦空導彈武器系統試驗鑒定中,數據分析的首要任務是對外測靶標真值數據的分析處理,對于靶標數據和武器系統內部數據有一個顯著的特點是數據全部基于時間序列,但二者數據率和時序完全不一致;外測靶標真值數據處理的目的是轉為嚴格對應武備系統內部時序的真值序列,為后續的系統精度、戰技指標的分析處理奠定基礎。本文系統分析了四點外推剔點算法、拉格朗日及牛頓插值算法、坐標轉換算法的實際應用,深入研究了基于時間序列的外測靶標真值數據處理分析的方法流程,并給出了在某型艦空導彈試驗中的具體應用實例。本文研究的內容方法,在艦空導彈試驗中有著成熟的應用,此方法對于其他武器裝備試驗數據分析處理有著極強的借鑒意義和應用價值。